

0. 简介
对于传感器选型,很多新手乃至工程师也不太清楚,不同价位以及不同设备之间的区别。这里作者想根据自己的一些经验,以及网上的一些资料,给各位读者提供一些建议,以及这些设备要怎么去使用。
1. 相机
1.1 usb相机(业余&消费)
USB摄像机是采用USB接口的安防摄像机,即插即用,傻瓜式操作,无需采集卡,无需电源,免拆机箱、支持笔记本电脑。与传统的监控摄像机相比成本更低,而且可以远程网络观看。方便实用,操作简单。
-
优:很容易整合。
-
优:可以做很多的离线的图像工作(曝光控制,帧率等)。
-
优:提供输入/中断功能,可为您节省计算应用程序时间(例如,在新帧上中断)。
-
缺:由于USB总线使用CPU时间,如果使用100%CPU,这会影响您的应用程序。
-
缺:对于使用硬件视觉管线(硬件编码器等)不是最佳的。
-
优:可以长距离工作(最高可达USB标准)。
-
优:可以支持更大的图像传感器(1英寸或更高,以获得更好的图像质量和更少的噪音)。

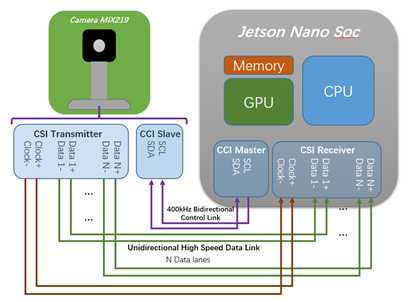
1.2 MIPI CSI汇流排相机(消费)
CSI-2接口规范是由MIPI(Mobile Industry Processor Interface)联盟组织于2005年发布的关于相机串行接口。MIPI(Mobile Industry Processor Interface)是2003年由ARM, Nokia, ST ,TI等公司成立的一个联盟,目的是把手机内部的接口如摄像头、显示屏接口、射频/基带接口等标准化,从而减少手机设计的复杂程度和增加设计灵活性。MIPI联盟下面有不同的WorkGroup,分别定义了一系列的手机内部接口标准,比如摄像头接口CSI、显示接口DSI、射频接口DigRF、麦克风/喇叭接口SLIMbus等
-
优:根据CPU和内存使用情况进行优化,以便将图像处理并存入内存。
-
优:可以充分利用硬件的视觉管线。
-
缺:支持较短距离(通常不超过10cm)。除非您使用序列化系统(GMSL,FPD Link,COAXPress,Ambarella),但这些系统目前尚不成熟并且需要定制。
