

前言
大象机器人最新推出的桌面型机械臂,是一款高精度的三轴机械臂。
什么是步进电机
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。
步进电机运行跟踪实施特性优于伺服电机,由于步进电机每发一个脉冲走一个角度,发脉信号电机就会走不会有延时,而伺服电机为闭环控制,发完脉冲和编码返回对比处理,如有过冲在转回去,有一定延时,踪踪特性差于步进电机。
性能的介绍
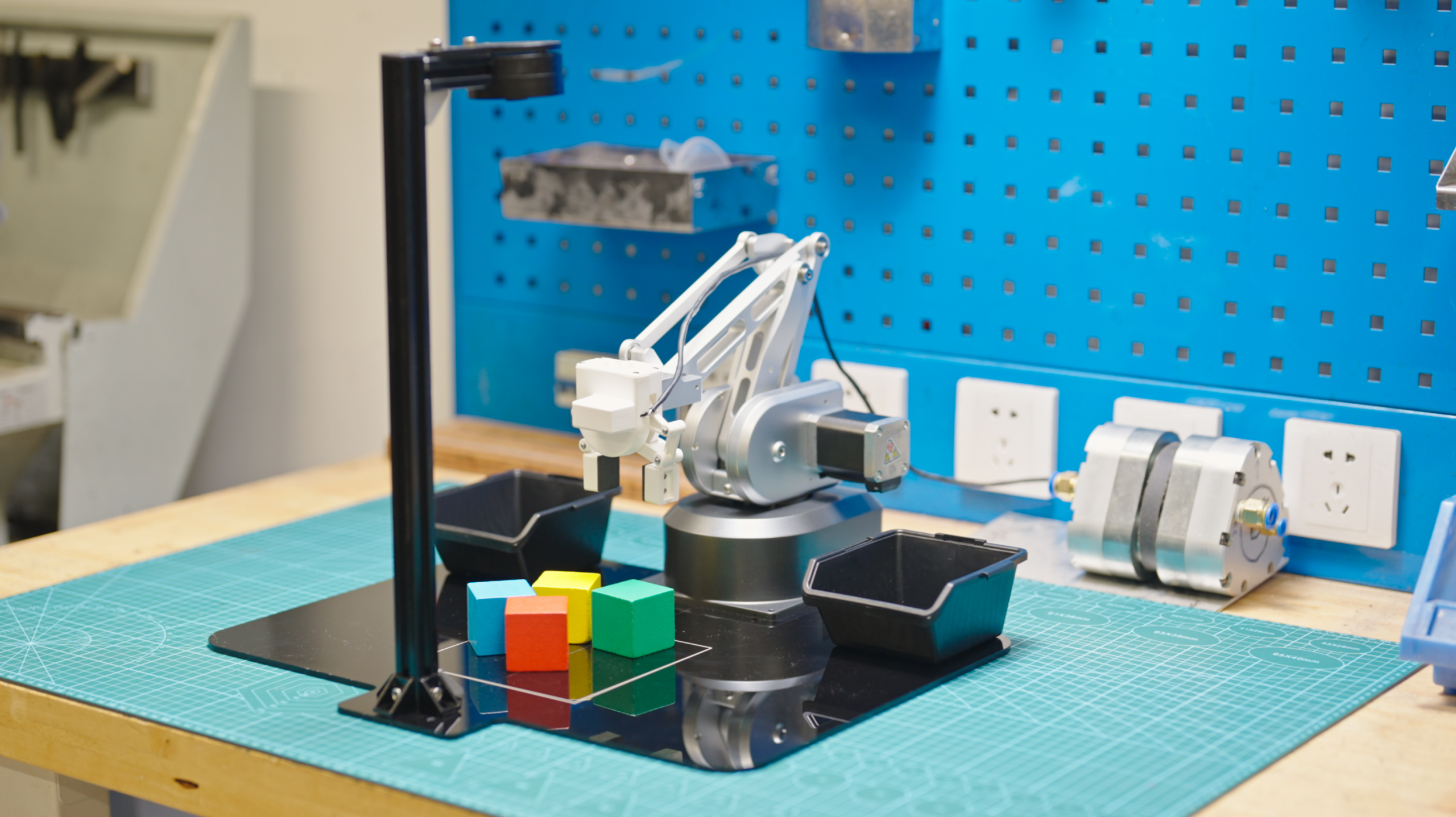
