目录: PLC学习笔记(一):概述 PLC学习笔记(二):PLC结构(1) PLC学习笔记(三):PLC结构(2) 以下为正文 如今,电气装置的控制愈发复杂,仅仅依靠低压电器构建逻辑控制电路显得捉襟见肘,而将逻辑控制电路软件化是在满足控制需求前提下降低成本、提高可靠性的重要途经。 那么,我们是选择单片机还是PLC呢?若选择使用单片机,那就意味着我们需
前言 预积分:是一种十分常见的IMU数据处理方法。 与传统的IMU运动学积分不同,预积分可以将一段时间内的IMU测量数据累积,建立预积分测量,同时还能保证测量值与状态变量无关。 如果以吃饭来比喻的话,ESKF像是一口口地吃菜,而预积分则是从锅里先把菜一块块夹到碗里,再把碗里的菜一口气吃掉。 无论是LIO系统还是VIO系统,预积分已经称为诸多紧耦合IMU系统的标准方法。 在ESKF中,将两个GNS
描述 介绍一篇车位检测的文章,是一种端到端的网络结构,在实际使用中很有效。是韩国人发表的期刊文章,最近发现韩国人一些成果真是不错,写的也很清晰。原文名称:End-to-End Trainable One-Stage Parking Slot Detection Integrating Global and Local Information翻译:集成全局和局部信息的端到端可训练的单步骤车位检测和以
购买链接:https://zyesr.xetslk.com/s/1bDNx2 早鸟福利 1(开营前) 前20名报名可享受早鸟价¥159! 2(恢复原价) 20名后恢复原价¥249! 注意: 开课时间:4月29日9时 截止报名:5月19日24时 课程介绍 (扫描二维码可领取优惠券)
1、DS18B20数字温度传感器 本文将使用三段式状态机(Moore型)的写法来对DS18B20进行测温操作,以便了解DS18B20和熟悉三段式状态机的写法。 1.1、概述 温度传感器(temperature transducer)是指能感受温度并转换成可用输出信号的传感器, 是各种传感器中最常用的一种。随着现代仪器的发展,微型化、集成化、数字化正成为传感器发展的一个重要方向。美国DALLA
说明: 本文章旨在总结备份、方便以后查询,由于是个人总结,如有不对,欢迎指正;另外,内容大部分来自网络、书籍、和各类手册,如若侵权请告知,马上删帖致歉。 目录: 一、64位机器汇编代码源文件:datatype.c编译运行结果:二、32位机器汇编代码源文件:datatype.c编译运行结果:三、union与struct源文件:datatype.c编译运行结果:四、sizeof(指针)
RF-LIO: 面向高动态场景的紧耦合LiDAR惯导融合里程计 单位:西安交通大学 针对问题: 实际场景中动态因素的引入造成基于静态假设的LIO严重位姿漂移 提出方法: 提出基于自适应的多分辨率Range Image的动态点移除算法,并使用紧耦合的激光雷达惯导里程计,首先去除移动物体,然后将激光雷达扫描与子图相匹配,构建基于优先移除的面向高动态场景的LIO。 达到效果: 在不同动
qpSWIFTqpSWIFT 是面向嵌入式和机器人应用的轻量级稀疏二次规划求解器。它采用带有 Mehrotra Predictor 校正步骤和 Nesterov Todd 缩放的 Primal-Dual Interioir Point 方法。 开发语言:C 文档:传送门 项目:传送门 2. OSQP OSQP(算子分裂二次规划)求解器是一个数值优化包,用于求解以下形式的凸
视频地址:https://www.bilibili.com/video/BV1of421f7qr?t=73.8 ESP32S3 Sense接入百度在线语音识别 目前这是我使用的ESP32S3官方硬件(小小的身材有大大的力量)只需要35元加摄像头麦克风79元,后期我会整理相关专栏进行Arduino系统学习。有需要可以购买xiao开发板,SeeedXIAO ESP32S3 Sense硬件购买地址:
Kmeans毫无疑问,好用又“便宜”的算法,经常在很多轻量化场景中实现。所谓的“聚类”(Clustering),就是通过欧氏距离找哪些点构成一个簇。假设我们空间中有一堆点,通过肉眼大概可以看出有两簇,思考:我们怎么决定哪些点属于哪一簇,以及每簇的中心分别是什么?那我们可以直接用sklearn的工具进行计算: import numpy as np from sklearn.cluster imp
