

0. 简介
本文档用于记录现ROS1与ROS2之间的区别,以及如何向ROS2移植。整体架构基于该文章
ROS2的教程参见:https://docs.ros.org/en/ros2_packages/rolling/api/
1 工程构建
1.1 CMakeList的编写
ROS2采用ament cmake系统,最主要的区别是原先的catkin Cmake宏被取代
find_package(catkin REQUIRED COMPONENTS
...)
catkin_package(
INCLUDE_DIRS
LIBRARIES
CATKIN_DEPENDS)
add_library(controller src/controller.cpp)
add_dependencies(obot_controller obot_msgs_generate_messages_cpp)
install(TARGETS
obot_controller
obot_controller_node
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
############################################ 改变为
find_package(ament_cmake REQUIRED)
find_package(... REQUIRED)
ament_export_include_directories(include)# 标记导出的include目录对应的目录(这是通过目标install调用中的INCLUDES DESTINATION来实现)。
ament_export_libraries(my_library)# 标记安装的库的位置(这是由ament_export_targets调用中的HAS_LIBRARY_TARGET参数来完成)
ament_export_dependencies(some_dependency)
ament_target_dependencies(${PROJECT_NAME} ${DEPS})
ament_package()
install(TARGETS ${PROJECT_NAME}_node
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin)
若想构建一个兼容ROS1/2的CMakeList.txt,在不同ROS版本有区别的部分通过环境变量触发条件编译
if($ENV{ROS_VERSION} EQUAL 2)
########################
## BULD VERSION: ROS2 ##
########################
else()
########################
## BULD VERSION: ROS1 ##
########################
endif()
1.2 package.xml
<buildtool_depend>catkin</buildtool_depend>
<!--对应的包-->
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
<!--##################-->
<buildtool_depend>ament_cmake</buildtool_depend>
<build_type>ament_cmake</build_type>
<!--对应的包-->
<build_export_depend>rclpy</build_export_depend>
<exec_depend>rclpy</exec_depend>
若想构建一个兼容ROS1/2的package.xml,在不同ROS版本有区别的部分通过环境变量设置条件
<export>
<build_type condition="$ROS_VERSION == 1">catkin</build_type>
<build_type condition="$ROS_VERSION == 2">ament_cmake</build_type>
</export>
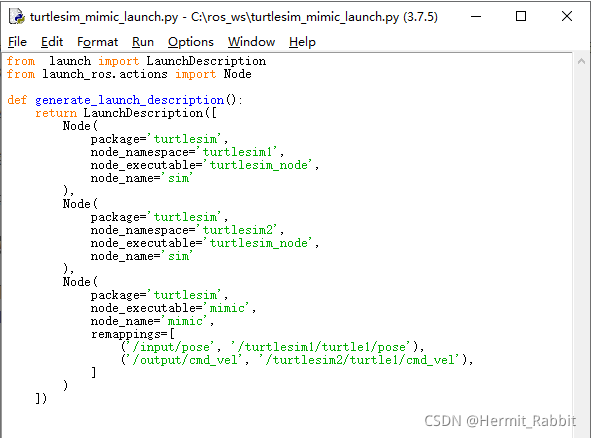
1.3 launch 文件
ROS2较ROS1,在launch方面进行了比较大的改动。原先ROS1是使用xml格式来编写launch文件,而ROS2却是用python来编写launch文件.