它的外观可以看出是一款工业外观的机械臂,搭配着高精度的步进电机,让我们来看看下面的表格它的具体规格是怎样的。
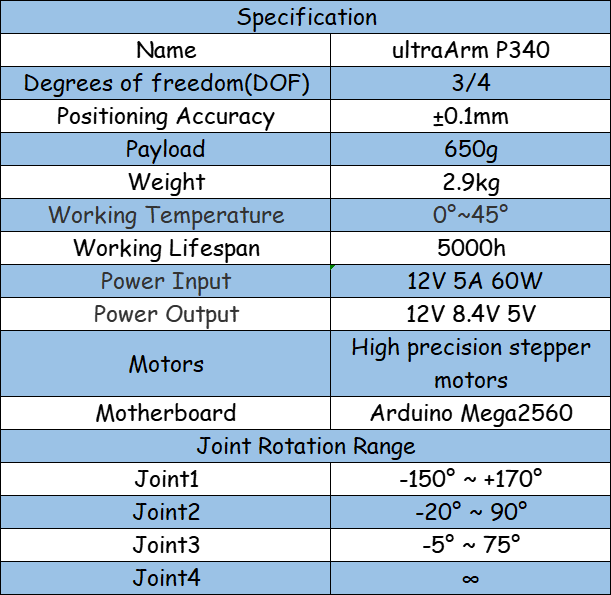
你可能会有疑惑为什么一个三轴的机械臂有会四轴?
那是因为这里大象机器人设计了一个快速更换的舵机,能够很轻易的装上ultraArm让,它变成四轴机械臂。
这第四轴可不一般,它是能够快速更换的一个电机。它的关节没有限制,可以一直持续的向同一个方向转动。

这是快换的舵机
这是安装之后的样子
在使用了高精度的步进电机后,ultraArm的重复定位精度可以控制在0.1mm范围内,可以实现许多对精度要求高的场景当中。
