

本文主要从数学方法的角度来证明
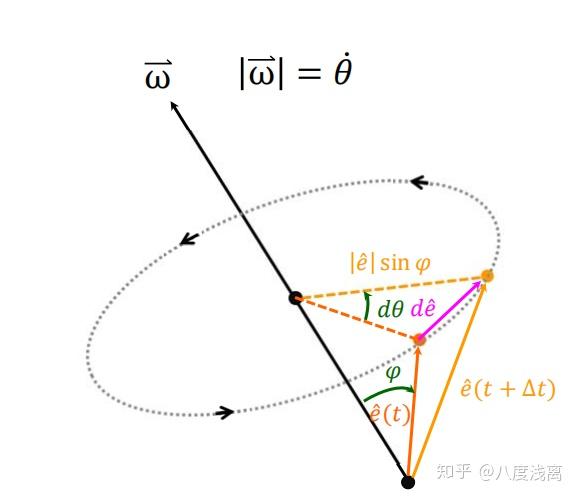
这里的w其实是我们在最开始提到的
。
所以本文也将讲明其物理意义。
- 首先,我们来看一些纯数学知识。
正交矩阵。
反对称矩阵。
。
由前面知识我们知道,旋转矩阵R为3x3的正交矩阵。有,
(1)
对(1)求导有
(2)
对(2)式改写有,
(3)
定义
(4)
由式(4)得,
S为反对称矩阵。又由于R为正交矩阵,故正交阵的倒数与反对称矩阵之间存在如下特性,
(5)
- 其次,来看S在旋转中的作用。
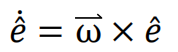
先说结论: 角速度矩阵

(6)

(7)
换成速度符号有,
(8)
将式子(6)带入(8)中有,
(9)
利用(5)式有
(10)
其中S的上下标表示他是与
有关的反对称矩阵。
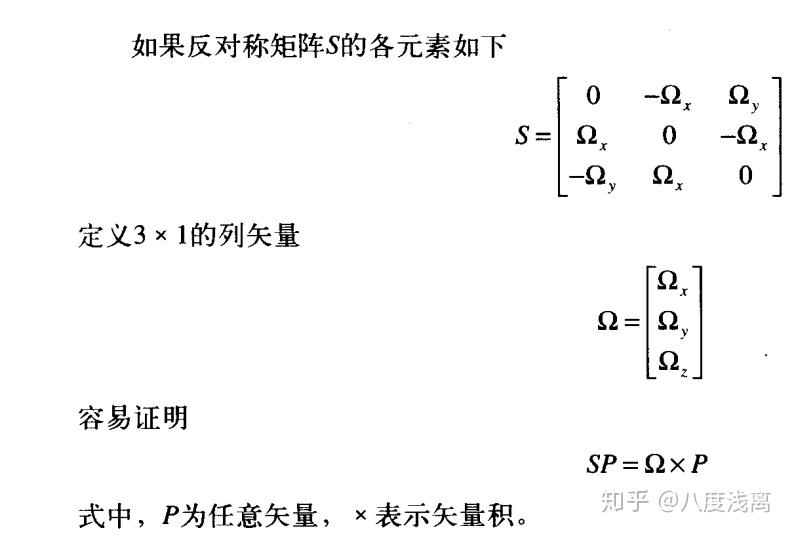
- 角速度矩阵S与叫速度矢量Ω
先了解向量叉乘与矩阵叉乘
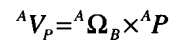
然后就很容易得推出,
将结论带回(10)式也就有
- 角速度矢量的物理意义
Ω可以通过旋转矩阵的直接求导求得!
其公式的推导参考旋转变换(一)旋转矩阵_Frank的专栏-CSDN博客_c/c++ https://blog.csdn.net/csxiaoshui/article/details/65446125
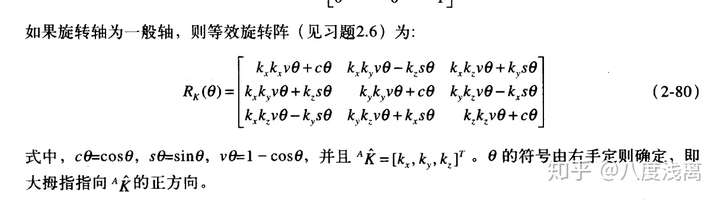
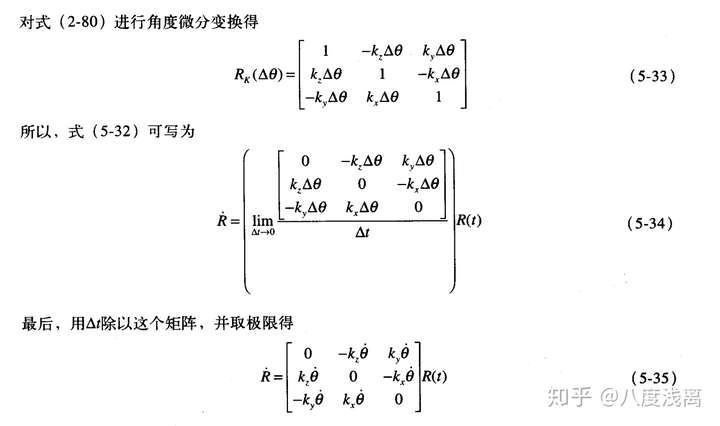
对式(2-80)进行角度微分变换,
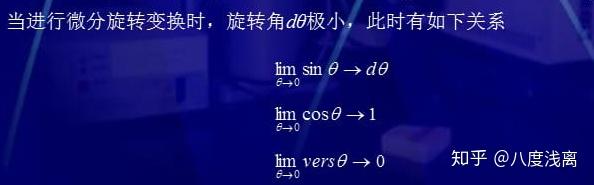
故有,




评论(0)
您还未登录,请登录后发表或查看评论