# 导入库
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
import os
# 定义函数名称为:generate_launch_description
def generate_launch_description():
ns = os.environ.get('ROBOT_ID')##read namespace from env
return LaunchDescription([
Node(
# 创建Node对象fusion_localizer_node,标明所在位置fusion_localizer,将可执行文件重命名为fusion_localizer_nodes,同时可以将运行节点node放在同一个自定义的命名空间ns当中。
package='fusion_localizer',
namespace=ns,
executable='fusion_localizer_node',
name='fusion_localizer_nodes',
parameters,
),
])
##少量parameters也可以用以下方法
parameters=[ {'use_sim_time': True},
{'lane_filename': "tianjin_special_lanes.yaml"},
{'qc_info_topic': "/b_info"},
{'service_lane_in_buffer': 3.0}]
或者通过以下办法来实现多个节点的调用
def generate_launch_description():
# 创建Actions.Node对象li_node,标明李四所在位置
li4_node = Node(
package="village_li",
executable="li4_node"
)
# 创建Actions.Node对象wang2_node,标明王二所在位置
wang2_node = Node(
package="village_wang",
executable="wang2_node"
)
# 创建LaunchDescription对象launch_description,用于描述launch文件
launch_description = LaunchDescription([li4_node,wang2_node])
# 返回让ROS2根据launch描述执行节点
return launch_description
对于ROS1而言,launch文件的编写则比较简单
<launch>
<node pkg="beginner1" name="tempspeak" type="speak" output="screen">
<remap from="speaker" to="listener"/>
</node>
<node pkg="beginner1" name="templisten" type="listen" output="screen">
<remap from="listener" to="listener"/>
</node>
<group ns="demo_1">
<node name="demo_1" pkg="demo_1" type="demo_pub_1" output="screen"/>
<node name="demo_1" pkg="demo_1" type="demo_sub_1" output="screen"/>
</group>
<group ns="demo_2">
<node name="demo_2" pkg="demo_2" type="demo_pub_2" output="screen"/>
<node name="demo_2" pkg="demo_2" type="demo_sub_2" output="screen"/>
</group>
<rosparam file="***.yaml" command="load" ns="XXX">
</launch>
1.4 parameter参数
我们可以在1.3中看到在launch文件中同样可以对parameter进行少量的赋值,但是大量的parameter参数则是需要通过yaml文件来进行读取
launch形式
# 导入库
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
import os
# 定义函数名称为:generate_launch_description
def generate_launch_description():
para_dir = os.path.join(get_package_share_directory('fusion_localizer'), 'config', 'turtlesim.yaml')##yaml file contains parameters
ns = os.environ.get('ROBOT_ID')##read namespace from env
return LaunchDescription([
Node(
# 创建Node对象fusion_localizer_node,标明所在位置fusion_localizer,将可执行文件重命名为fusion_localizer_nodes,同时可以将运行节点node放在同一个自定义的命名空间ns当中。
package='fusion_localizer',
namespace=ns,
executable='fusion_localizer_node',
name='fusion_localizer_nodes',
parameters=[para_dir]
),
])
命令行形式
ros2 run turtlesim turtlesim_node --ros-args --params-file ./turtlesim.yaml
在ROS2中yaml文件格式则是不一样的:第一层为你的namespace,第二层为你的node_name,第三层为ros__parameters,该层名称为固定不可修改的,第四层为具体的参数,接收包括int, double, bool, string等类型。同一namespace的node应放置于同一层相邻。
your_node_namespace:
your_node_name_1:
ros__parameters:
ip: "192.168.0.10"
port: 12002
output: false
your_node_name_2:
ros__parameters:
subscribe_topic: "/node_namespace_1/topic"
而在ROS1中则是很简单的yaml格式,直接是namespace层(可省略)对应的具体的参数。
local_costmap:
global_frame: odom
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 5.0
transform_tolerance: 0.5
同时,在ROS1中,Parameter参数机制默认是无法实现动态监控的(需要配合专门的动态机制),比如正在使用的参数被其他节点改变了,如果不重新查询的话,就无法确定改变之后的值。ROS2最新版本中添加了参数的事件触发机制ParameterEventHandler, 当参数被改变后,可以通过回调函数的方式,动态发现参数修改结果。这里古月老师讲的很详细了,具体参照这篇文章。
2 代码移植
ROS2中有较多细节上的变化,开始coding之前应当注意。尤其是ROS2代码编写中节点通讯、文件中include调用msg、namespace有变化:
2.1 Node
ROS2中实现了rclcpp::Node类,因此功能节点的实现采用主要的类继承Node的方式,不再需要维护node handle。而Node类提供了clock、time、logger、create publisher/subscriber/timer/server/client 等一系列功能。参考链接:
https://docs.ros2.org/beta3/api/rclcpp/classrclcpp_1_1node_1_1Node.html
2.1.1 publisher/subscriber
在继承了Node的类中声明publisher/subscriber的智能指针成员
rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr my_sub_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr my_pub_;
在类构造函数中创建publisher/subscriber,在create_subscription中使用std::bind或者lambda表达式构造调用对象Callback,当然是用ROS1的方式也可以编写简单的ROS1程序,只是ROS2已经趋向推荐面向对象编程了。
my_pub_ = this->create_publisher<std_msgs::msg::String>("/localization_permutation", 10);
//--------------------create_subscription-----------------------------
my_sub_ = this->create_subscription<nav_msgs::msg::Odometry>(
