

文章目录
软件环境
安装Movelt
MoveIT控制机械臂
1.建立机械臂仿真模型
(1)运行仿真建模命令
(2)Create New MoveIt! Configuration Package
(3)配置self-collision
(4)定义关节
(5)定义Planning Groups
(6)测试机械臂模型
(7)定义End Effectors
(8)定义ROS Control
(8)设置Author information
(9)Generate Configuration files
软件环境
Ubuntu18.04
ROS版本:melodic
安装Movelt
sudo apt-get install ros-melodic-moveit
sudo apt-get install ros-melodic-franka-description
MoveIT控制机械臂
1.建立机械臂仿真模型
(1)运行仿真建模命令
roslaunch moveit_setup_assistant setup_assistant.launch
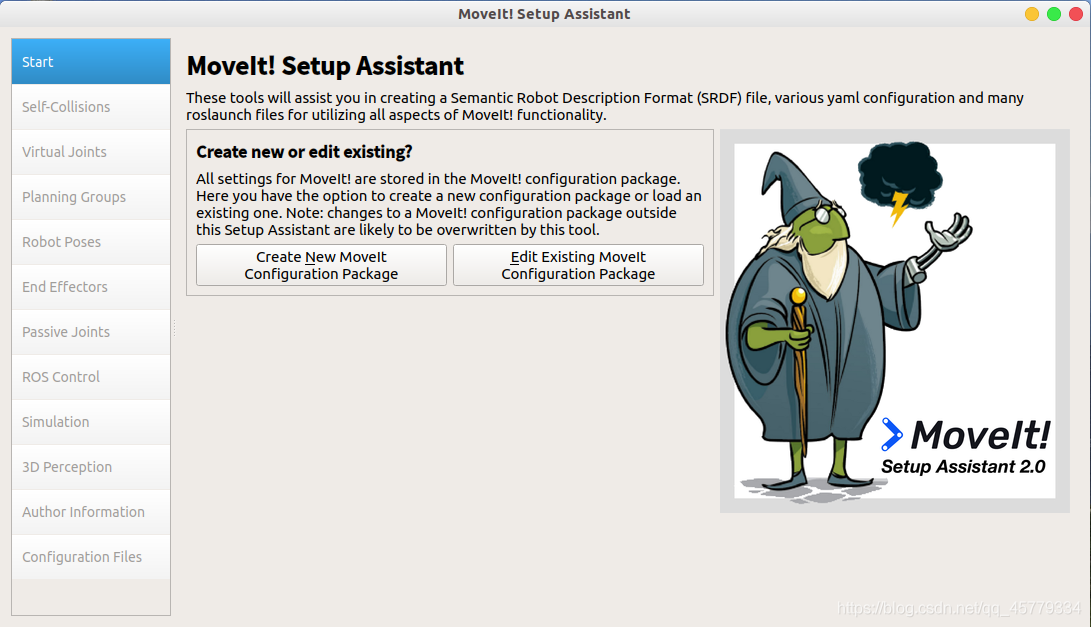
(2)Create New MoveIt! Configuration Package
我们选择Create New MoveIt! Configuration Package,在弹出的页面中点browse,选择路径/opt/ros/melodic/share/franka_description/robots/panda_arm_hand.urdf.xacro ,确认后点load会出现下面这样的窗口: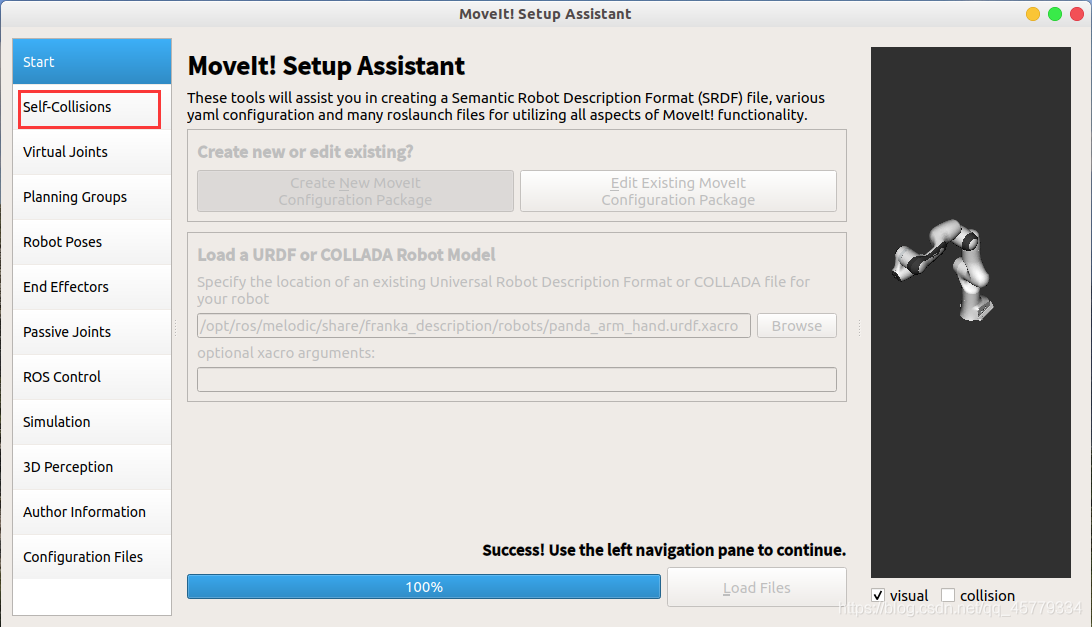
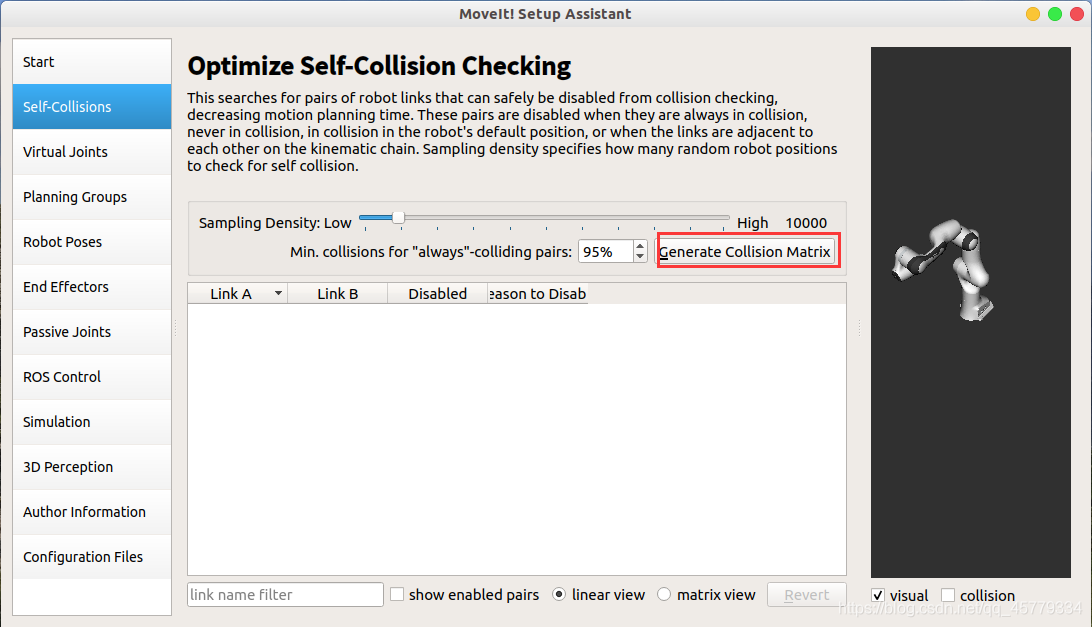
(3)配置self-collision
下一步,配置self-collision,直接选择默认的95%,点击Generate Collision Matrix:
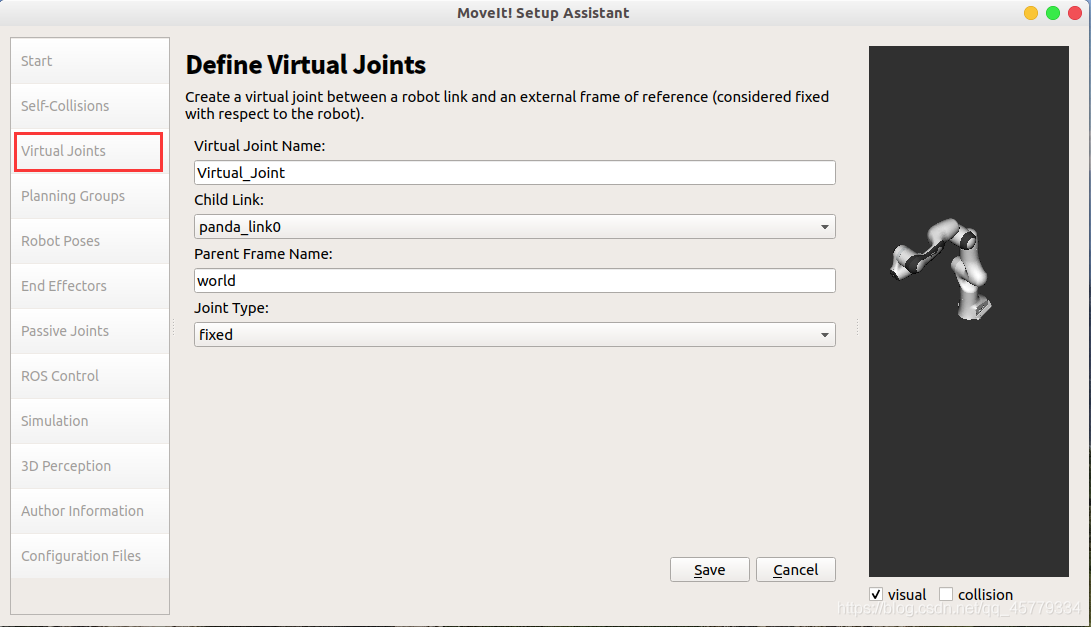
(4)定义关节
下一步,定义Virtual Joints:
(5)定义Planning Groups
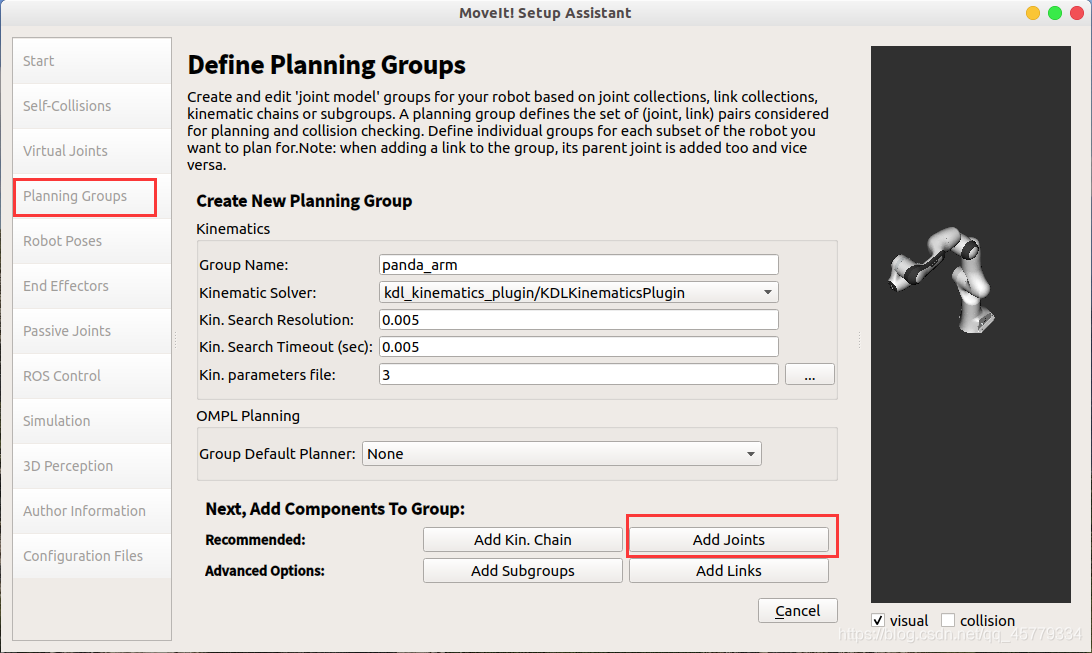
填完上边的信息后,点击Add Joints,如下图选择这些joint:
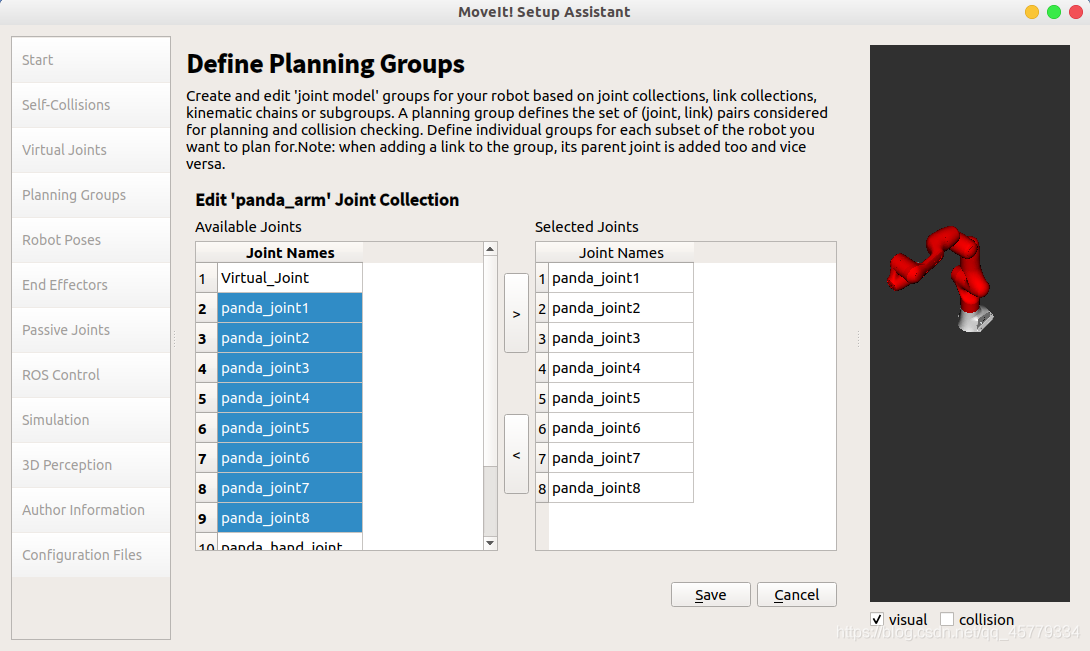
然后点击save,再点击add group,然后如下进行配置:
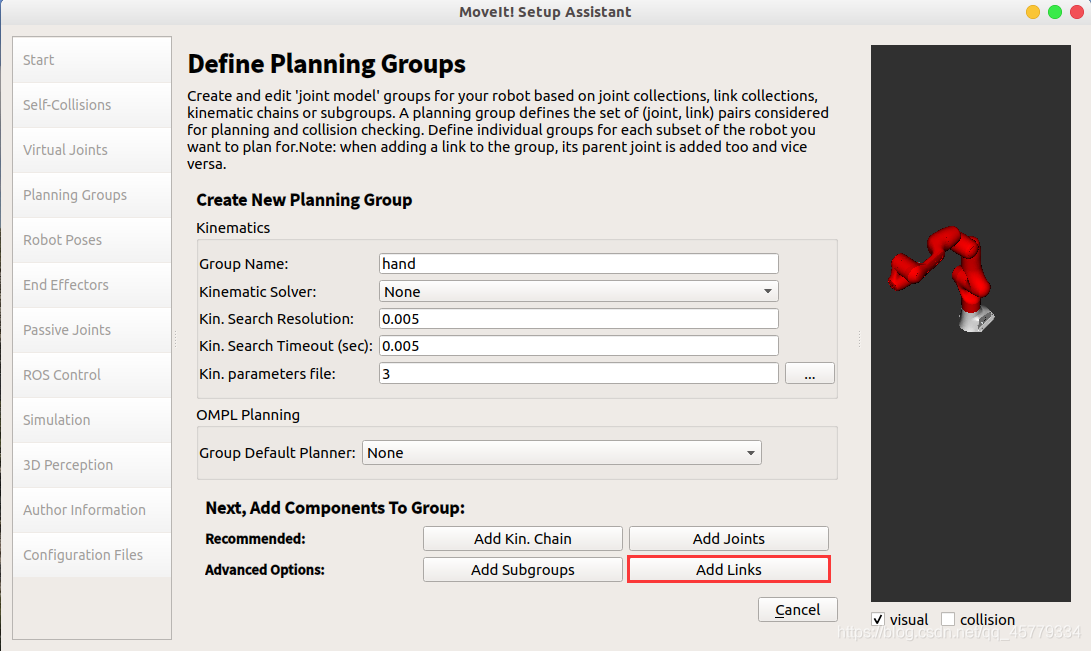
然后点击Add Links,在弹出的窗口里选择如下links:
