

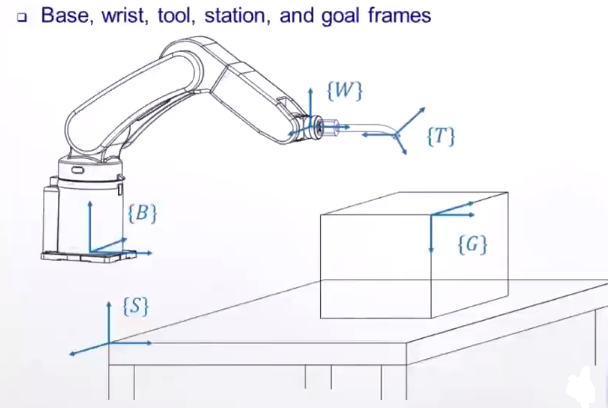
解决一般的手臂问题:场景,抓取goal放到固定位置(现在先考虑如何准确夹取问题)
- {B} 基座frame;
- {W} 手腕的frame;
- {T} 末端执行工具的frame;(施工)
- {S} 静止物,桌子的frame;
- {G} 目标物的frame;Tool如何与goal进行对应..
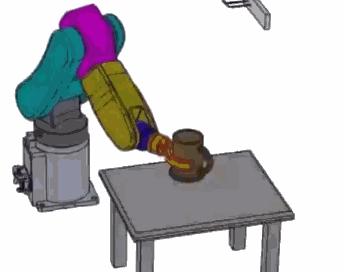
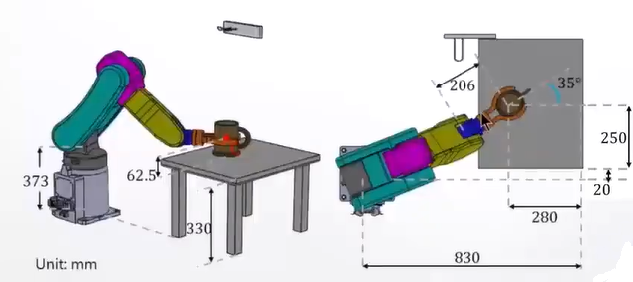
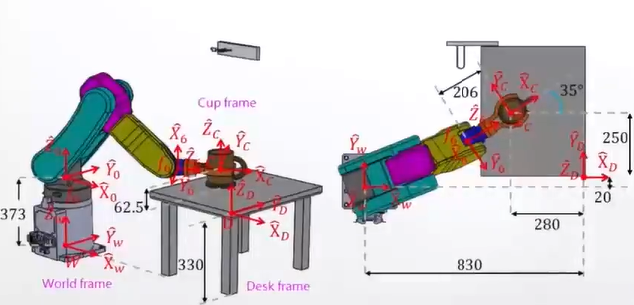
SITUATION: 机械手臂夹住放在桌上的杯子,移动手臂将杯子挂到墙上的杯架。
P.S. 一般杯子相对桌角的距离,可以通过顶部相机系统,得到相对关系。
现阶段任务:
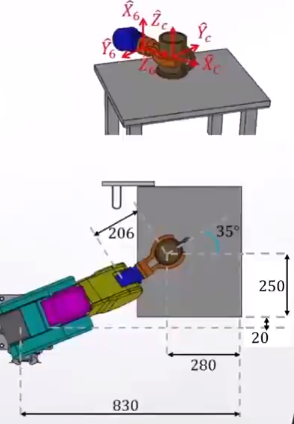
为了使RRRRRR手臂能以下图姿态夹住杯子(任务起始点为C),手臂的6个joint angles需要是多少呢?
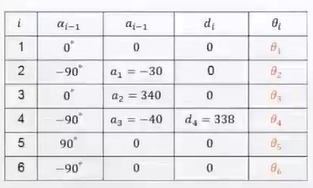
STEP1: 定义DH Table
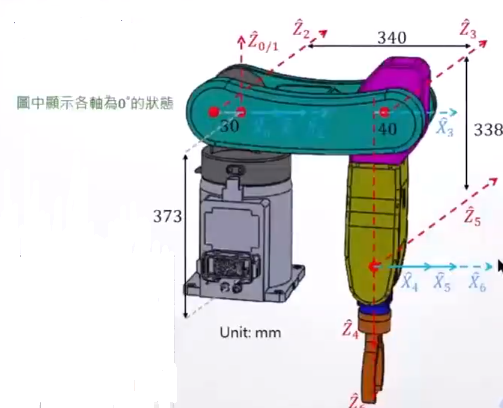
目视即可得到具体的DH Table:
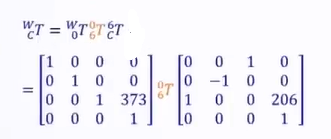
STEP2: 先找出cup相对于world的关系![[公式]](https://www.zhihu.com/equation?tex=%7B%7D%5Ew_cT) ,子进一步找出6相对于0的关系
,子进一步找出6相对于0的关系 ![[公式]](https://www.zhihu.com/equation?tex=%7B%7D%5E0_6T) 。
。
首先关于可以由【桌子相对于world】和【杯子相对于桌子】的相对关系得到:

其中可以由影像系统(视觉系统)俯拍得到。
进一步分析(已经求出):
通过该式,我们可以求出:(Inverse)
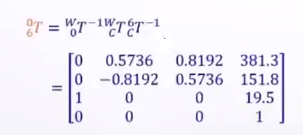
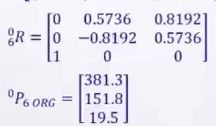
可以分离出移动和转动矩阵:
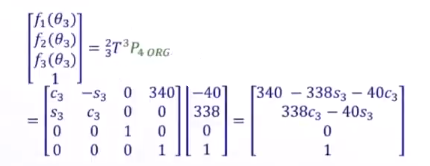
STEP3:找出 ![[公式]](https://www.zhihu.com/equation?tex=%5Ctheta_1%E2%80%94%5Ctheta_6) (根据之前的Pieper's Solution)
(根据之前的Pieper's Solution)
- 根据位移矩阵,根据
求得角度:
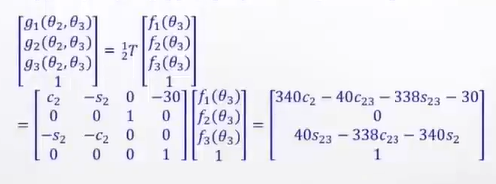
- 将r和z列出来:

- 根据上式,求得
:

- 根据r式,求解出
:

- 根据x式,求解出
:

- 在根据求出的
:
求解出 我们可以方便知道,手臂各个joint angles为多少时,可以抓住杯子。
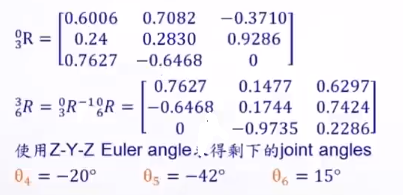
ZYZ Euler Angles求法:


评论(0)
您还未登录,请登录后发表或查看评论