localization_topic, 1,
std::bind(&LocalizationSwitchboard::localizationCallback,
this, std::placeholders::_1));
//或者
my_sub_ = this->create_subscription<nav_msgs::msg::Odometry>(
localization_topic, 1,
[this](const nav_msgs::msg::Odometry::ConstPtr msg)
{localizationCallback(msg)};
//--------------------/create_subscription-----------------------------
//callback function
void LocalizationSwitchboard::localizationCallback(const nav_msgs::msg::Odometry::ConstPtr msg){
//do stuff
}
示例
#include "rclcpp/rclcpp.hpp"
/*
创建一个类节点,名字叫做SingleDogNode,继承自Node.
*/
class SingleDogNode : public rclcpp::Node
{
public:
// 构造函数,有一个参数为节点名称
SingleDogNode(std::string name) : Node(name)
{
// 打印一句自我介绍
RCLCPP_INFO(this->get_logger(), "大家好,我是单身狗%s.",name.c_str());
}
private:
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个Wang2的节点*/
auto node = std::make_shared<SingleDogNode>("wang2");
/* 运行节点,并检测退出信号*/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
2.1.2 service/client
在继承了Node的类中声明service/client的智能指针成员
rclcpp::Service<std_srvs::srv::SetBool>::SharedPtr switch_srv_;
rclcpp::Client<std_srvs::srv::SetBool>::SharedPtr ndt_client_;
在类构造函数中创建service/client
auto callback_ = std::bind(&LandMarkLocalizer::SwitchService, this, std::placeholders::_1, std::placeholders::_2);
switch_srv_ = this->create_service<std_srvs::srv::SetBool>("ndt_lidar_localizer/switch",
callback_);
ndt_client_ = this->create_client<std_srvs::srv::SetBool>("ndt_lidar_localizer/switch");
service端部分对request的处理方式与ros1一致,但client端发送请求获得反馈的方式有变化。
ROS1中常用的client.call(srv)方式不再被ROS2支持,转而使用client->async_send_request(rquest)的异步方式。这种方式会返回一个std::future类型的变量用于检测是否已经获得回应。
在实际移植过程中发现,一个常见的使用场景:client在原地阻塞式的等待request结果将会造成死锁。原因是因为ROS2中也是默认每一个Node都是一个进程。哪怕不显式的注册,async_send_request也会有一个callback用来接收response。这样就造成了在timer callback中等待会在其他callback中到达的response。而ROS2中若不采用多线程、multi callback group的spin方式,各个callback间采用单线程轮询调度,get()会阻塞当前线程,async_send_request的callback就永远无法被调用。解决方式就是采用多线程、multi callback group的方式spin。这里我们可以使用r.wait_for(1s);来有效避免延迟导致的问题。
auto r = ins_client->async_send_request(new_req_ptr, visual_lane_tracker_on_client_callback);
auto status = r.wait_for(1s);
if (status != std::future_status::ready) RCLCPP_ERROR_STREAM(this->get_logger(),"Time out waiting for response: " << name);
示例服务端
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"
#include <memory>
void add(const std::shared_ptr<example_interfaces::srv::AddTwoInts::Request> request,
std::shared_ptr<example_interfaces::srv::AddTwoInts::Response> response)
{
response->sum = request->a + request->b;
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Incoming request\na: %ld" " b: %ld",
request->a, request->b);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "sending back response: [%ld]", (long int)response->sum);
}
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_server");
rclcpp::Service<example_interfaces::srv::AddTwoInts>::SharedPtr service =
node->create_service<example_interfaces::srv::AddTwoInts>("add_two_ints", &add);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Ready to add two ints.");
rclcpp::spin(node);
rclcpp::shutdown();
}
示例客户端
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"
#include <chrono>
#include <cstdlib>
#include <memory>
using namespace std::chrono_literals;
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
if (argc != 3) {
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "usage: add_two_ints_client X Y");
return 1;
}
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_client");
rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedPtr client =
node->create_client<example_interfaces::srv::AddTwoInts>("add_two_ints");
auto request = std::make_shared<example_interfaces::srv::AddTwoInts::Request>();
request->a = atoll(argv[1]);
request->b = atoll(argv[2]);
while (!client->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Interrupted while waiting for the service. Exiting.");
return 0;
}
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "service not available, waiting again...");
}
auto result = client->async_send_request(request);
// Wait for the result.
