UART简介UART是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。在嵌入式设计中,UART用来主机与辅助设备通信,如汽车音响与外接AP之间的通信,与PC机通信包括与监控调试器和其它器件,多用于上位机与下位机的通信。在UART通信中,两个UART直接相互通信。 发送UART将控制设备(如CPU)的并行数据转换为串行形式,以串行方式将其发送到接收UART。只需要两条线
好课推荐:面阵激光雷达SLAM • Jianfee: https://class.guyuehome.com/detail/p_62fb0690e4b0eca59c2375c0/6 *本课程不提供PPT,课程资料请到微信公众号“古月居”后台回复“规划感知资料”获取 该课程已开通专门交流答疑区,点击这里,发帖提问交流 课程目的 低成本激光雷达(如Livox)的快速发展使我们能够实现
一、引言 1、本博文主要目的是将rslidar_to_velodyne功能包的ros1版本转换为ros2版本2、内容会包含ROS1到ROS2迁移技巧,是自己总结的一套简单的流程,可以保证ROS2下的代码试跑成功,如果需要将代码进一步转化为类的实现的方式,自己稍作修改就可以了3、最终会放原始ROS1版本以及修改过后的ROS2版本的代码配置文件和CPP文件供大家对比参考4、本来是想用现成的开源的RO
分类目录:《系统学习Python》总目录 装饰器的代码依赖于内省API和对参数传递的微妙限制。为了完全地通用,原则上我们可以完整模拟Python的参数匹配逻辑,来看看哪个名称以何种模式传入,但是这对于我们的工具来说太复杂了。如果我们能够设法根据所有期待参数的名称集合来匹配按照名称传人的参数,从而判断哪个位置参数真正地出现在给定的调用中,那将会更好。 在函数对象上以及与其关联的代码对象上可用
一、编译并运行imu_utils1 安装依赖项 sudo apt-get install libdw-dev 2 下载imu_utils和code_utilsimu_utils下载地址为:https://github.com/gaowenliang/imu_utilscode_utils下载地址为:https://github.com/gaowenliang/code_utils注意:
一、项目介绍 本项目是笔者参加[立创&传智&黑马程序员&CSDN]的仿生机械狗训练营的作品,以Hi3861作为主控,使用OpenHarmony操作系统作为软件开发底层实现的语音控制四足机器人。具体功能介绍如下:·通过语音指令控制机器人站立、握手、前进、后退、左转、右转、俯卧撑、蠕动、扭头等动作。·通过HC-SR04超声波模块实现避障功能。·通过连接HC-05实现手机APP
参考视频:莫烦python https://mofanpy.com/tutorials/python-basic/multiprocessing/why/ 1.创建进程 # -*- coding: utf-8 -*- import multiprocessing as mp import threading as td def job(a,b): print(
单总线协议简介1-wire 单总线是Maxim 全资子公司Dallas 的一项专有技术。与目前多数标准串行数据通信方式,如SPI/I2C/MICROWIRE 不同,它采用单根信号线,既传输时钟,又传输数据而且数据传输是双向的。它具有节省I/O 口线资源、结构简单、成本低廉、便于总线扩展和维护等诸多优点。1单总线的数据传输速率一般为16.3Kbit/s,最大可达142 Kbit/s,通常情况下采用1
用tensorflow将图片灰度化,很简单的一个问题,几句代码就OK了。但是这里边有很多坑,稍不留神,半天都不一定找得到原因。我下面说说我遇到的坑,希望看到这篇博客的你,别遇到。 先给代码,再介绍我遇到的坑: import tensorflow as tf import numpy as np import matplotlib.pyplot as plt from keras_prep
题目描述 难度:中等 运用你所掌握的数据结构,设计和实现一个 LRU (最近最少使用) 缓存机制 。实现 LRUCache 类: LRUCache(int capacity) 以正整数作为容量 capacity 初始化 LRU 缓存int get(int key) 如果关键字 key 存在于缓存中,则返回关键字的值,否则返回 -1 。void put(int key, int value)