使用
对于这款机械臂最大的亮点就是它的几个套装:
● 视觉识别和抓取功能
● 写字和画画功能
● 激光雕刻功能
下面介绍如何使用ultraArm。
首先,使用ultraArm是需要搭配一台PC,可以是笔记本电脑又或者可以是树莓派这类微型计算器。ultraArm需要接收命令才能去执行工作。
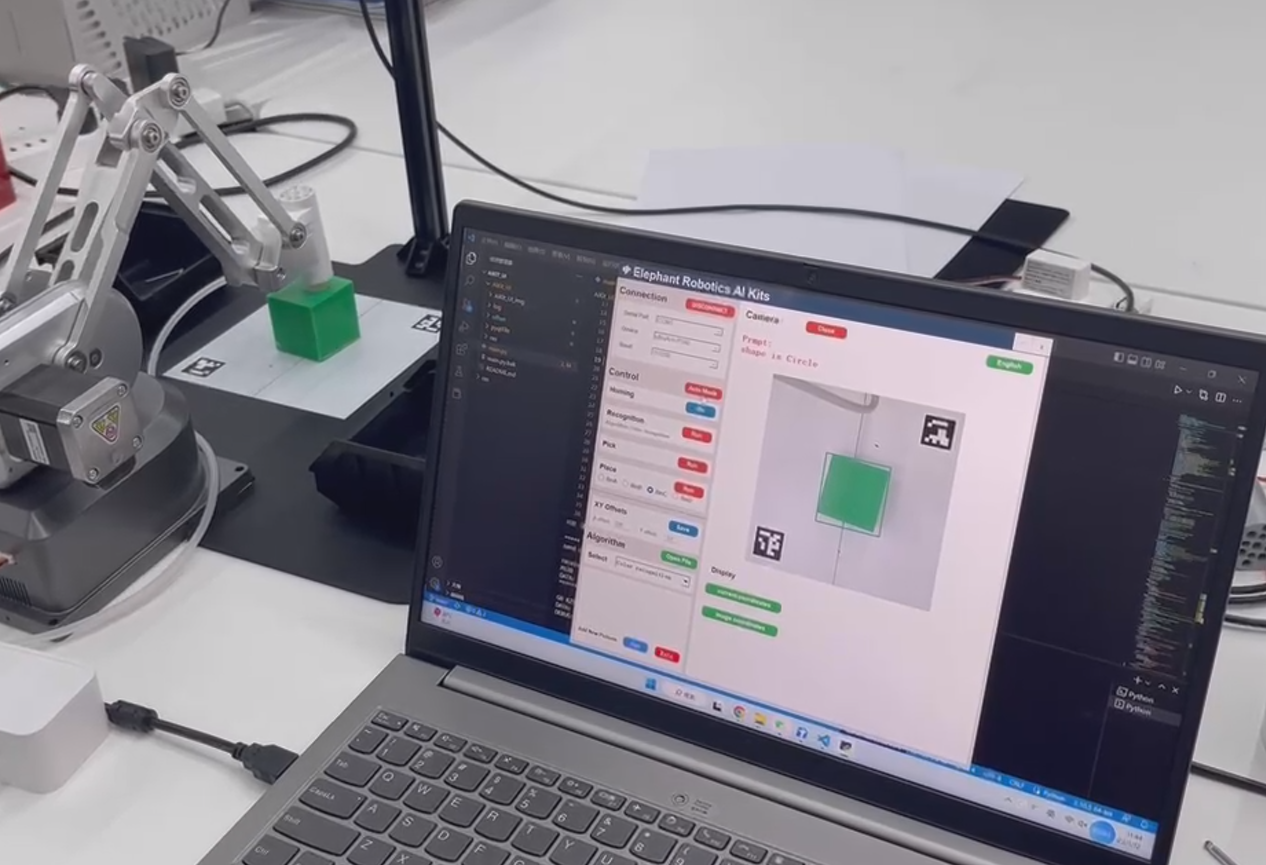
图:运行中的ultraArm
目前ultraArm支持python,C++,Arduino,ROS2等编程语言。使用起来也是相当的方便和简单。