-
缺:通常与手机相机模块的小型传感器一样,要不就得多花点钱去定制。通过TX1/2中的硬件去噪降低小传感器的额外噪音。
-
优:可执行底层访问与控制传感器/摄像头。
1.3 以太网相机(机器人&车规)
美国自动化成像协会(AIA)推出了GigE Vision标准,该标准是基于千兆以太网通信协议开发的,经现有的以太网线实现快远距离速图像传输,能实时快速、高带宽地传输大型图像,传输速率达125MB/秒,传输距离达100米。

GigE工业相机可以统一机器视觉产品中的几乎所有工业相机的协议,同时还容许其他组织在其基础上开发其他兼容的软件和硬件。目前,有很多产品都可以支持GigE Vision标准。

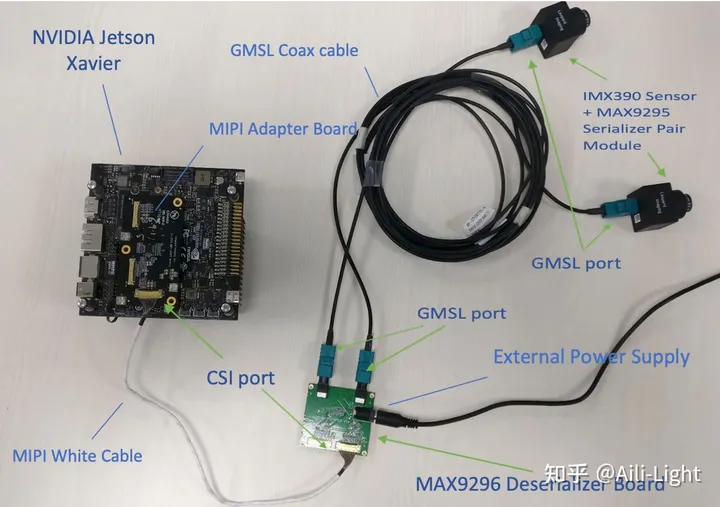
1.4 gsml相机(车规)
LVDS数传接口主要协议分为两种:GMSL和FPD Link,这两种接口在汽车视频传输方面的应用是比较广泛的,尤其是Camera和处理器之间的链路,通过STP或者同轴电缆能使整个链路达到15m。
GMSL 是 Maxim 公司推出的一种高速串行接口,适用于视频、音频和控制信号的传输,使用 50Ω 同轴电缆或 100Ω 屏蔽双绞线(STP)电缆时的距离可达 15m 或更长。
以ADAS摄像头为例,这也是GMSL应用的主要领域。一般来讲,摄像头除了对外发送捕获到的图像数据外,还会发送帧同步信号,行同步信号,像素时钟等信息,此外还有电源供给等等,它是由许多信号线组成的一个并行总线,并行总线在高速的数据传输过程中,是不占据优势的,因此我们需要将这些并行的信号合并为串行信号,再通过更高频率进行传输。
PCIE采集卡(图7)就是专门为PC电脑/工控机设计的GMSL摄像头接入设备。PCIE采集卡的具有高带宽、多通道的特点,其通用性好,实时性高,广泛应用于自动驾驶的研发和数据采集上。

如表2所示,1M(100万像素) - 8M(8百万像素)摄像头的数据传输带宽在655Mbps – 4.4Gbps。从带宽的限制来看,USB3.0最高只能支持到2M,以太网最高支持到1M,只有PCIE可以满足所有的传输需求。
