

【 课程目的 】
本课程是基于《四足机器人控制与仿真入门》的基础上的拓展课程。
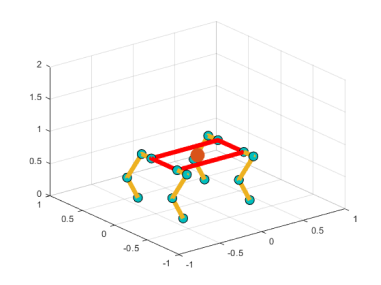
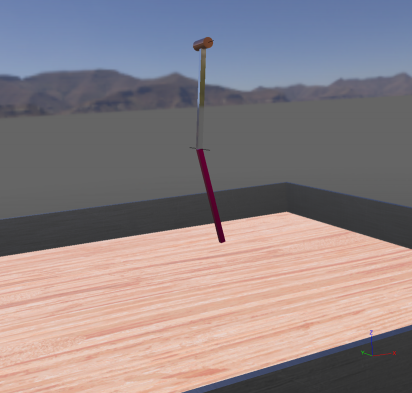
课程采用Coppeliasim作为四足机器人仿真平台,Matlab作为编程语言,实现二维空间中VMC算法的仿真应用。
通过此课程,大家可以更加深入的掌握Coppeliasim这款仿真软件,同时实现基于施加关节力矩的四足机器人控制方式。

【 课程内容 】
本课程共七节内容,课程总时长为2小时,让大家在课程的引导下实现四足机器人的VMC算法仿真,培养独立思考和解决问题的能力,因此此次课程不会每个细节都讲解到。
- 第一节内容是对此次课程的一个总览。
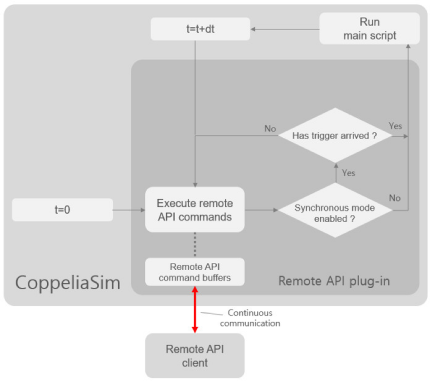
- 第二节内容是对Coppeliasim功能的进一步拓展,深入介绍其通信模式,解析远程API控制物理引擎的执行模式。同时也对软件中力矩控制的实现做一个讲解。
- 第三节内容是推导四足机器人单腿的正运动学与雅可比矩阵的计算,包括二自由度和三自由度的代码推导验证。
- 第四节内容是分析VMC算法的原理,分别对单腿摆动相和支撑相的VMC控制策略进行推导。
- 第五节内容介绍了Crawl步态和Trot步态的时序控制流程,即机器人的状态机运行机制。
- 第六节内容对仿真代码进行分析,首先介绍了代码的总体框架,然后对代码细节进行讲解,包括状态机实现、摆动相轨迹规划、触地检测、力矩计算等功能。
- 第七节内容首先是对Coppeliasim通信模式拓展部分的讲解,然后提供了一个webots中的VMC算法单腿摆动相测试仿真demo,最后简要介绍了三维空间中的VMC算法实现方式。
【 其他课程 】
【 课程目录 】
-
1、 四足机器人VMC算法仿真实现课程总览
-
2、Coppeliasim重要功能讲解
- 2.1 、Coppeliasim的阻塞通信、同步通信
- 2.2、 Coppeliasim的力矩控制实现
- 2.3、 其他可能遇到的小技巧与注意事项
-
3、四足机器人单腿正运动学与雅克比矩阵推导
- 3.1、 单腿正运动学
- 3.2、 雅克比矩阵求解
-
4、VMC算法原理解析
- 4.1 、摆动相VMC原理
- 4.2 、支撑相VMC原理
-
5、Coppeliasim重要功能讲解
- 5.1、 Crawl步态时序
- 5.2 、Trot步态时序
-
6、仿真代码分析
- 6.1 、代码总体架构
- 6.2 、时序控制
- 6.3、摆动相轨迹规划
- 6.4触地检测、力矩计算
-
7、总结与展望
- 7.1 、Coppeliasim通信模式拓展
- 7.2 、webots中的VMC算法单腿摆动相测试仿真
- 7.3 、三维空间中的VMC算法实现方式展望
*课程资料在微信公众号“古月居”后台回复“仿真控制资料”获取
【 温馨提示 】
1 、学习本课程前建议先学习四足机器人控制与仿真入门,了解Coppeliasim的基本操作。
2、具有MATLAB编程基础,具有一定的机器人学知识,对足式机器人控制感兴趣的人群。
3、由于本产品的视频课程属性,观看后不予退款。
4、本课程购买后2年内可以免费观看。由于本产品的视频课程属性,观看后不予退款。
【 购课优惠 】
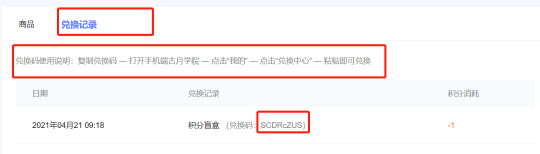
古月居官网所获积分可以兑换优惠券哦!打开古月居官网-【我的主页】-【积分兑换】,点击兑换。

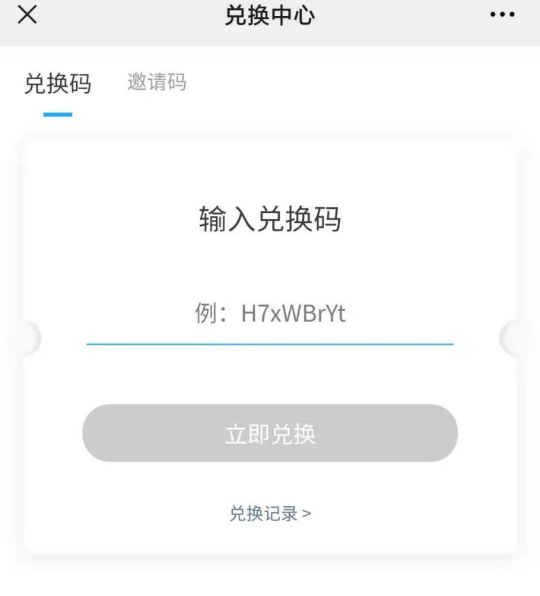
兑换成功后在【兑换记录】查看兑换码,就可以在手机端使用了,不要错过省钱机会哟~

两人拼团即可享受优惠价~
三人拼团更实惠哦!
购买本课程和《四足机器人控制与仿真入门》
前50名购买可领取5元优惠券
每人限领1张
领取后15天内有效
---------------------------------------------------------------------------------------------------------------------------------------------
优惠券领取方式如下:


(扫码可领取课程优惠券)



评论(0)
您还未登录,请登录后发表或查看评论