if (rclcpp::spin_until_future_complete(node, result) ==
rclcpp::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Sum: %ld", result.get()->sum);
} else {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Failed to call service add_two_ints");
}
rclcpp::shutdown();
return 0;
}
2.1.3 Action
action在发布和接收层面均没有太大的变化,但是整体结构基本发生了变化,这部分从ROS1转到ROS2建议直接对着官方文档重写。
示例服务端
#include <inttypes.h>
#include <memory>
#include "example_interfaces/action/fibonacci.hpp"
#include "rclcpp/rclcpp.hpp"
// TODO(jacobperron): Remove this once it is included as part of 'rclcpp.hpp'
#include "rclcpp_action/rclcpp_action.hpp"
// 创建一个ActionServer类
class MinimalActionServer : public rclcpp::Node
{
public:
using Fibonacci = example_interfaces::action::Fibonacci;
using GoalHandleFibonacci = rclcpp_action::ServerGoalHandle<Fibonacci>;
explicit MinimalActionServer(const rclcpp::NodeOptions & options = rclcpp::NodeOptions())
: Node("minimal_action_server", options)
{
using namespace std::placeholders;
this->action_server_ = rclcpp_action::create_server<Fibonacci>(
this->get_node_base_interface(),
this->get_node_clock_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"fibonacci",
std::bind(&MinimalActionServer::handle_goal, this, _1, _2),
std::bind(&MinimalActionServer::handle_cancel, this, _1),
std::bind(&MinimalActionServer::handle_accepted, this, _1));
}
private:
rclcpp_action::Server<Fibonacci>::SharedPtr action_server_;
rclcpp_action::GoalResponse handle_goal(
const rclcpp_action::GoalUUID & uuid,
std::shared_ptr<const Fibonacci::Goal> goal)
{
RCLCPP_INFO(this->get_logger(), "Received goal request with order %d", goal->order);
(void)uuid;
// Let's reject sequences that are over 9000
if (goal->order > 9000) {
return rclcpp_action::GoalResponse::REJECT;
}
return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE;
}
rclcpp_action::CancelResponse handle_cancel(
const std::shared_ptr<GoalHandleFibonacci> goal_handle)
{
RCLCPP_INFO(this->get_logger(), "Received request to cancel goal");
(void)goal_handle;
return rclcpp_action::CancelResponse::ACCEPT;
}
void execute(const std::shared_ptr<GoalHandleFibonacci> goal_handle)
{
RCLCPP_INFO(this->get_logger(), "Executing goal");
rclcpp::Rate loop_rate(1);
const auto goal = goal_handle->get_goal();
auto feedback = std::make_shared<Fibonacci::Feedback>();
auto & sequence = feedback->sequence;
sequence.push_back(0);
sequence.push_back(1);
auto result = std::make_shared<Fibonacci::Result>();
for (int i = 1; (i < goal->order) && rclcpp::ok(); ++i) {
// Check if there is a cancel request
if (goal_handle->is_canceling()) {
result->sequence = sequence;
goal_handle->canceled(result);
RCLCPP_INFO(this->get_logger(), "Goal Canceled");
return;
}
// Update sequence
sequence.push_back(sequence[i] + sequence[i - 1]);
// Publish feedback
goal_handle->publish_feedback(feedback);
RCLCPP_INFO(this->get_logger(), "Publish Feedback");
loop_rate.sleep();
}
// Check if goal is done
if (rclcpp::ok()) {
result->sequence = sequence;
goal_handle->succeed(result);
RCLCPP_INFO(this->get_logger(), "Goal Succeeded");
}
}
void handle_accepted(const std::shared_ptr<GoalHandleFibonacci> goal_handle)
{
using namespace std::placeholders;
