

1. 状态估计概述
为啥需要状态估计?因为机器人学中存在很多方面的不确定性
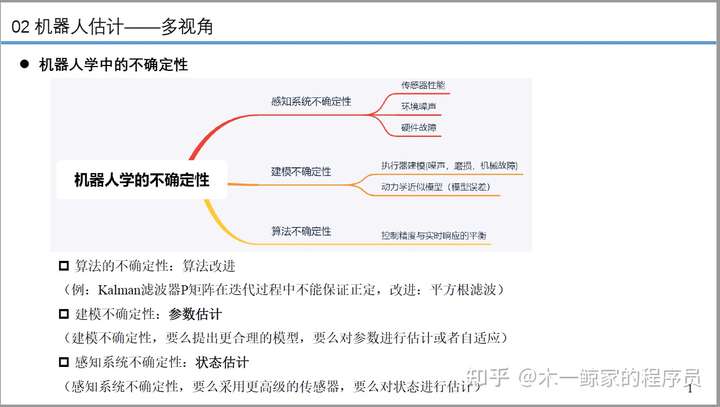
从更大方面来说,机器人由于不确定性从而引申出来最优估计(参数估计与状态估计)这个话题
在这个专栏中仅考虑状态估计,我们将从两个方面来讨论机器人状态估计
2. 控制基础
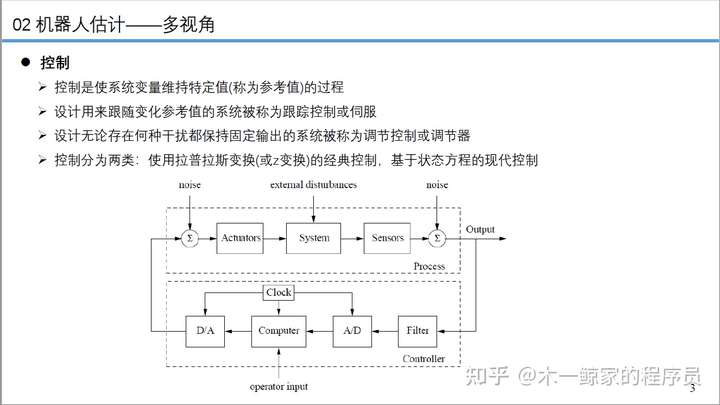
从上图中我们可以知道机器人控制整个架构图,而研究机器人控制也有两个方面的话题(《自动控制原理》中基于Laplace变换的经典控制,《现代控制理论》中基于状态方程的现代控制)
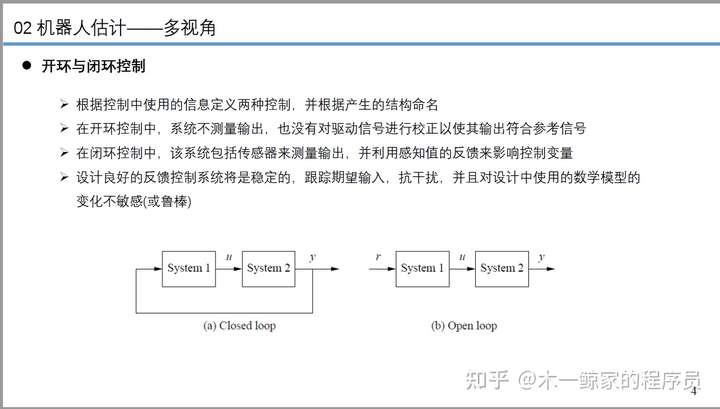
而控制中最重要的话题即——反馈
遇事不决,反馈控制
反馈控制的引入,构建了现代控制理论的核心:控制器 + 估计器
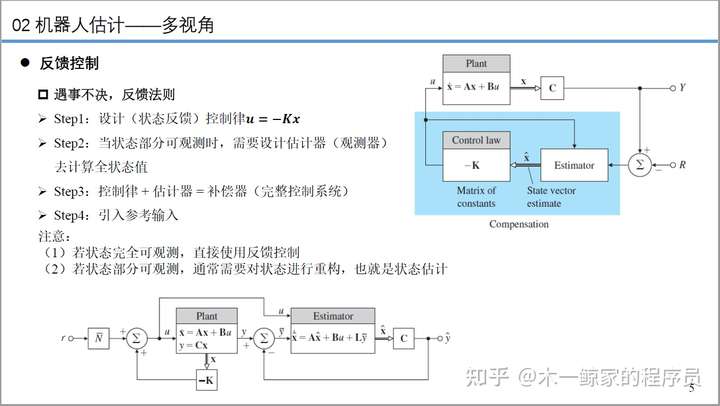
如果状态不可完全观测,通常需要对状态进行重构,设计估计器
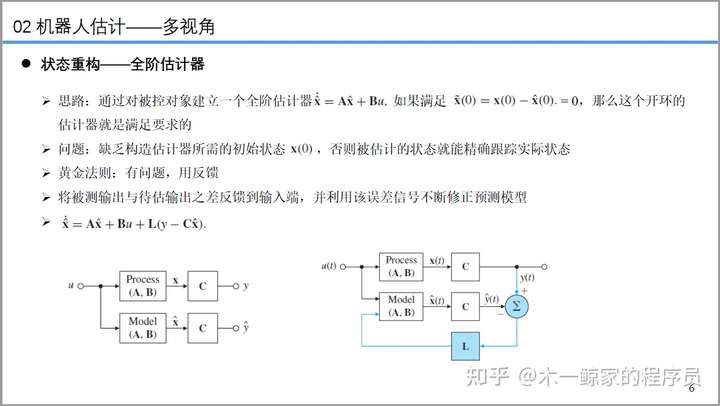
3. 状态重构
状态重构分为 全阶估计器 和 降价估计器

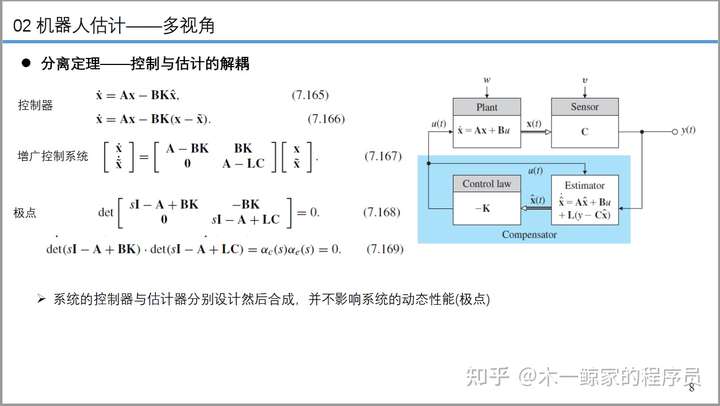
4. 分离定理
分离定理确定了控制器与估计器的设计能够解耦
总结:

状态估计最基础的内容应该就是Luenberger观测器了,Luenberger观测器明确了一个话题:就是估计器的组成部分为:基于模型的预测 + 基于感知的校正
而这个思路,包括下一部分的概率视角中(预测与更新)从本质上来看是一致的,构成了在线状态估计实现方法
Reference
- Feedback Control of Dynamic Systems
- Probabilistic Robotics




评论(0)
您还未登录,请登录后发表或查看评论