让人值得一提的是,即使没有任何编程基础的用户也可以很快速的使用起来。因为它有一个图形编程的软件叫myblockly,简单直观的操作界面让用户能够快速上手。
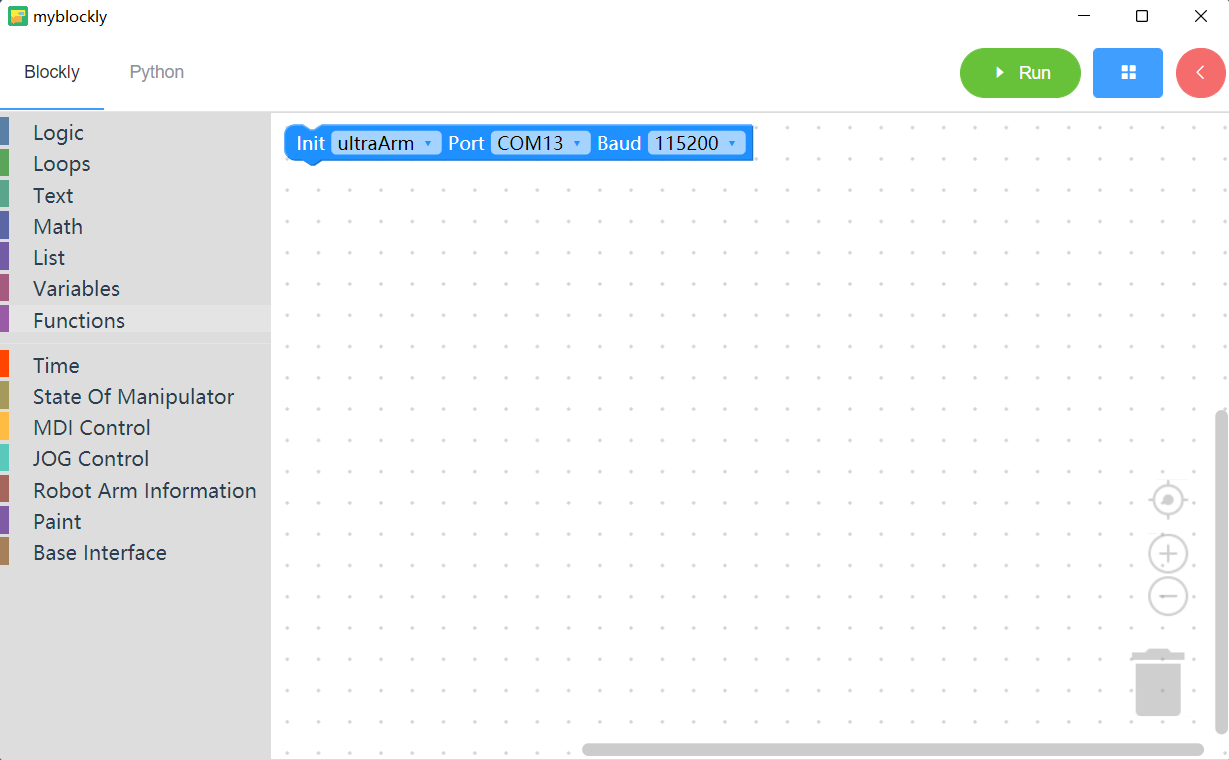
图:myblockly界面
**核心亮点
视觉识别和抓取套装**
这是一套基于python编写的程序,根据机器视觉+算法+图形界面制作,实现对颜色,图形,二维码,图像的识别和机械臂的抓取功能。
这个程序通过人性化设计,有图形界面提供操作,使用起来非常友好。它可以在算法那选择不同的算法进行使用,例如颜色识别,形状之别,二维码识别等。