


大部分工程问题到最后都会转化为一个数学问题,控制领域也不例外。经典控制领域,我们费尽心思进行了各种样的变换和计算,最终都是为了得到常微分方程的解。
那为什么常微分方程的解这么重要呢?根本原因是现实中的系统、现象、亦或物理规律,大都可以用常微分方程来描述。系统的表现、现象的变化规律的演化都与方程的解息息相关。
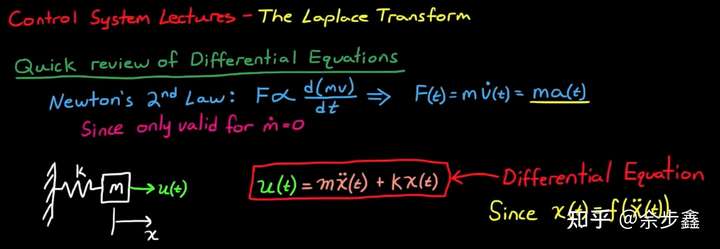
举一个拉弹簧的例子。根据牛二定律,很容易写出作用力F,与物块位移x的关系。它们都是关于时间的t的函数,但我们解出方程的解x(t)时自然就知晓了物块的轨迹。
那么这与控制有什么关系呢?
实际上,在进行拉普拉斯变换前,我们所面对的就是描述系统的偏微分方程。拉普拉斯变换仅仅是为了获取常微分方程解,而采用的一种数学方法。最终的落脚点还是方程的解,我们通过解预测和判断系统的表现。
控制中的稳定指系统在受到扰动后还能回归到平衡点。具体的表现就是:扰动量的系统响应随着时间的增长最后会归零。而扰动量的系统响应就与常微分方程的解联系到一起。
经典控制理论里遇到的常微分方程解有着统一的形式: ,它表示着扰动响应随时间的变化。而t前面的系数a决定了最终的稳定结果,具体如下:
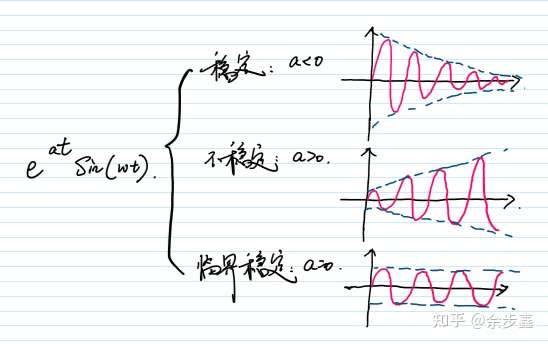
如果a<0,那系统必然稳定,扰动响应最终归于0,并且 a 的绝对值越大,衰减的也越快。因此,a 不仅决定系统的稳定性,还会影响系统的动态响应性能。
综上,控制理论中的一系列操作,稳定性判定,系统矫正等归根结底都是围绕着方程的解展开,因为微分方程才是最终的Boss,它的解才能定乾坤。当然,直接用代数方法求解常微分方程是一件相对困难的事情,所以才有了拉普拉斯变换,才有了特征方程,这一切的一切,都是在帮我们分析“解”啊。
更新,原来写的是“偏微分方程”,概念不对,经知友提醒做了修改,应该是“常微分方程”。具体概念区别可看下面一篇:



评论(0)
您还未登录,请登录后发表或查看评论