

刚学到这里。
想把雅可比和动力学部分补上,仅适合回顾瞎看。有不对地方请指出。
https://link.zhihu.com/?target=https%3A//www.bilibili.com/video/BV1Vt41157jp%3Fp%3D1
1. 引言
扩展静态定位问题,研究刚体的线速度与角速度,并用这些概念去分析机械臂的运动
2. 时变位置和姿态
速度--位置矢量的倒数
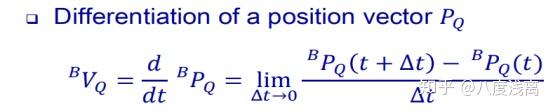
Q相对于坐标系{B}的微分(说明矢量相对于哪个坐标系求导)
B:求导运算的坐标系
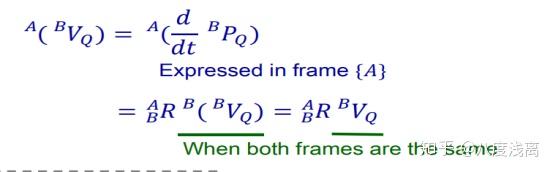
A:描述速度矢量的坐标系
当求导与描述坐标系相同时,不需要给出外层坐标=

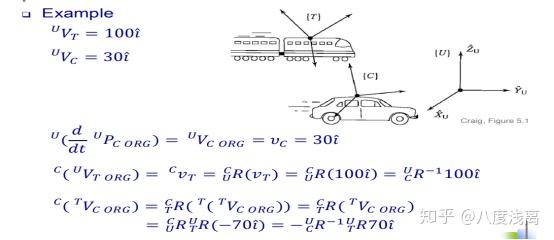
坐标系原点的速度,在世界坐标系中微分
例子:
角速度矢量(旋转运动)
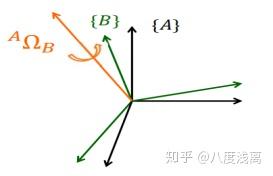
描述了坐标系{B}相对于坐标系{A}的旋转
其方向表示{B}相对于{A}的瞬时转轴, 大小表示旋转速率
同速度有:
和
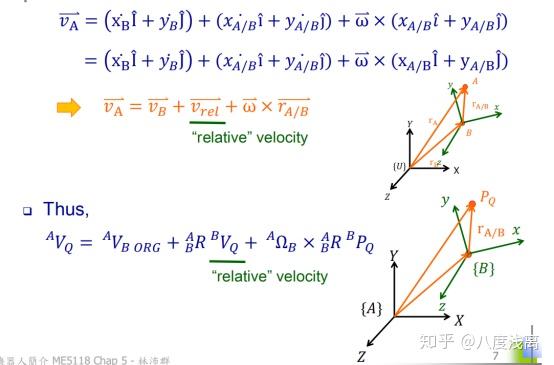
3.刚体的移动
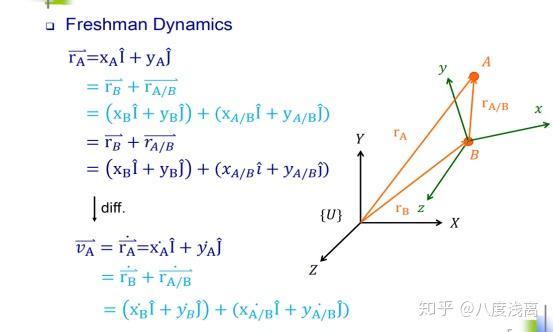
说明:浅蓝色表示使用的是世界坐标系(I、J)
蓝表示使用了世界坐标系{U}和{B}(i,j)
仅做表示用,具体计算还需转化到统一坐标系。
注意:微分时不仅要对分量前面的数字微分,还需对(大I,大J,小i,小j)微分。由于大I、J不动,故微分为零,小i、j做旋转,故微分不为零。
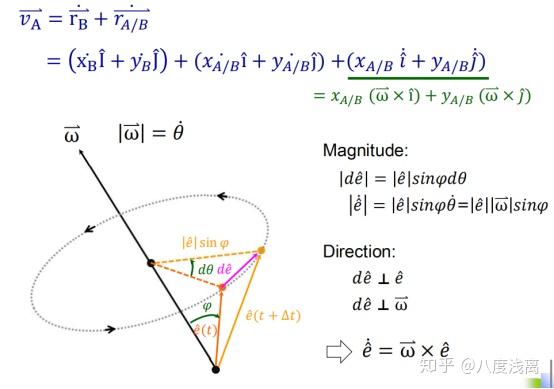
对微分为

的理解:参考角速度矢量。此处相当于{B}绕W轴旋转,e(t)为单位向量(可理解为i轴或j轴)。旋转成果理解为一个甜筒的一周。两个方向的垂直易得,大小易得。根据叉乘定义,得出结论。


评论(0)
您还未登录,请登录后发表或查看评论