这个程序使用的流程:先选择好机械臂的串口跟波特率,然后打开摄像头,最后选择要使用的算法功能在点击auto mode。
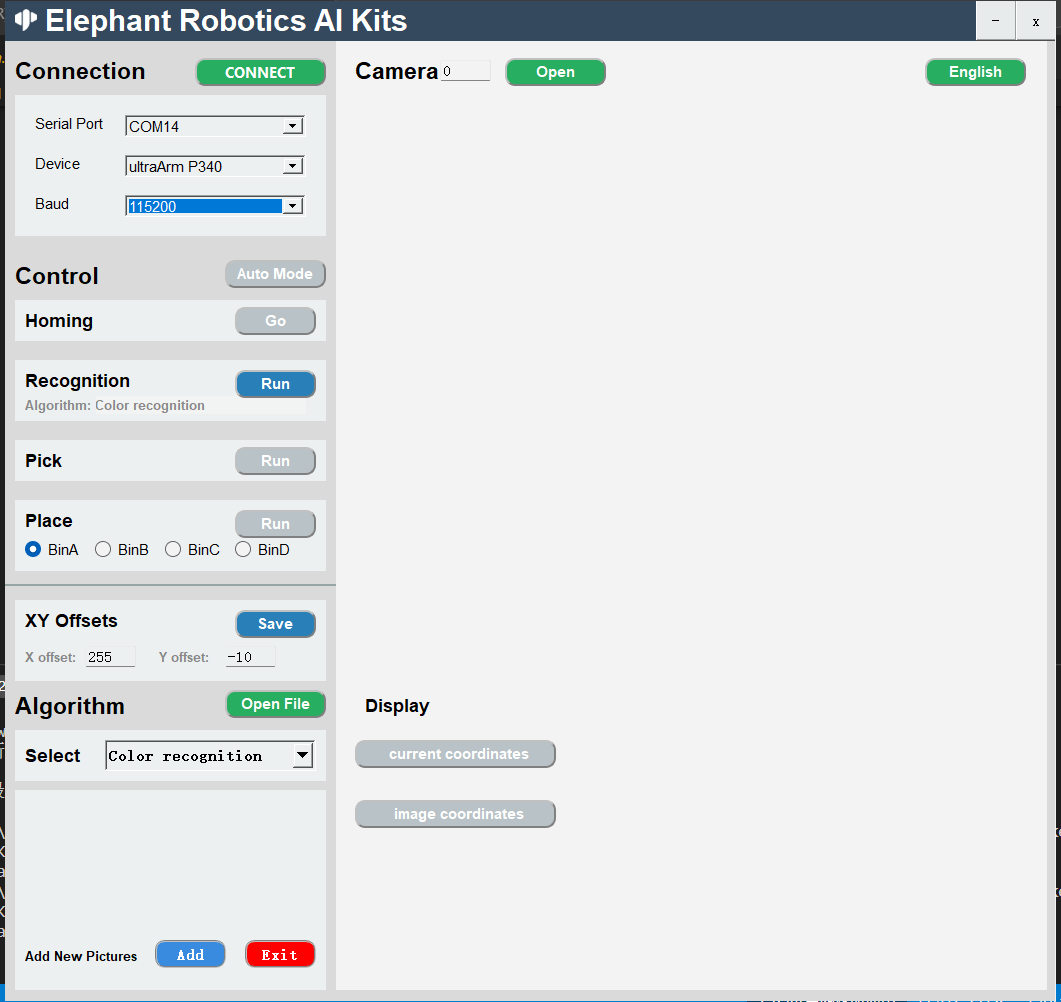
图:GUI图形界面
通过这个套装以及开源的代码,可以了解到Opencv对图像的处理和机械臂是如何巧妙的结合在一起,一款十分适合刚接触机器视觉的用户来学习。
写字和画画套装

在这里我要先介绍一个软件Elephant Luban,在后面起到至关重要的作用。
Elephant Luban用于生成图像轨迹和控制ultraArm工作。它的界面简洁,操作简单,能够快速的生成一个图像的轨迹提供给机械臂去复现。
