
在Ubuntu20.04.1中安装PyBullet(VMware Workstation 16.x Pro)
1. 安装 “PyBullet”
2. Hello PyBullet World
申明:本人今年博一(地点英国),项目是与机器人有关的内容。第二次导师见面,导师让我做一个mini-experiment,用到“PyBullet”。下面的安装过程是一次性成功的,现在分享一下整个安装过程。
系列文章目录:
下一篇:
PyBullet (二) 机器人手臂的简单移动
虚拟机:VMware Workstation 16.x Pro
系统:Ubuntu20.04.1(官方下载链接)
PyBullet:(官方链接)(官方指南)
1. 安装 “PyBullet”
进入系统界面,打开黑窗,输入:
pip3 install PyBullet
然后等待安装即可。
如果是新系统可能会报错,新系统中没有“pip3”指令。这时候系统会自动给你安装建议,按照黑窗口的提示来安装即可。
2. Hello PyBullet World
现在我们来运行你的第一个机器人仿真程序。
其实想要运行“第一个”程序可以直接在黑窗窗输入。
但是作为一个早已经被智能编程软件洗礼的孩子,直接输入看起来非常难受。所以我选择稍微麻烦一点方法。
在你的系统里随便找到一个“.py”文件,然后把这个软件复制粘贴到你想要储存“PyBullet”代码的文件夹中,然后编辑这个“.py”文件。e.g. Hello PyBullet World.py。打开这个文件之后把原来的内容删掉,然后复制粘贴如下代码,然后保存。(代码具体内容以后再详细介绍,毕竟是初学者,请观众老爷们手下留情)
import pybullet as p
import time
import pybullet_data
physicsClient = p.connect(p.GUI)#or p.DIRECT for non-graphical version
p.setAdditionalSearchPath(pybullet_data.getDataPath()) #optionally
p.setGravity(0,0,-10)
planeId = p.loadURDF("plane.urdf")
cubeStartPos = [0,0,1]
cubeStartOrientation = p.getQuaternionFromEuler([0,0,0])
boxId = p.loadURDF("r2d2.urdf",cubeStartPos, cubeStartOrientation)
for i in range (10000):
p.stepSimulation()
time.sleep(1./240.)
cubePos, cubeOrn = p.getBasePositionAndOrientation(boxId)
print(cubePos,cubeOrn)
p.disconnect()
保存关闭之后,回到桌面,打开黑窗口。然后用“cd”命令找到“Hello PyBullet World.py”所在位置。(博主比较懒,所以直接把文件放到桌面上了)
然后在该目录下输入:
python3 Hello\ PyBullet\ World.py
由于我的命名中带有空格,所以命令会用“\空格”来表示,大家到时候留意自己的命名就好。实在不行,到了储存“.py”文件的目录下之后、输入“python3”+空格之后,直接按“Tab”键就好。“Tab”键可以根据目录下的内容进行检索唯一指定文件,所以还是很简单的。
运行代码之后就可以出现如下图所示的内容: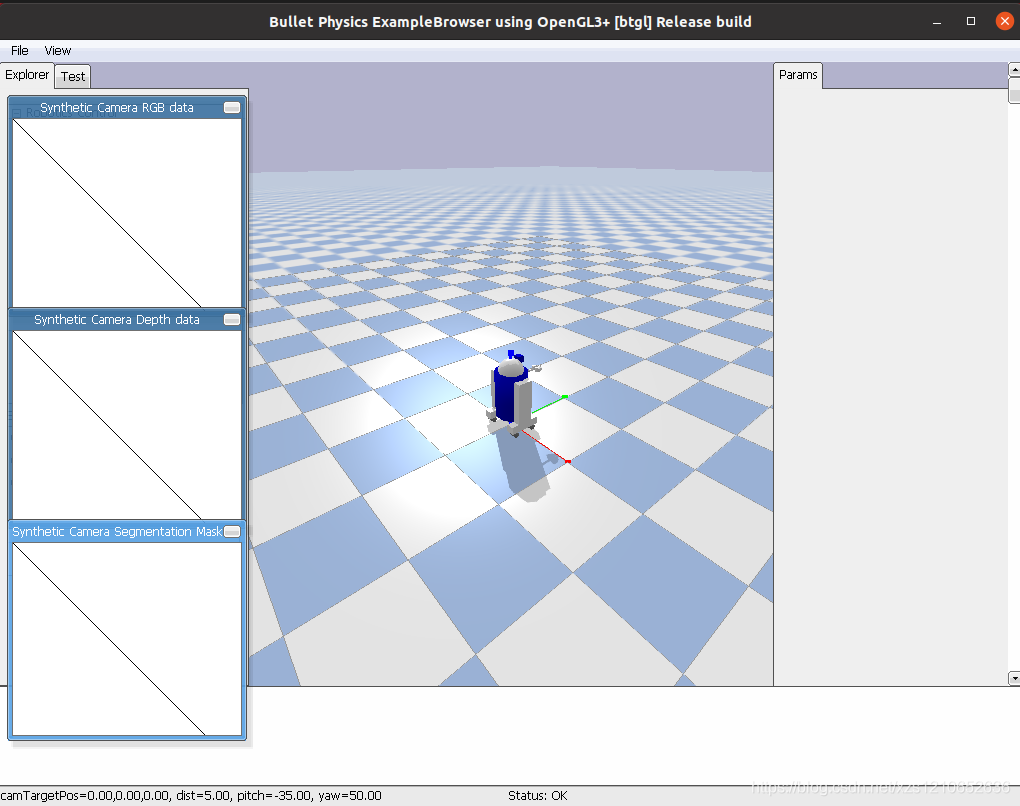
后续学习内容我一会慢慢逐一完成发布到博客里,希望大家共同进步,有问题想要讨论的尽管发在评论区。由于我是初学者,可能有好多问题我也不会,到时候大家一起讨论,共同进步!!!




评论(0)
您还未登录,请登录后发表或查看评论