前言今天接着之前的智能车硬件部分,记录智能车控制部分的个人理解,本文采用自动控制原理来分析智能车的方向控制。 自动控制理论为了更好地理解“控制”,我们复习一下自动控制原理的相关理论知识。 人工控制系统首先,通过分析一辆真正在道路上行驶的汽车来开始今天的话题;汽车能够在道路上正常行驶是依托人的控制,从自动控制原理的角度来看人和车组成了一个人工控制系统;其中车的行驶姿态作为系统的被控量,车保持在道
【FastBond2阶段1——基于ESP32C3开发的简易IO调试设备】 1. 功能介绍 2. 主要元器件介绍 2.3.1 WS2812: 2.3.2 90舵机: 2.3.3 SSD1306: 2.2.1 旋转编码器: 2.2.2 模拟ADC: 2.2.3 GPIO接口: 2.1 主控板:CORE ESP
一、前言 一般来说使用IO作为设备的按键输入就够用了 ,但是我就是想实现制作的按键键盘就像按实际键盘的某些按键一样,这样在上位机处理就容易很多,直接调用键盘类函数就可以了。 而且自己根据需求可以自定义按键数量,按键功能,我这里制作一个小数字键盘,增加了Delete按键,使用的是红轴机械按键,效果如下 二、环境 stm32f1 keil window10 三、正文
参考视频:【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程_哔哩哔哩_bilibili 参考文档:http://www.autolabor.com.cn/book/ROSTutorials/ 导航实现03_路径规划 毋庸置疑的,路径规划是导航中的核心功能之一,在ROS的导航功能包集navigation中提供了 move_base 功能包,用于实现此功能。 1.move_bas
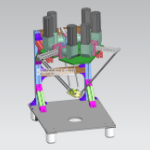
6轴并联机器人,6轴运动展示 6轴并联机器人,6轴运动展示,包括XYZ轴方向的移动,和围绕XYZ轴的旋转,每一组的2根驱动臂是分别驱动的,这也是有6个自由度的关键。伺服电机驱动的工业级产品正在开发中,可用于生产线上产品的捡拾,装配,和搬运 6轴并联机器人
近期在部署3d稀疏卷积,需要对Rulebook与weights的计算进行速度优化,先研究下cuda矩阵乘法,特此记录下: CPU void matrix_multiply_cpu(const float *A, const float *B, float *C, int M, int N, int K) { for (int i = 0; i < M; ++i)
在嵌入式开发领域,选择一款合适的开发工具至关重要。而VSCode作为一款轻量级、强大的编辑器,已然成为开发者的首选。 本文将推荐一些实用的、与我们嵌入式开发相关的VSCode插件。 serial terminal 这款插件提供了一个简单的串口终端,可以帮助我们轻松地与串口设备进行通信。它支持多种波特率和数据位格式,并且可以轻松地发送和接收数据。 GitLens GitLens 是
1.github官网下载源码2.配置深度学习环境3.下载模型4.照片上色代码 from deoldify import device from deoldify.device_id import DeviceId #choices: CPU, GPU0...GPU7 device.set(device=DeviceId.GPU1) from deoldify.visualize imp
win10似乎不太支持mujoco210+,但是如果直接命令行 pip install mujoco-py 就会安装上适配于mujoco210的mujoco-py,所以还是要手动装 参考链接:https://zhuanlan.zhihu.com/p/383655571 1.下载安装mujoco150 链接:https://www.roboti.us/index.html 下载mjpro15
几何法与代数法都属于位置级的逆运动学解法,即最终所求得的是机械臂关节位置变量的解析表达式,这些方法针对不同机械臂的具体解算过程是不一样的,而且机械臂必须满足一个必要条件,即机械臂的逆解存在解析解。前面的章节中我们已经研究过,并不是所有机械臂的逆解都存在解析解,因此,需要其他的方法求解该类机械臂的逆解。 下面,我们来看另外一种机械臂的逆运动学解法:速度级的雅可比方法(Jaco
第三方账号登入
看不清?点击更换






















第三方账号登入
QQ 微博 微信