

一、需求: 使用Tianbot_mini_gazebo环境,更换为自己搭建的跑道地图,使用move_base框架,Action通信,导航小车跑圈
二、实现效果: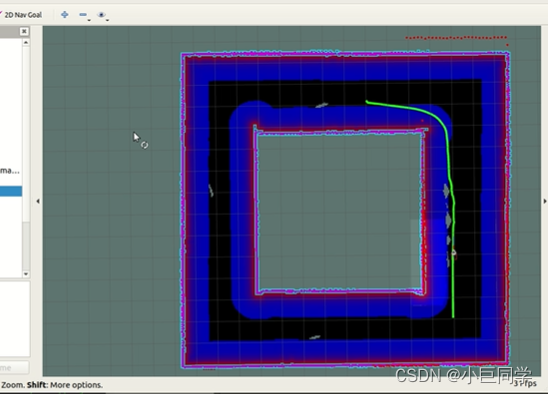
三、实现过程:
1、先参考:Action通信简介及案例1:发送单导航目标点
2、替换仿真地图
地图代码:room_square.world
添加到worlds文件目录下
修改launch文件:

3、加载仿真环境
roslaunch tianbot_mini_gazebo simulation.launch
4、启动SLAM
roslaunch tianbot_mini slam.launch
5、运行run_square.py节点(代码在下面)
roscd ros_code/action
python3 run_square.py
四、代码部分:
https://github.com/Grizi-ju/ros_program/tree/main/action
配套讲解视频会发在B站,欢迎大家关注!
https://space.bilibili.com/700656154?spm_id_from=333.1007.0.0
#!/usr/bin/env python
# -*- coding: utf-8 -*
# 动作通信:该例程在room_square仿真环境下,执行/action_client通信,消息类型move_base_msgs/MoveBaseAction MoveBaseGoal
import roslib
import rospy
import actionlib
from actionlib_msgs.msg import *
from geometry_msgs.msg import Pose, Point, Quaternion, Twist
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
from tf.transformations import quaternion_from_euler
from math import pi
class RunSquare():
def __init__(self):
rospy.init_node('run_square', anonymous=False)
rospy.on_shutdown(self.shutdown)
# 1、订阅move_base服务器消息 + 发布速度话题
self.cmd_vel_pub = rospy.Publisher('cmd_vel', Twist, queue_size=10)
self.move_base = actionlib.SimpleActionClient("move_base",MoveBaseAction)
rospy.loginfo("Waiting for move_base action server...")
self.move_base.wait_for_server(rospy.Duration(5.0))
rospy.loginfo("Connected to move base server")
rospy.loginfo("Starting navigation test")
# 2、目标点内容
# 创建四元数列表,保存目标的角度数据
quaternions = list()
# 定义四个顶角处机器人的方向角度(Euler angles:http://zh.wikipedia.org/wiki/%E6%AC%A7%E6%8B%89%E8%A7%92)
euler_angles = (pi/2, pi, 3*pi/2, 0)
# 将上面的Euler angles转换成Quaternion的格式
for angle in euler_angles:
q_angle = quaternion_from_euler(0, 0, angle, axes='sxyz')
q = Quaternion(*q_angle)
quaternions.append(q)
# 创建四个导航点的位置(角度和坐标位置)
waypoints = list()
waypoints.append(Pose(Point(5.1, 2.0, 0.0), quaternions[0]))
waypoints.append(Pose(Point(1.8,5.5, 0.0), quaternions[1]))
waypoints.append(Pose(Point(0.0, 2, 0.0), quaternions[2]))
waypoints.append(Pose(Point(0.0, 0, 0.0), quaternions[3]))
for poses in range(0,3):
i=0
while i<4 and not rospy.is_shutdown():
goal = MoveBaseGoal()
goal.target_pose.header.frame_id='map'
goal.target_pose.header.stamp=rospy.Time.now()
goal.target_pose.pose=waypoints[i]
self.send_goal(goal)
i+=1
def send_goal(self, goal):
# 3、将目标点发送出去
rospy.loginfo("Sending goal")
self.move_base.send_goal(goal)
# 4、五分钟时间限制 查看是否成功到达
finished_within_time = self.move_base.wait_for_result(rospy.Duration(300))
if not finished_within_time:
self.move_base.cancel_goal()
rospy.loginfo("Timed out achieving goal")
else:
state = self.move_base.get_state()
if state == GoalStatus.SUCCEEDED:
rospy.loginfo("Goal succeeded!")
else:
rospy.loginfo("Goal failed! ")
def shutdown(self):
rospy.loginfo("Stopping the robot...")
self.move_base.cancel_goal()
rospy.sleep(2)
self.cmd_vel_pub.publish(Twist())
rospy.sleep(1)
if __name__ == '__main__':
try:
RunSquare()
except rospy.ROSInterruptException:
rospy.loginfo("Navigation finished.")

评论(0)
您还未登录,请登录后发表或查看评论