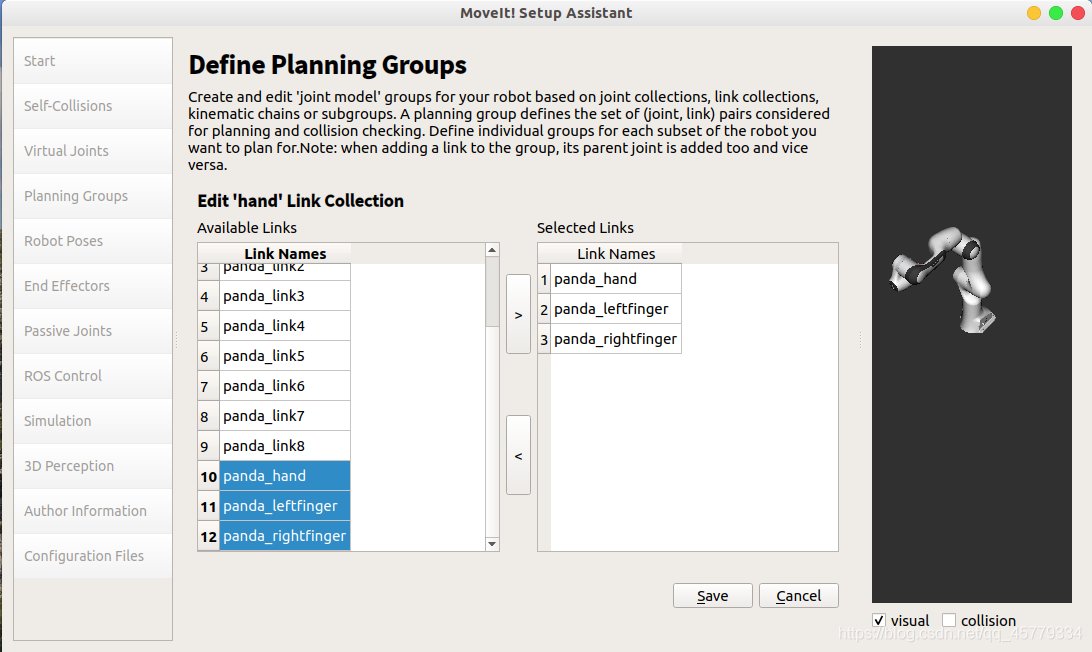
save即可。
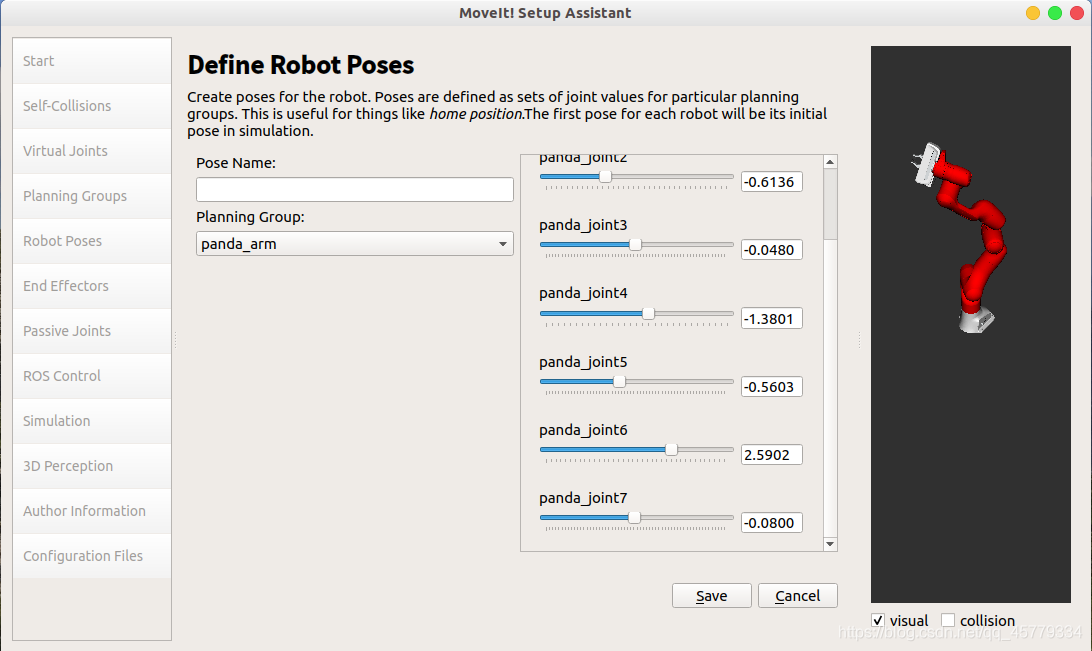
(6)测试机械臂模型
接下来我们选Robot poses, 点击add pose,调节8个joints,可以随意调节数值,机械臂的对应关节就会对应运动起来,这一步主要是为了检查前几步是否正确。
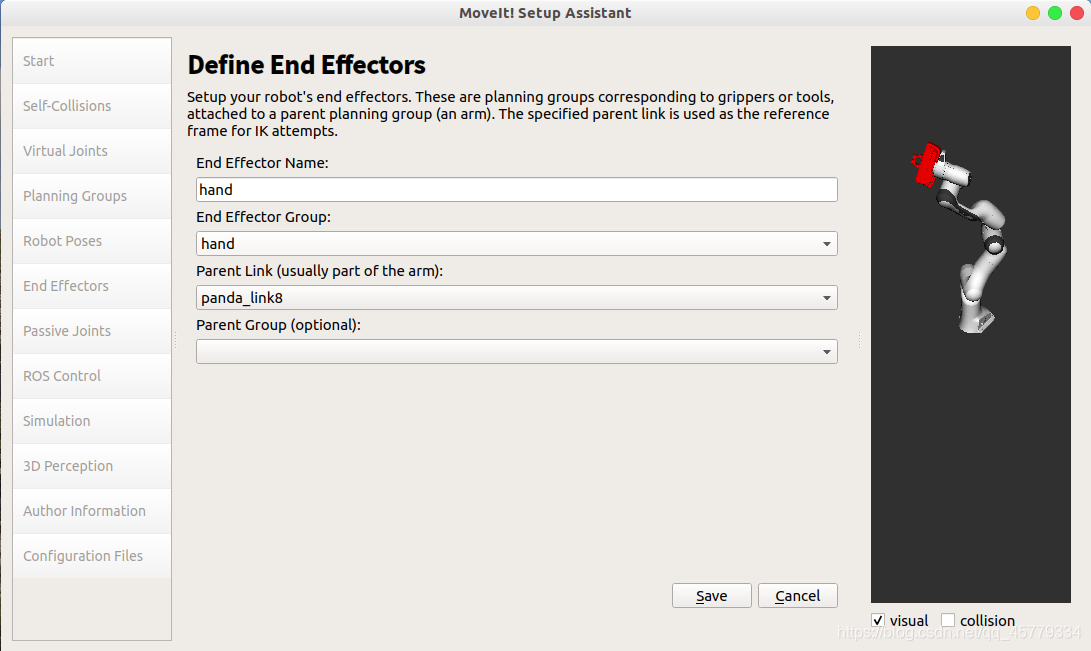
