


台大机器人学——林沛群
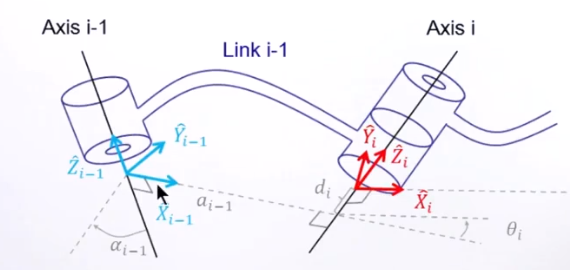
进一步精准找到两个frame之间的变换关系(Transformation Matrix的量化表达式什么)
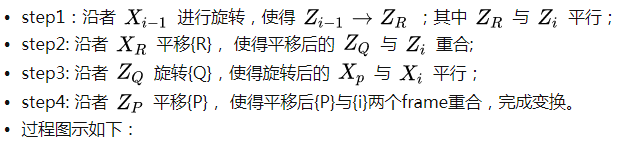
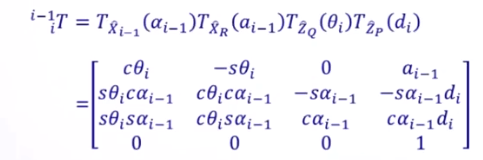
要如何借由DH表达法中的4个参数,求得Transformation Matrix?
- 其中,按照mapping后乘思想,可列出:

- 继续拆解:


- Thus:
- 有了i与i-1的frame的转换关系后,连续的link transformations也很好求:
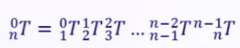
Frame{n}相对于Frame{0}的空间集合关系清楚,且量化的定义在Frame{n}下表达的向量可以转回到Frame{0}下来定义表达(对地)。
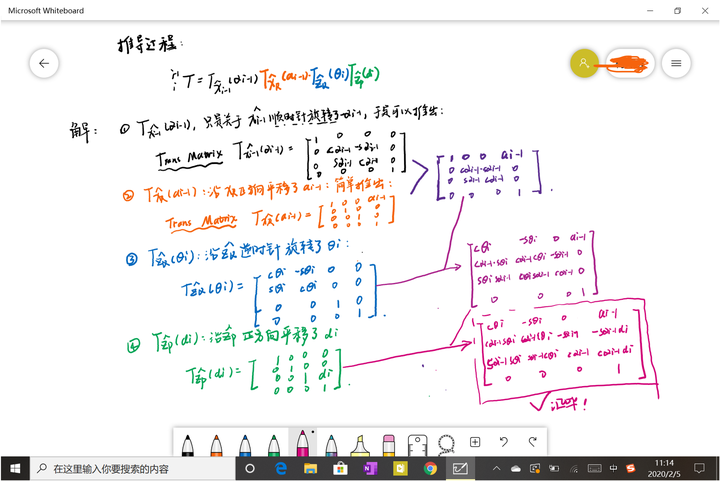
Example1:
上面的详细推导过程:
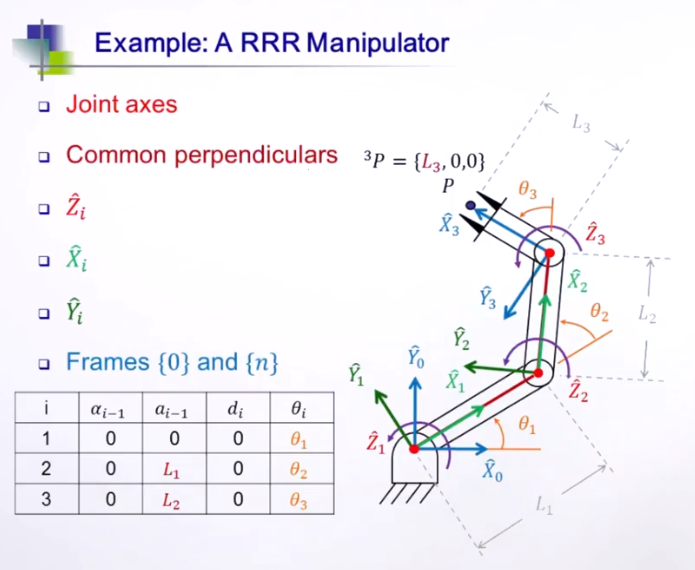
Example 2: A RRR Manipulator
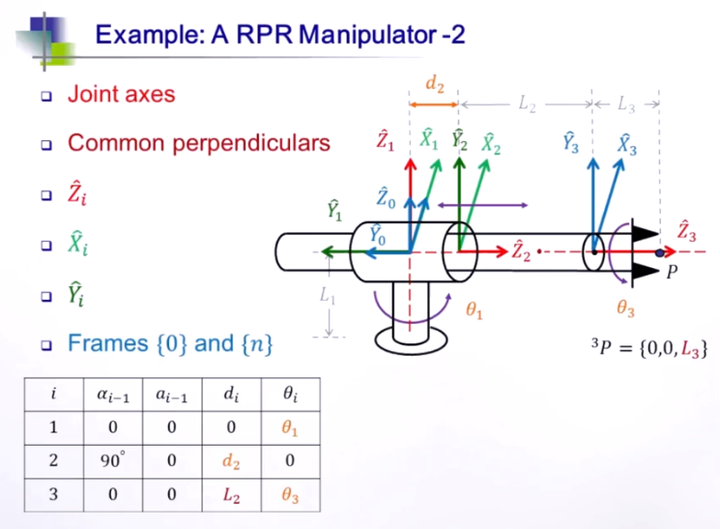
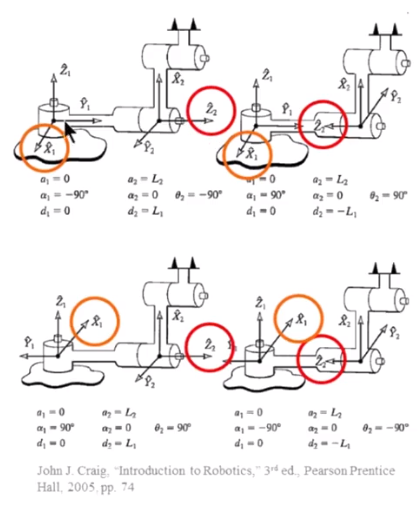
Example 3: A RPR Manipulator
注意,当Z轴相交,即
的时候,有很多定义方式:
有两个选择
有两个选择
- 单纯的两轴相交,就有4种选择,不是唯一解...


评论(0)
您还未登录,请登录后发表或查看评论