

Moco-ML为8自由度并联腿结构参考Minitaur 的硬件数据其采用T-Motor U8电机(重量280g持续扭矩3Nm价格1000RMB)整机重量为4Kg,无法满足桌面级的需求,除了太重外其整机成本也没法约束在5000RMB内,参考相关低成本电机参数Moco-ML的总体参数相比Minitaur 均缩小一倍吗,即整机重量在2Kg,站立高度在10cm,尺寸小于50*40cm,对于自制四足机器人来说最大的困难可以说是选择一个合适伺服驱动器,目前国外有很多开源驱动器如:
(1)VESC:本杰明电调,主要用于电动滑板,电流功率大,但早期估计对低转速力矩控制支持较差,采购价格>600RMB;
(2)SimpleFOC:最近出现的一个FOC驱动项目,完全开源算法简单,采用电压力矩控制类似DJI减速电机,功率小由于没有电流反馈类似开环力矩控制,无法直接使用力反馈估计,采购价格>300RMB;
(3)MIT电机驱动器:MIT开源方案中的驱动器,完全开源并接受过长时间的测试,体积小能直接安装在电机背面,但需要自己加工存在风险,淘宝也没有现成的成品套件;
(4)ODrive:高性能伺服驱动器,早期被用于3D打印和CNC设备中,近年来国外很多机器人都采用其作为驱动器,功率大、可靠性高,国内也有很多加工厂商,唯一的问题是不支持绝对是编码器,上电标定和配置复杂有一点劝退作用,另外尺寸较大无法直接集成在电机背后,采购价>380RMB双驱动;
综上,参考Dogggo的设计ODrive是一个不错的选择,唯一需要解决的就是上电自动标定需要电机转动和通讯配置复杂的问题。在确定驱动器后需要进一步依据机器人性能需求选择相应的电机,由于采用的直驱动方式其对电机力矩和散热能力都有较高要求,参考Minitaur 和Doggo的电机性能参数如下:

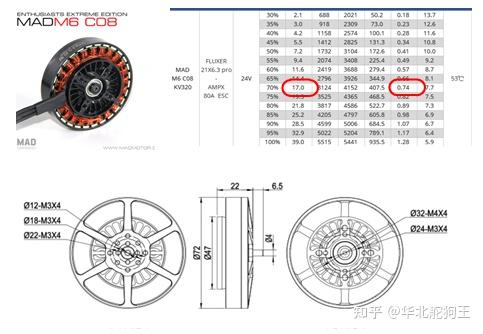
从上表可知满足Minitaur 那样高性能直驱的四足机器人采用T-Motor电机其持续扭矩在1.51Nm左右,Moco-ML设计性能为其一半因此简单认为其持续扭矩需求为0.7Nm,则下面给出几个我调研性价比满足设计需求的国内电机选择:
(1)MADM6 (17A-> 0.74Nm) 800RMB 189g 75mm直径:
(2)EAGLEPOWER UA80(17A-> 1.59Nm) 900RMB 289g 85mm直径:

(3)EAGLEPOWER UA90(17A->1.62Nm) 900RMB 368g 90mm直径:

(4)X8308(17A->2.06Nm) 550RMB 279g 90mm直径:

(5)X5048 (17A->0.6Nm) 248RMB 168g 60mm直径:

上面几款扭矩都满足之前的需求,但前几个尺寸较大适合制作原始大小Minitaur 的机器人,而且部分电机价格还是较高,如需要还是推荐从咸鱼采购二手和拆机的T-motor U8电机,这里最终选择X5048 电机,实际电机选择除了考虑扭矩外还需要考虑直径、重量和厚度,其尺寸大小将决定机器人腿组件的宽度,过大将导致后续机器人宽度很大,对于8自由度机器人来说其转向难度也会变大,机器人电机重量太大将影响其姿态控制的响应速度。
对于四足机器人关节电机来说分为直驱和准直驱,前者即没有减速器电机直接带动各腿也是Minitaur机器人采用的方案,而通常情况下可以把减速比小于1:9的关节电机都作为准直驱也就是可以忽略减速器对力矩控制反馈带来的影响和滞后,这也是MIT采用1:6减速比例的一个原因,在Minitaur 课题组相关论文中也给出了直驱DD的几个优缺点:
传动性能:DD驱动器能避免减速器和机构的回差,具有高的结构刚度,没有了减速器摩擦的影响能具有非常高的动态相应性能,同时也能非常灵敏的检测出外部力,对估计着地状态来说十分有利;
机构性能:由于没有减速器在机构可靠性上较高,传动也没有由于减速器或机构带来较大损失,对于基于动力学的控制来说十分有利,如基于拉格朗日建立的运动学模型相匹配精度也很高;
高控制带宽:对控制信号的输出不会有较大的滤波效果,因此也没有响应滞后,对于复杂地形移动来说十分有利;
功率大、发热大:由于没有减速器,为保证足够的力矩需要较大的功率,因此发热和功率较大,对电机散热和电池续航带来影响;

在单腿设计中可以参考国外其他项目和一些大学的设计,首先电机同样需要同轴还是采用Minitaur 标准的两电机面对面设计,同时需要保证电机两者的间距最小,并且能容纳4个腿结构件的宽度并留有一些垫片的余量。
总结下直驱并联腿的设计:
并联腿结构保证同轴:对于并联腿来说我个人建议同轴设计,虽然这样会导致单腿组机构变宽,在Robotcon等比赛中很多8自由度并联机器人实际采用的结构如下图,这样虽然利于布局,但实际的机构是一个闭式5连杆如忽略量电机中轴间距则对足端的位置解算精度会大大降低,同时这样布局单腿也没法360度旋转,Minitaur 最大的优点是具有工业可靠性设计机器人正反面都可以移动,下楼梯靠步态没法实现,我摔下去再站起来就行,非常符合工业和军工的低成本平台设计需求,而这就需要360度的单腿旋转,采用非同轴设计就没了这个优势,那8自由度机器人也就只能作为一个自己兴趣爱好或者DIY研究算法的平台了;

腿部组宽度尽量最小间距:在同轴设计的前提下,需要进一步保障两电机间距最小,这里采用的是非Doggo传动同轴的方案,如采用直驱方式的话需要保证量电机间有2个大腿、2个小腿结构的宽度,各关节连接最好增加滑环保证完全拧紧的前提下各关节选择无阻力,否则即无法保证足端左右不晃动,也没法避免安装完成带来各腿阻力不一样;
同轴轴心加固:考虑两电机同轴时有一侧为开发结构,此时如电机固定结构刚度不够将导致支持时结构扭动,造成两个电机的轴心不在重合,因此可以参考国外大学改进设计中在量电机轴线在增加连接的方式提高整体刚度;



评论(0)
您还未登录,请登录后发表或查看评论