

1.介绍
倒立摆模型被广泛运用于火箭的发射、双足机器人的建模.那么到底什么是倒立摆呢?怎么理解其内在的运动规律?本文将从数学建模、Webots的仿真等多个维度给你一个全方位、多角度的解答,那么让我们开始吧.
这是一个普通的钟摆:
图1.1 钟摆
将其倒立放置,于是你就得到了一个倒立摆:
很简单,是吧.倒立摆更为官方的定义是质心在铰链上方的系统.它是一个很不稳定的状态,现在想象在你的指尖放置一个扫帚,你应该怎样做使它平衡呢?

没错,你需要不断的移动你的身体,这样才能让扫帚一直保持竖直状态,这看起来会很滑稽,但是却形象的表示了一阶倒立摆的基本原理.为了更好的数学建模,我们利用最经典的小车摆改模型,它是长这个样子的:

这里的小车模型假设摆杆的质量为0,同时在摆改的顶端加上一个质量为m的小球.这个模型和假设只有一个长度为2l质量为m的摆杆模型是等价的(读者可以先想一下是为什么,后面会揭晓答案).有了基本的物理模型,我们就可以对其进行受力分析,建立数学模型了.
2.数学建模
数学建模主要有牛顿第二定律法和拉格朗日法[1],这里主要介绍第一种,看不懂或者不想看公式推导的可以直接看加粗字体部分,不影响食用哦.
摆杆的受力分析如图2.1所示,根据牛顿第二定律得到:
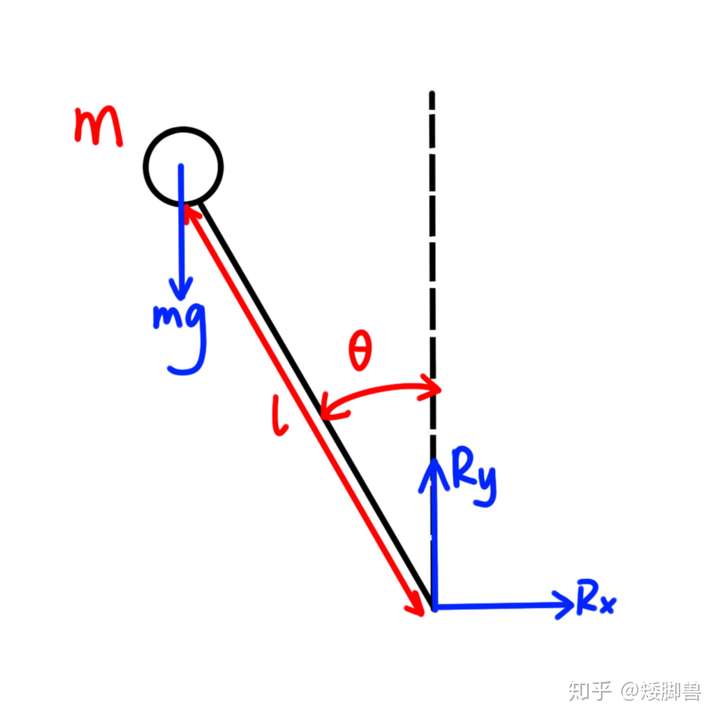
图2.1 摆杆的受力分析
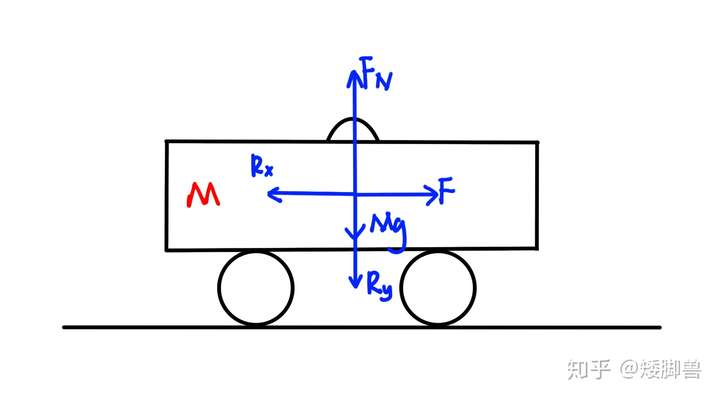
小车的受力分析如图所示,根据牛顿第二定律得到:
小球质心的位置为(加粗表示矢量):
对式2.5二次求导得到小球的加速度:
将式2.6带入式2.1和式2.2得:
将2.式带入2.7式得:
至此,我们就得到了外力和运动的关系.在推导位移和角度的关系之前,先引入一个与摆杆垂直的单位向量 :
将与摆杆所受和力相乘的到2.10.
其中 ,注意
,
.
将与摆杆加速度相乘的到2.11.
综合2.10和2.11得到:
这就得到了小车的位移和摆杆偏离角度的关系表达式.
3.Webots仿真
这个是webots的方针结果,采用PID控制.感兴趣的同学可以到官方网址下载学习.

由于时间仓促,错误在所难免,欢迎在评论区指正.如果你这篇文章给你带来了帮助,就给点给赞呗.你们的支持是我更新的最大动力,啾咪~




评论(0)
您还未登录,请登录后发表或查看评论