// this needs to return quickly to avoid blocking the executor, so spin up a new thread
std::thread{std::bind(&MinimalActionServer::execute, this, _1), goal_handle}.detach();
}
}; // class MinimalActionServer
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto action_server = std::make_shared<MinimalActionServer>();
rclcpp::spin(action_server);
rclcpp::shutdown();
return 0;
}
示例客户端
#include <inttypes.h>
#include <memory>
#include <string>
#include <iostream>
#include "example_interfaces/action/fibonacci.hpp"
#include "rclcpp/rclcpp.hpp"
// TODO(jacobperron): Remove this once it is included as part of 'rclcpp.hpp'
#include "rclcpp_action/rclcpp_action.hpp"
class MinimalActionClient : public rclcpp::Node
{
public:
using Fibonacci = example_interfaces::action::Fibonacci;
using GoalHandleFibonacci = rclcpp_action::ClientGoalHandle<Fibonacci>;
explicit MinimalActionClient(const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions())
: Node("minimal_action_client", node_options), goal_done_(false)
{
this->client_ptr_ = rclcpp_action::create_client<Fibonacci>(
this->get_node_base_interface(),
this->get_node_graph_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"fibonacci");
this->timer_ = this->create_wall_timer(
std::chrono::milliseconds(500),
std::bind(&MinimalActionClient::send_goal, this));
}
bool is_goal_done() const
{
return this->goal_done_;
}
void send_goal()
{
using namespace std::placeholders;
this->timer_->cancel();
this->goal_done_ = false;
if (!this->client_ptr_) {
RCLCPP_ERROR(this->get_logger(), "Action client not initialized");
}
if (!this->client_ptr_->wait_for_action_server(std::chrono::seconds(10))) {
RCLCPP_ERROR(this->get_logger(), "Action server not available after waiting");
this->goal_done_ = true;
return;
}
auto goal_msg = Fibonacci::Goal();
goal_msg.order = 10;
RCLCPP_INFO(this->get_logger(), "Sending goal");
auto send_goal_options = rclcpp_action::Client<Fibonacci>::SendGoalOptions();
send_goal_options.goal_response_callback =
std::bind(&MinimalActionClient::goal_response_callback, this, _1);
send_goal_options.feedback_callback =
std::bind(&MinimalActionClient::feedback_callback, this, _1, _2);
send_goal_options.result_callback =
std::bind(&MinimalActionClient::result_callback, this, _1);
auto goal_handle_future = this->client_ptr_->async_send_goal(goal_msg, send_goal_options);
}
private:
rclcpp_action::Client<Fibonacci>::SharedPtr client_ptr_;
rclcpp::TimerBase::SharedPtr timer_;
bool goal_done_;
void goal_response_callback(std::shared_future<GoalHandleFibonacci::SharedPtr> future)
{
auto goal_handle = future.get();
if (!goal_handle) {
RCLCPP_ERROR(this->get_logger(), "Goal was rejected by server");
} else {
RCLCPP_INFO(this->get_logger(), "Goal accepted by server, waiting for result");
}
}
void feedback_callback(
GoalHandleFibonacci::SharedPtr,
const std::shared_ptr<const Fibonacci::Feedback> feedback)
{
RCLCPP_INFO(
this->get_logger(),
"Next number in sequence received: %" PRId32,
feedback->sequence.back());
}
void result_callback(const GoalHandleFibonacci::WrappedResult & result)
{
this->goal_done_ = true;
switch (result.code) {
case rclcpp_action::ResultCode::SUCCEEDED:
break;
case rclcpp_action::ResultCode::ABORTED:
RCLCPP_ERROR(this->get_logger(), "Goal was aborted");
return;
case rclcpp_action::ResultCode::CANCELED:
RCLCPP_ERROR(this->get_logger(), "Goal was canceled");
return;
default:
RCLCPP_ERROR(this->get_logger(), "Unknown result code");
return;
}
RCLCPP_INFO(this->get_logger(), "Result received");
for (auto number : result.result->sequence) {
RCLCPP_INFO(this->get_logger(), "%" PRId32, number);
}
}
}; // class MinimalActionClient
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto action_client = std::make_shared<MinimalActionClient>();
while (!action_client->is_goal_done()) {
rclcpp::spin_some(action_client);
}
rclcpp::shutdown();
return 0;
}
2.2 Timer
在类中声明TimerBase的智能指针成员
rclcpp::TimerBase::SharedPtr timer_;
有两种方式实例化timer,区别是时钟源
//wall timer使用系统时间
timer_ = this->create_wall_timer(std::chrono::milliseconds(100), std::bind(&LandMarkLocalizer::LandmarkThread, this));
//抽象化的timer,可以自定义时钟源。此处给的是node clock 即ros clock,在调试时可以使用仿真时间
landmark_timer_ = rclcpp::create_timer(this, this->get_clock(), std::chrono::milliseconds(100),std::bind(&LandMarkLocalizer::LandmarkThread, this));
2.3 Parameters
注意在代码中访问nested params应采用”.”作为层级分割符,而不是“/”
//定义名字为odom/topic_name的参数默认值为odom0里面的值
ros_node_->declare_parameter("odom.topic_name", rclcpp::ParameterValue("odom0"));
ros_node_->get_parameter("odom.topic_name", temp,1);//无法获取时用默认值
可参考: https://roboticsbackend.com/ros2-yaml-params/
示例
#include <rclcpp/rclcpp.hpp>
#include <chrono>
#include <string>
#include <functional>
using namespace std::chrono_literals;
class ParametersClass: public rclcpp::Node
{
public:
ParametersClass()
: Node("parameter_node")
{
this->declare_parameter<std::string>("my_parameter", "world");
timer_ = this->create_wall_timer(
1000ms, std::bind(&ParametersClass::respond, this));
}
void respond()
{
this->get_parameter("my_parameter", parameter_string_);
RCLCPP_INFO(this->get_logger(), "Hello %s", parameter_string_.c_str());
}
private:
std::string parameter_string_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<ParametersClass>());
rclcpp::shutdown();
return 0;
}
3 ROS2在调用层面的变化
3.1 msg/srv namespace和头文件的变化
#include <nav_msgs/Odometry.h>
#include <std_srvs/SetBool.h>
#include <std_msgs/Int32.h>
<std_srvs::SetBool>
<std_msgs::String>
//-------------变为----------------------
#include <nav_msgs/msg/odometry.hpp>
#include <std_srvs/srv/set_bool.hpp>
#include <std_msgs/msg/int32.hpp>
<std_srvs::srv::SetBool>
<std_msgs::msg::String>
3.2 LOG的变化
在打印log之前先获取logger
ROS_INFO("...");
-----------------
RCLCPP_INFO(this->get_logger(),"...")
3.3 时间(戳)的变化
ROS2中msg不再支持ROS1中的基本类型time,因此所有相关时间戳使用builtin_interfaces/Time类型替代
//从时间戳获取浮点型的时间,先利用stamp构造rclcpp::Time对象
double stamp = rclcpp::Time(sensor_data->dji_points->header.stamp).seconds();
//获取当前时间
double start_stamp = this->now().seconds();
4. 参考链接
https://www.guyuehome.com/35373
https://github.com/yszheda/wiki/wiki/ros2
http://blog.chinaunix.net/uid-27875-id-5834655.html
https://blog.csdn.net/yang434584531/article/details/115749810
http://blog.chinaunix.net/uid-27875-id-5834655.html
https://blog.csdn.net/flyfish1986/article/details/82986168

评论(0)
您还未登录,请登录后发表或查看评论