1.5 FPD Link(车规)
FPD-Link III 串行总线方案支持通过单个差分链路实现高速视频数据传输和双向控制通信的全双工控制。 通过单个差分对整合视频数据和控制可减少互连线尺寸和重量,同时还消除了偏差问题并简化了系统设计。
FPD Link是TI公司的一种串行总线解决方案。与GMSL一样,它可以使用50Ω同轴电缆或100Ω屏蔽双绞线(STP)电缆以低延迟传输未压缩的视频和控制数据。

借助 FPD-Link™ 串行器和解串器,为汽车系统中的各种视频接口(包括用于高级驾驶辅助系统 (ADAS) 的摄像头和信息娱乐系统显示屏)简化高分辨率信号的设计和传输。我们的 FPD-Link 摄像头串行器/解串器支持通过单根低延迟电缆传输未压缩的视频、控制信号和电源。我们的 FPD-Link 显示串行器/解串器支持全 1080p、2k 和 3k 高清显示屏以及设备级 HDCP 密钥,同时还提供自适应均衡以补偿电缆老化和温度变化
具体的车载发展史可以看一下这篇文章汽车电子数据传输协议CAN、CAN FD 、A²B、Ethernet100Base-T1&Ethernet1000Base-T1、FPD-LINK、GMSL的端口名词解释汇总
2. IMU
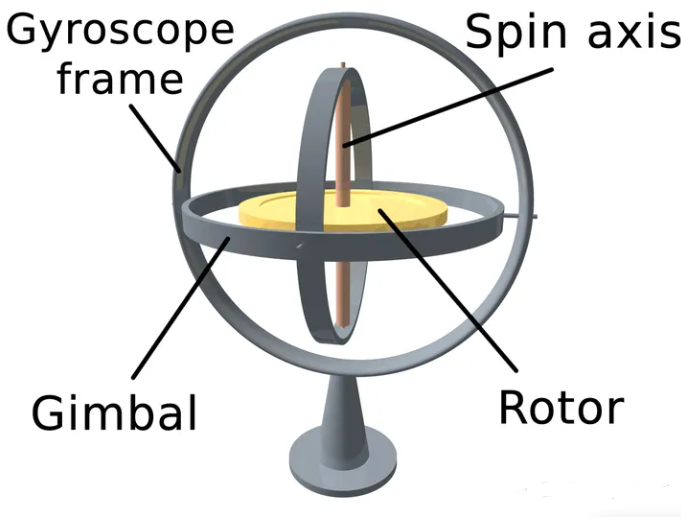
2.1 惯性测量单元
惯性测量单元(Inertial measurement unit,IMU),是测量物体三轴姿态角以及加速度的装置。IMU通常包含陀螺仪 (Gyroscope)、加速度计 (Accelermeters),有的还包含磁力计(Magnetometers)。陀螺仪用来测量三轴的角度/角速度,加速度计用来测量三轴的加速度,磁力计提供磁场朝向信息。
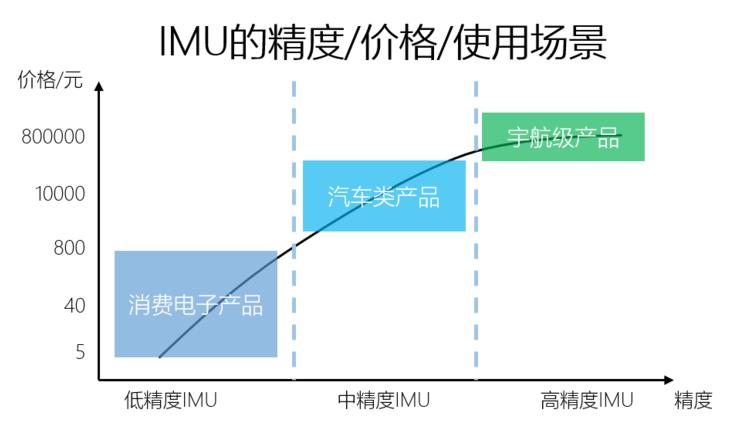
2.2 IMU分类
对于IMU而言,这方面技术壁垒高、份额高度集中,其主要分为激光、光纤和MEMS式三种。
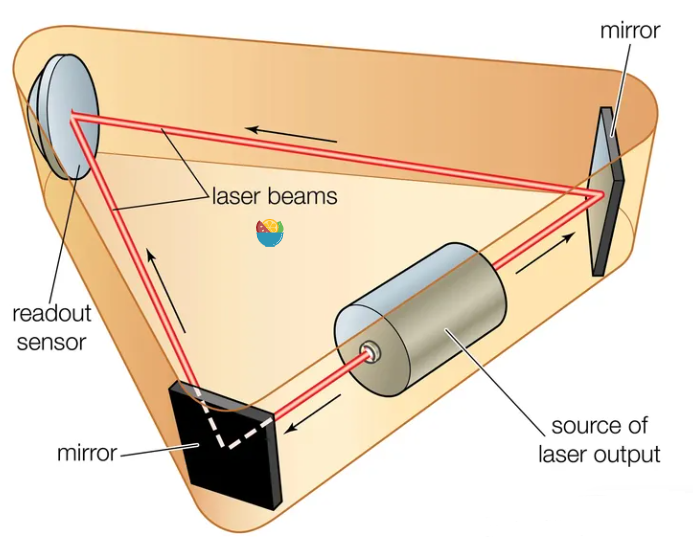