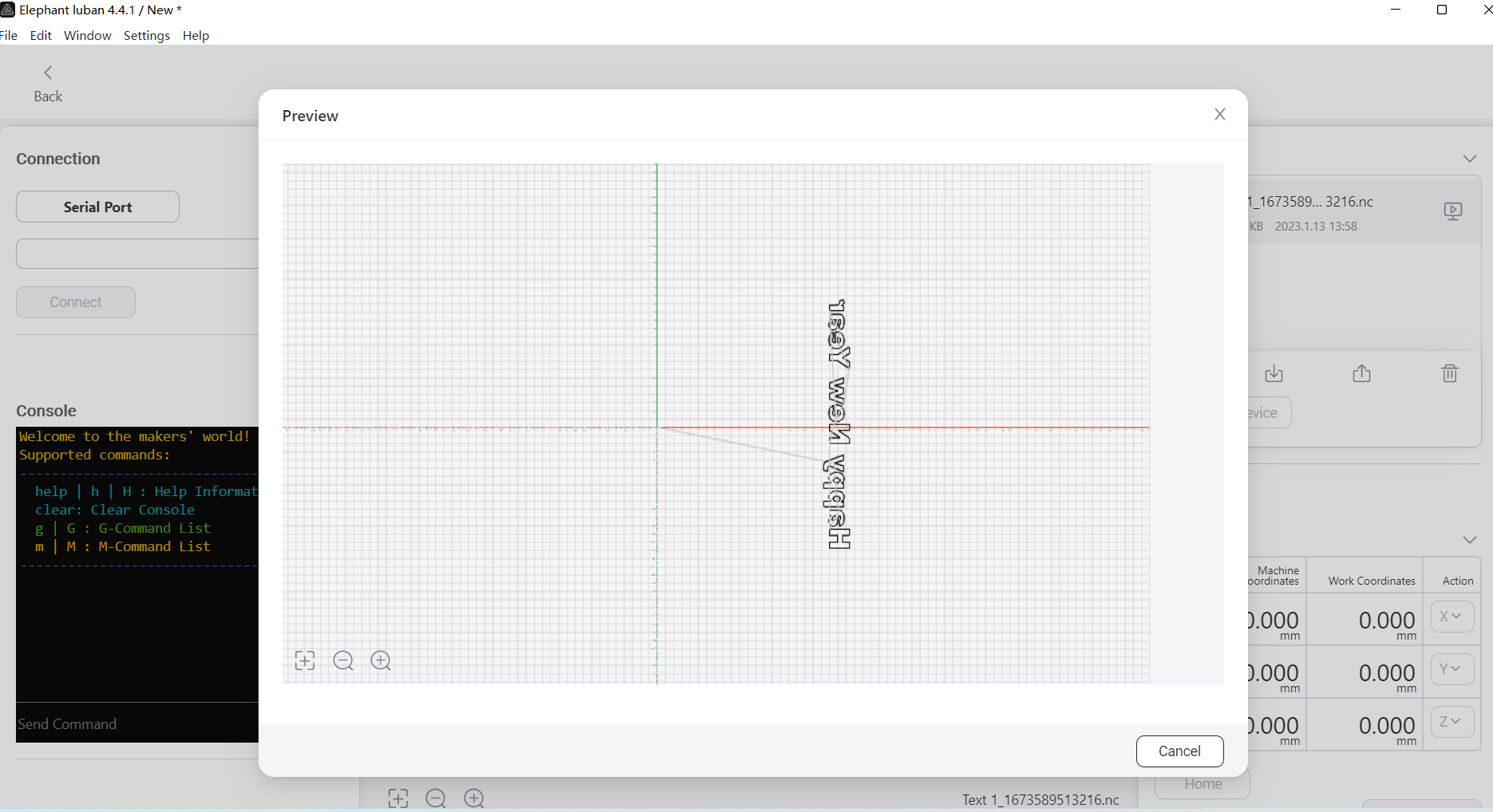
图:luban工作界面
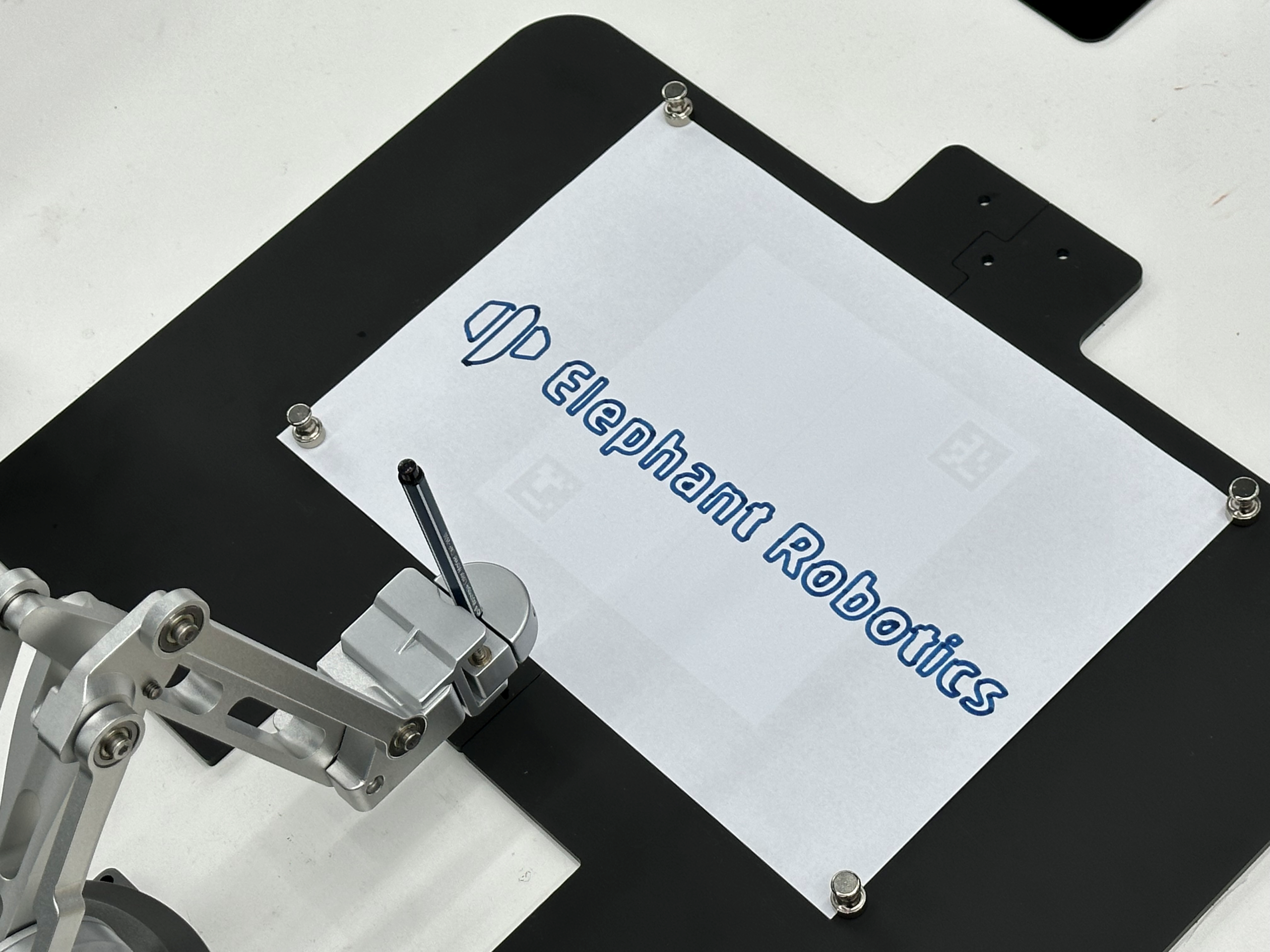
关于这个套装,我们只需要如视频内的操作那样生成一个图案或者文字的路径,发送给ultraArm去执行就能够完成机械臂画画/写字。即使是没有任何编程知识都能够简单轻易的去实现的一个套装。
激光雕刻套装
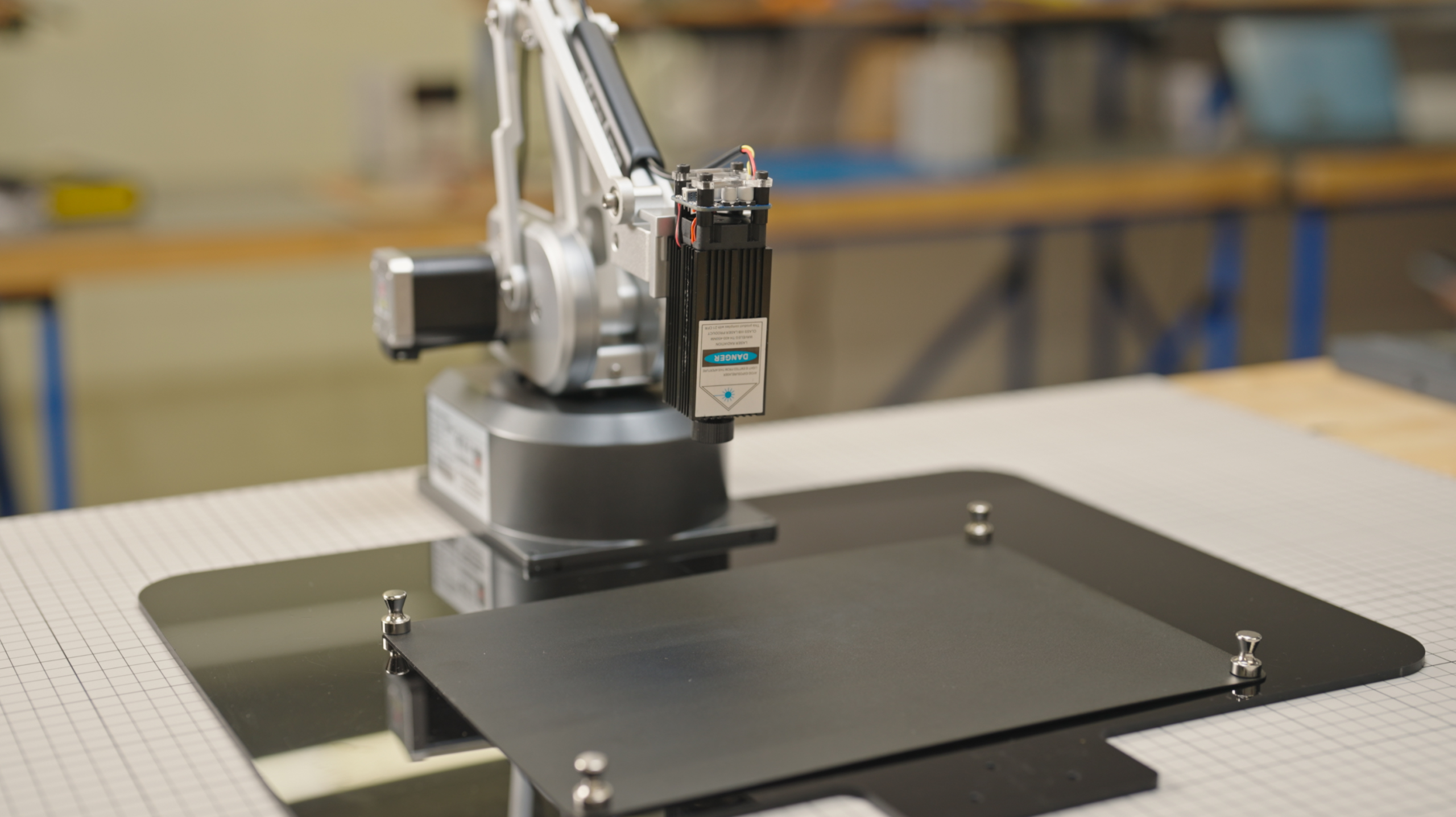
