

1 跟踪问题的引出
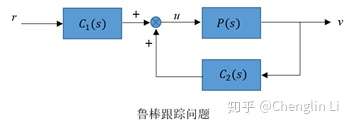
取目标函数如下

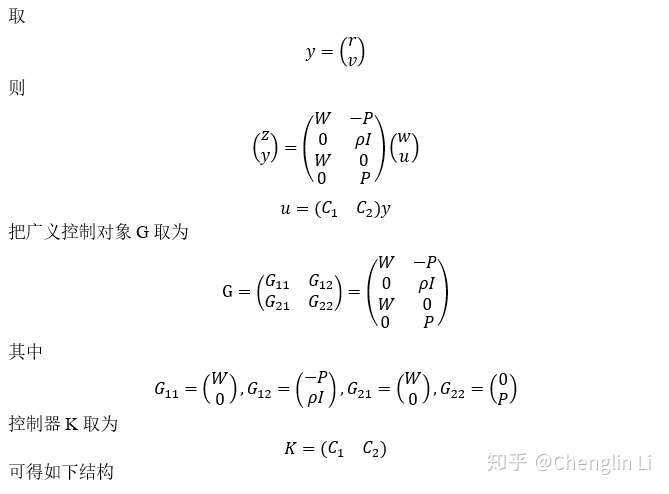
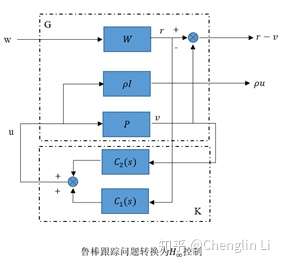

2 转换为标准鲁棒控制问题
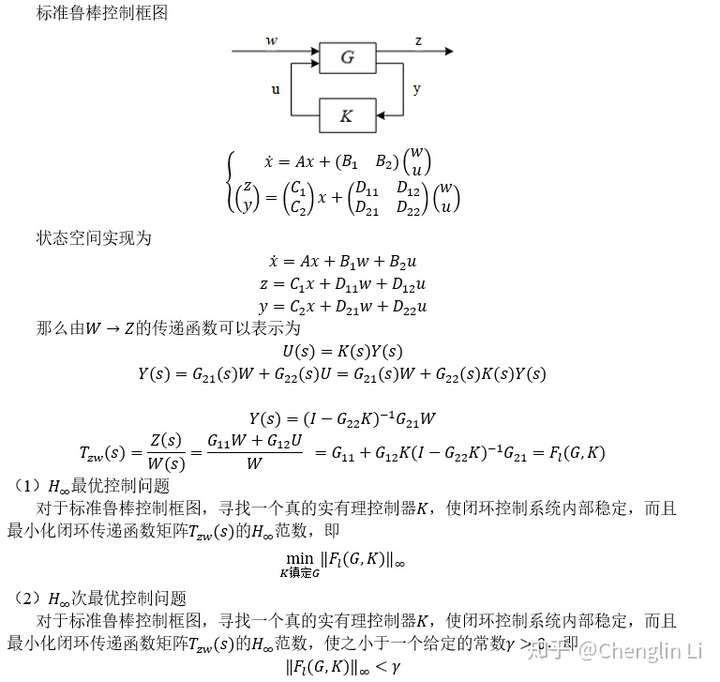
3 根据传递函数推导LMI形式
(1)假设(A,B,C)系统为可控可测的
则可以设计一个静态反馈控制器
使得相应地闭环系统渐进稳定
并且当其相应的闭环传递函数满足
从而H∞状态反馈控制器存在,其解为
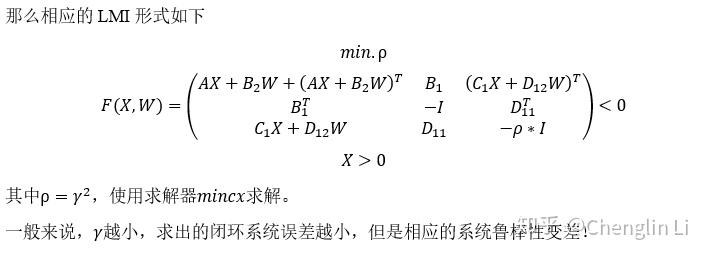
或者最优控制

取目标函数如下
(1)假设(A,B,C)系统为可控可测的
则可以设计一个静态反馈控制器
使得相应地闭环系统渐进稳定
并且当其相应的闭环传递函数满足
从而H∞状态反馈控制器存在,其解为
或者最优控制



您当前积分:0

评论(0)
您还未登录,请登录后发表或查看评论