

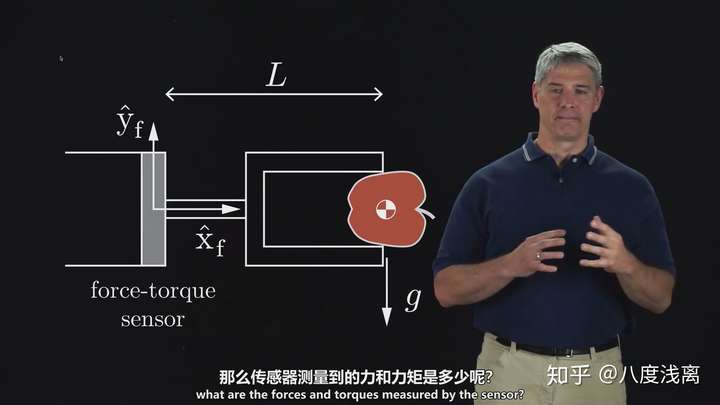
机械手抓着一个苹果,在腕关节出安装一个力-力矩传感器来测量该处{f}力与力矩,那么该处的力与力矩有多大?
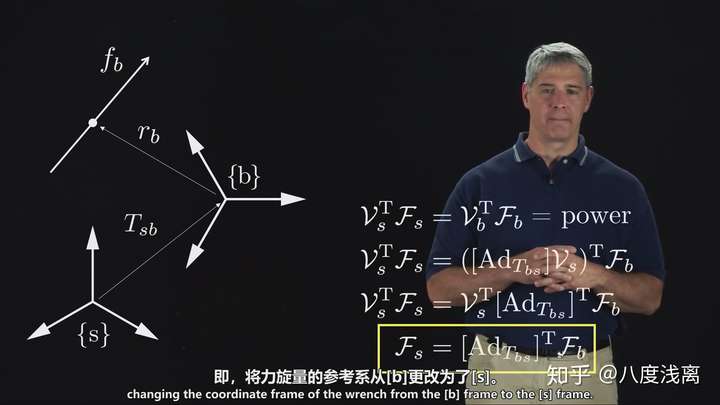
来看一下坐标系{s}与作用在坐标系{b}中的力。其中 的作用线通过
点。此时会产生一个力矩
。像运动旋量一样,我们将力与力矩统合起来构成力旋量:
(运动旋量是角速度在上面,所以力旋量需要把力矩放在上面)。

此时我们已经求得 ,那么如何求的
呢。系统的功率与所选取的参考坐标系是无关的。
所以有
故可以得出
我们将 称为物体力旋量,将
称为空间力旋量。
计算上面抓苹果的例子有:
syms L m g
F_a=[0;0;0;0;-mg;0]
R_af=[1 0 0;0 1 0;0 0 1]
P_af=[-L;0;0]
T_af=RpToTrans(R_af,P_af)
AdT=Adjoint(T_af)
F_f=AdT'*F_a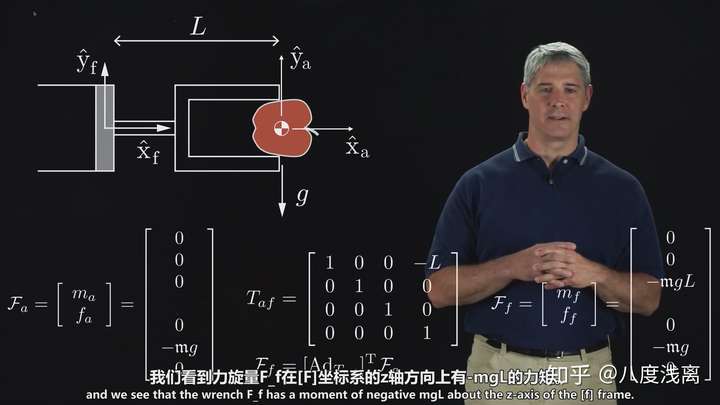


评论(0)
您还未登录,请登录后发表或查看评论