激光雕刻套装,是在机械臂的末端装一个激光雕刻笔,按照规定的路径去进行工作。这个套装的原理跟写字画画的原理有些相似,都是需要用到Elephant Luban去制作图像的路径。

本身激光雕刻是一个相对复杂的工作,需要专业的操作人员来进行操作,从而雕刻出一个精致的工艺品。现在ultraArm 可以将复杂的工作简洁化,从而对专业的需求大大降低,在家里随时随地都能够完成了。
总结
不知道现在的你对ultraArm是否有了更深的认识。
归纳以下几点:
● 简单易用的操作界面: 使用简单直观的操作界面,让用户能够快速上手。
● 人性化设计: 通过人性化设计,使机械臂更加适合人类操作。
● 友好的操作指南: 提供详细的操作指南和教程,让用户能够快速学会。
● 易于维护: 使用易于维护的结构设计,减少用户的维护成本。
● 提供技术支持:提供专业的技术支持和售后服务,确保用户能够顺利操作。
● 制作时间较长:由于机械臂运动速度的原因,在进行激光雕刻或者画画的时候所要花费的时间较长。
● 套装需要优化:在使用套装的时候,发现一些bug会影响体验感,但是不会影响整体的功能
如果你想了解更多关于ultraArm的信息,请在下方留言或者联系我们。



评论(0)
您还未登录,请登录后发表或查看评论