(7)定义End Effectors
(8)定义ROS Control
点击add controller:
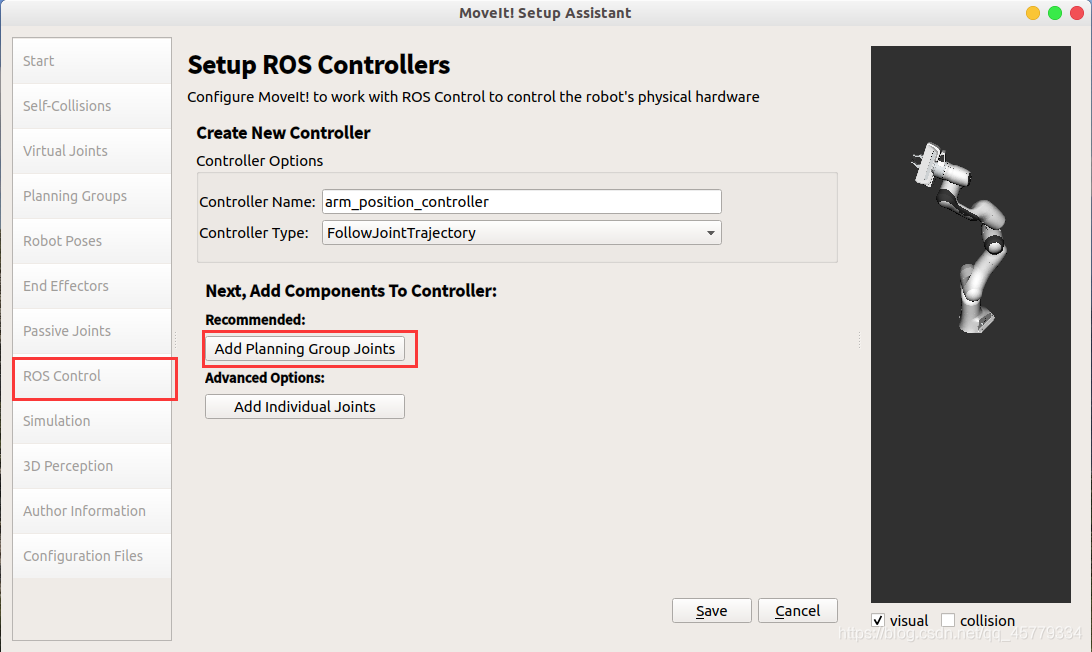
点击Add planning group joints,选择panda_arm:
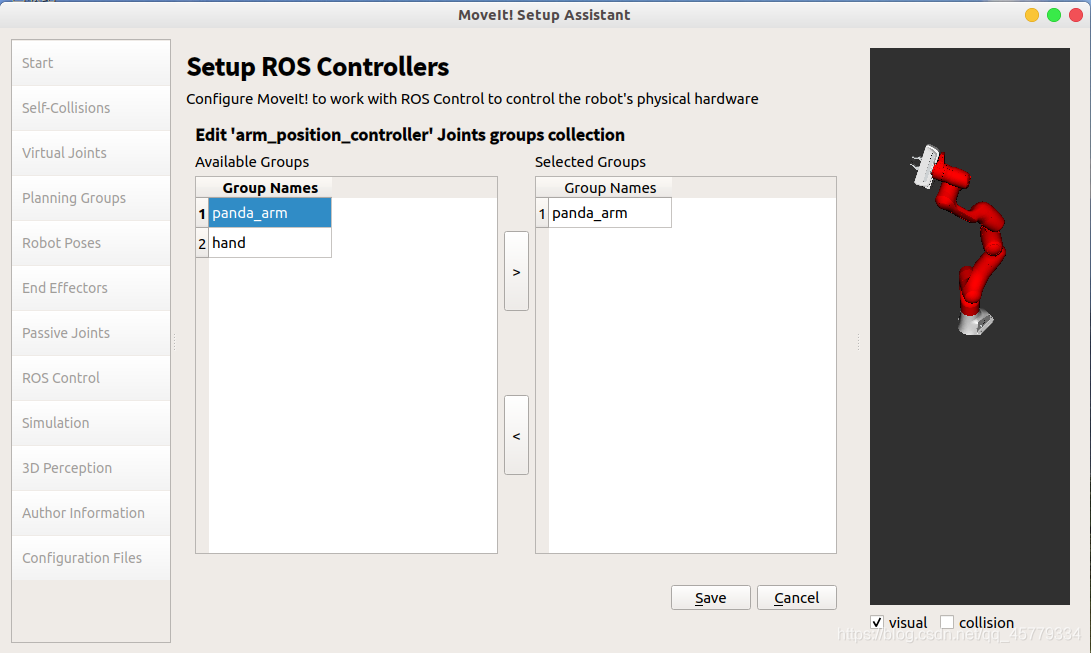
save即可。
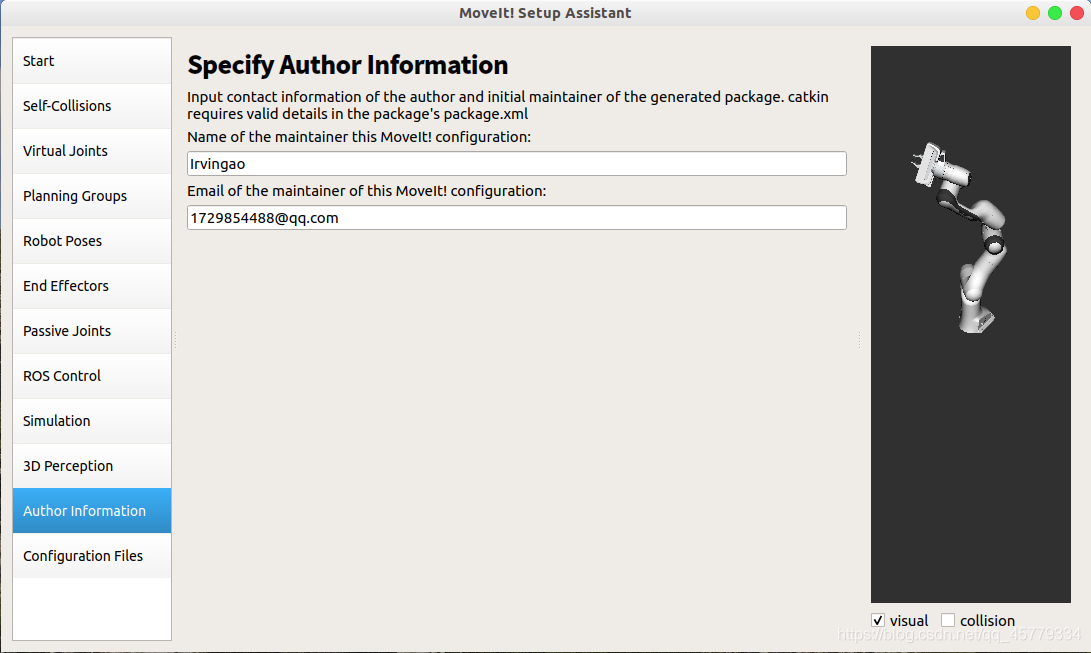
