

今天为了能让小车导航用上更好更精确的地图,想到在gazebo里建一个仿真的环境来建图,开开心心的用Building Editor画完,保存模型,选中模型,果断点击放置,美滋滋。。。。。个pi。。。。
报错:gzclient: /build/ogre-1.9-B6QkmW/ogre-1.9-1.9.0+dfsg1/OgreMain/src/OgreNode.cpp:630:virtual void Ogre::Node::setScale(const Ogre::Vector3&): 假设 ‘!inScale.isNaN() && “Invalid vector supplied as parameter”’ 失败。
escalating to SIGKILL on server

画了大半天和我说不能放置?一点击放置gazebo马上闪退,真是搞人心态。网上艘了一圈发现可能是gazebo的版本过低了。。。。都gazebo9了还低的吗。。。。无奈之下还是选择升级一下好了,万一就可以了呢。
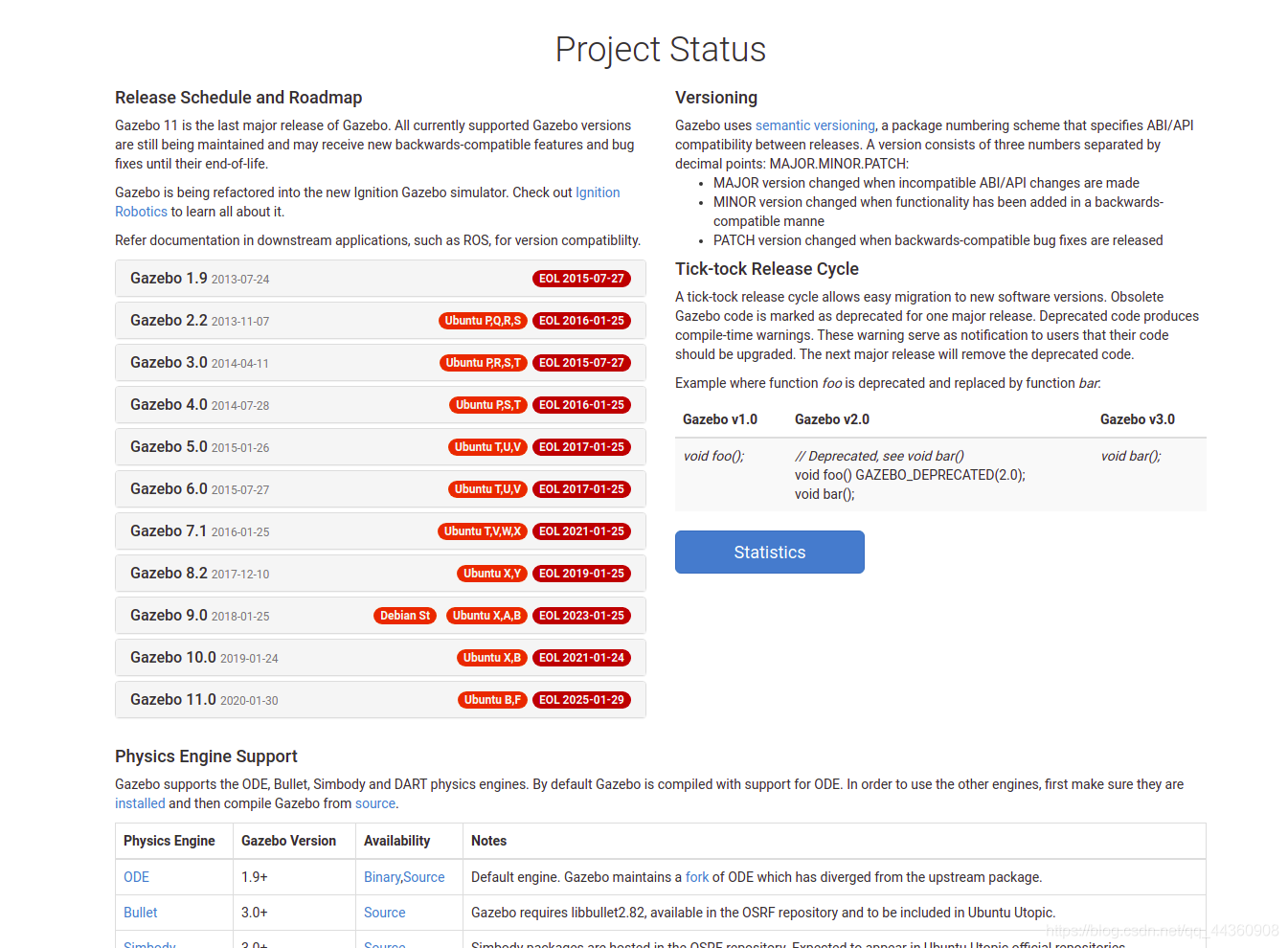
看了一下版本,直接上11好了。冒着环境崩掉的危险开始重装gazebo。
卸载之前确定一下版本
$ gazebo —version
查看一下gazebo相关插件
$ dpkg -l | grep gazebo
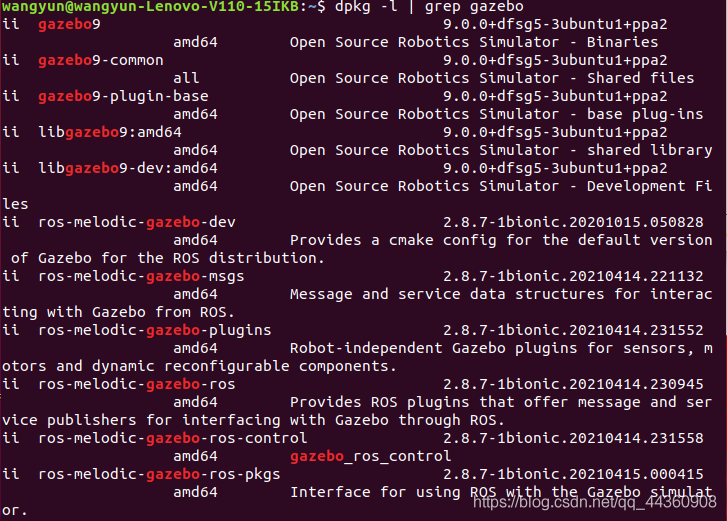
好家伙还挺多,心里建设了一下,敲下了下面这句
$ sudo apt-get remove gazebo9 gazebo9-common gazebo9-plugin-base libgazebo9:amd64 libgazebo9-dev:amd64 ros-melodic-gazebo-_
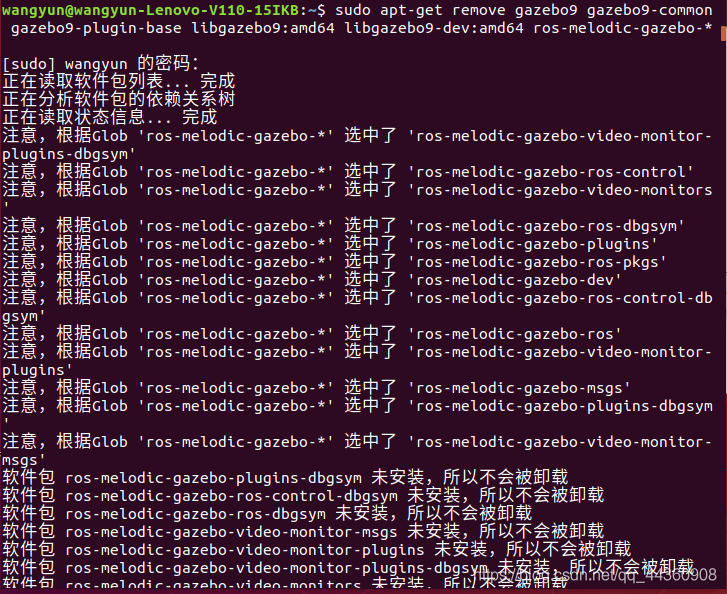
