

本节介绍拉格朗日方程的首次积分,前面介绍的拉格朗日方程需要求两次导数,但在某些情况下,拉格朗日方程可以进行一次积分,减小计算量,这也是哈密顿力学的简单铺垫。
5. 拉格朗日方程的首次积分
对于保守系统,可以得到拉格朗日方程的某些统一形式的首次积分,从而使得保守系统动力学问题的求解过程进一步简化。首次积分分为能量积分和循环积分两种。
能量积分
如果拉格朗日函数中不显含时间 ,则
根据保守场的拉格朗日方程,可得
因此
即
故
将上式称为广义能量积分。
接下来我们分析质点系动能的构成
上式三项从左到右分别为:广义速度的二次齐次函数 、广义速度的一次齐次函数
、广义速度的零次齐次函数
,即有
这就是质点系的动能构成。
我们补充齐次函数的欧拉定理:
齐次函数:
若,把
称为
次齐次函数。
欧拉定理:
若函数。
根据齐次方程的欧拉定理,我们可以写出
那么,由于 ,有
因此有
这就是拉格朗日方程积分得到的广义能量守恒,当拉格朗日函数不显含时间 时,保守系统的广义能量守恒。
若质点系所受的都是定常约束, ,此时有
原守恒式变为 ,此为机械能守恒式。
循环积分
如果拉格朗日函数 中不显含某一广义坐标
,则将该坐标称为循环坐标或可遗坐标。当
为系统的循环坐标时,有
则拉格朗日方程为:
积分得
将上式称为循环积分;事实上
将 称为广义动量,上式表示保守系统对应于循环坐标的广义动量守恒。
例2-5. 如图2-6所示,一个小球在光滑旋转圆环上滑动,圆环的转角设为 ,试写出其运动方程,以及拉格朗日方程的首次积分式。
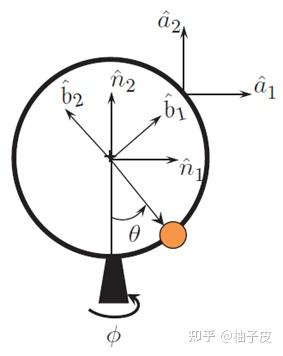
解:
首先,我们定义旋转系 与旋转系
,如图所示,有:
其中 表示
系相对惯性系
的角速度。可以写出小球的速度:
其中 表示在惯性系
下,小球(记为
)相对于惯性系原点(记为
)的速度。由此可写出动能与势能:
拉格朗日函数:
可以发现拉格朗日函数并不显含广义坐标 与时间
。列写保守场的拉格朗日方程:
广义坐标 :
广义坐标 :
这两式即运动方程,接下来计算拉格朗日方程的首次积分。由于拉格朗日函数不显含时间 ,有能量积分:
这实际上是系统的机械能守恒式,可以根据系统约束为定常约束直接列写。
由于拉格朗日函数不显含广义坐标 ,有循环积分:
这就是系统关于广义坐标 的广义动量守恒式,我们可以发现,其具有角动量的形式,实际上,这是角动量守恒式在
方向的分量。
之前内容:
参考文献:F. Daqaq. Dynamics of particles and rigid bodies: a self-learning approach[M]. Hoboken, NJ: John Wiley & Sons, 2018.




评论(0)
您还未登录,请登录后发表或查看评论