(8)设置Author information
填入作者姓名和邮箱,注意这里必须填写,否则无法生成仿真模型。
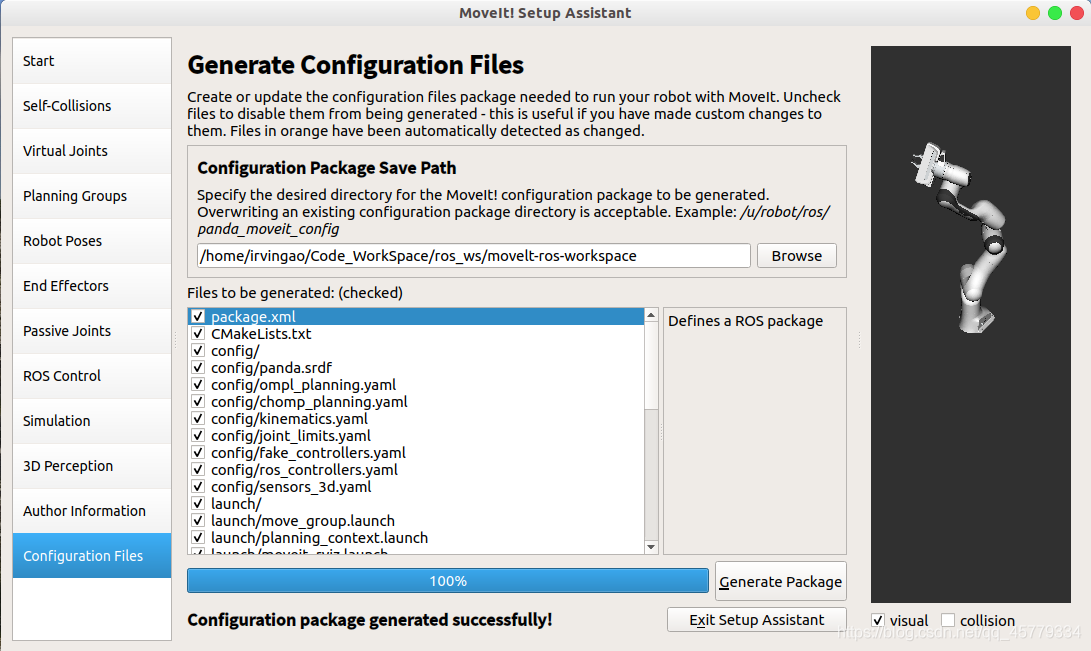
(9)Generate Configuration files
新建一个文件夹,然后点击Generate Package:
参考文章:
ROS 从安装到机械臂的仿真与实验
MoveIt教程[15]:MoveIt! Setup Assistant



评论(0)
您还未登录,请登录后发表或查看评论