算法思想提出 Deep Many-Tasks 方法来对一个图片进行多任务车辆分析,包括车辆检测,部分定位,可见性描述和 3D维度估计。论文的主要贡献包括三个方面: 使用图像车辆的特征点来编码 3D 车辆信息。因为车辆具有已知的形状,可以用单目图像重构 3D 车辆信息。我们的方法还可以在车辆部件被遮挡,截断等情况下定位到车辆部件,使用回归的方法而不是 part detector. 预测 hidde
1. 二维小波的分解(dwt2) 二维小波分解原理,采用行列分别一维处理。行处理:每一行为一维信号,通过一维的高低通滤波器dwt分解;列处理:将上述结果的每一列当成一维信号,通过一维的高低通滤波器dwt分解;得到近似分量、水平细节分量、垂直细节分量和对角细节分量四组分量。 1.1 仿写的dwt22.m函数 % 二维小波分解 % 行处理:每一行为一维信号,通过一维的高低通滤波器dwt分解
这篇博文主要介绍多视角三维重建的实用工具COLMAP。为了让读者更快确定此文是否为自己想找的内容,我先用简单几句话来描述此文做的事情: 假设我们针对一个物体(人)采集了多个(假设60个)视角的照片,希望用COLMAP实现:(1)通过不同视角之间的特征匹配算出每个视角的相机位资(内外参);(2) 对物体进行初步的稀疏重建,完成多视角数据的可视化(详见图3)。参考链接:(官方)Github: http
地平线企业命 企业介绍 地平线是行业领先的智能计算方案提供商。得益于前瞻性的软硬结合理念,地平线自主研发兼具极致效能与开放易用性的智能计算方案,可面向智能驾驶以及更广泛的通用机器人应用领域提供全面开放的赋能服务。 在智能驾驶领域,地平
随着Word Embedding在NLP很多领域取得不错的成果,人们开始考虑把这一思想推广到其他领域。从word2vec模型的实现原理可以看出,它主要依赖一条条语句,而每条语句就是一个序列。由此,只要有序列特征的场景应该都适合使用这种Embedding思想。下图表示了不同用户在一定时间内查询物品形成的序列图形,可以看出,物品形成的序列与词形成的序列(语句)有很多相似的地方,因此,人们把Word E
一、模型部署简介 近几年来,随着算力的不断提升和数据的不断增长,深度学习算法有了长足的发展。深度学习算法也越来越多的应用在各个领域中,比如图像处理在安防领域和自动驾驶领域的应用,再比如语音处理和自然语言处理,以及各种各样的推荐算法。如何让深度学习算法在不同的平台上跑的更快,这是深度学习模型部署所要研究的问题。 目前主流的深度学习部署平台包含GPU、CPU、ARM。模型部署框架则有英伟达推出的T
1. ESP32为什么需要多任务 ESP32需要多任务处理主要是因为以下几个原因: edbb4a78-91a1-4704-b54f-4965d500f317例如添加如下代码块: var code = “edbb4a78-91a1-4704-b54f-4965d500f317” 1.并行处理能力:ESP32是一款双核微控制器,拥有两个可以独立运行的处理核心。通过多任务处理,这两个核心可以
1、问题描述 问题是预测 Perrin Freres 标签(以法国的一个地区命名)的香槟月销量。该数据集提供了从 1964 年 1 月到 1972 年 9 月的香槟月销售量,或不到 10 年的数据。这些值是对数百万销售额的计数,有 105 个观察值。 链接:https://pan.baidu.com/s/1DyoZ_xFZeItCfrpX1RTG2g 提取码:1f2
在神经网络模型训练时,有时候我们需要共享不同模型之间的网络参数,下面我将以一个案例展示一下如何共享模型训练参数。 ⭐参数共享模块的模型结构必须完全一致才能实现参数共享 一. 指定共享某一模块 假设我们有以下两个模型: class ANN1(nn.Module): def __init__(self,features): super(ANN1, self).__i
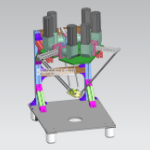
机械设计已经做好了,第一版做为原理验证,计划采用6个42步进电机直驱主动臂,不做减速机构。顶部的固定平台和主动臂用亚克力。电机的固定基座是异形件,用3D打印件,还有末端的小运动平台也是。黑色的从动臂是碳纤维杆。这样机械部分比较简(省)单(钱),缺点是运动范围非常小(鱼眼轴承偏转角度太小了),不过拿来搞原理验证也够了。对于三轴并联机器人,由于是3个主动臂驱动6个从动臂,也就是每个主动臂驱动2个从动臂
第三方账号登入
看不清?点击更换

























第三方账号登入
QQ 微博 微信