等待卸载完毕,下面开始装gazebo11,一个新的开始。首先设置您的计算机以接受来自 packages.osrfoundation.org 的软件。
$ sudo sh -c ‘echo “deb http://packages.osrfoundation.org/gazebo/ubuntu-stable
lsb_release -csmain” > /etc/apt/sources.list.d/gazebo-stable.list’
可以检查文件是否正确写入
$ cat /etc/apt/sources.list.d/gazebo-stable.list
一切正常的话应该是这样的

然后设置密钥
$ wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
然后输入更新一下
$ sudo apt-get update

接下来安装gazebo11
$ sudo apt-get install gazebo11
一波等待之后,继续安装依赖
$ sudo apt-get install libgazebo11-dev
装完了?不存在的,在装一下ros相关插件
$ sudo apt install ros-melodic-gazebo11-_

好了装完了,运行一下gazebo验证一下行不行。
$ gazebo
我在gazebo里放置了一下,神奇的事情发生了,他好了,我又可以了,之前下载的模型库也都还在,自己画的也还在,nice!果然还是得经常更新一下软件,希望我的垃圾电脑能够带的动。
参考教程:http://gazebosim.org/tutorials?tut=install_ubuntu&cat=install
https://blog.csdn.net/weixin_44623637/article/details/109249607




评论(0)
您还未登录,请登录后发表或查看评论