2.2.1 Ring Laser Gyro (RLG) IMU-环形激光陀螺仪(车规+可用作真值)
1913年,法国科学家George Sagnac发现:当光束在一个环形介质通道中行进时,若环形通道本身具有一个转动的角速度,那么光线沿着通道转动方向行进所需要的时间,要比沿着这个通道转动相反的方向行进所需要的时间要多。而利用Sagnac效应的两种陀螺仪分别是环形激光陀螺仪和光纤陀螺仪。这两种方法制作的雷达精度更高,但是价格也是更多的
环形激光陀螺IMU使用环形激光器和光纤传感器来测量角速度。它基于光学旋转的原理,通过测量激光光束在环形路径上的相位差来计算角速度。
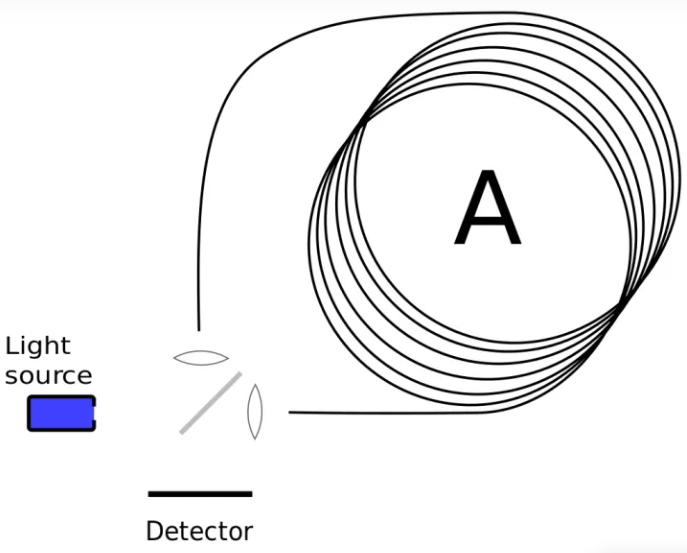
2.2.2 Fiber Optic IMU-光纤陀螺仪 (车规+可用作真值)
光纤IMU利用光纤传感器来测量物体的加速度和角速度。它基于光纤的干涉原理,通过测量光纤中的光程差来计算运动参数。这个设计更加巧妙,其直接通过光纤来制造环形介质通道。相比前者,不需要光学镜的精密加工、光腔的严格密封,而且从根本上避免了激光锁定问题。
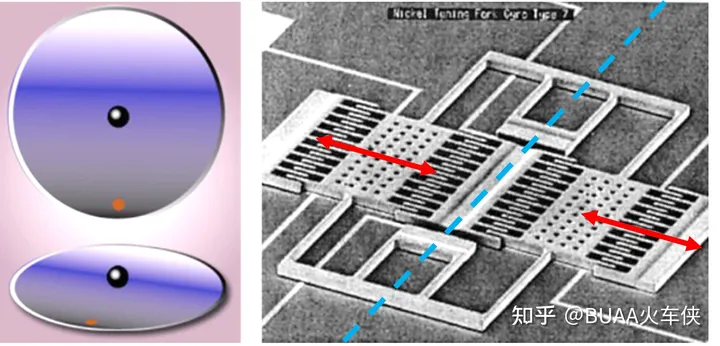
2.2.3 MEMS微机IMU(消费-车规)
MEMS(Micro-Electro-Mechanical Systems)是一种微电子机械系统,其中包含微小尺寸的机械结构和电子元件。MEMS IMU(惯性测量单元)是一种基于MEMS技术的惯性传感器,用于测量加速度和角速度。
MEMS IMU的工作原理基于微机电系统中的微机械结构和电子传感器。采用14 kHZ的交变电压使柔性振子,沿图中红色箭头方向,发生周期性的共振。当检测单元沿蓝色轴线存在转动时候,正在直线运动的柔性振子就会受到科氏力而产生偏移,从而产生14kHZ的上下的震荡,使用电容传感器检测这一振幅,即可得到所受到的科氏力,进而得到旋转的角速度。
主要包括以下几个方面:
-
加速度测量:MEMS IMU使用微机械结构中的微小质量块(mass)和弹簧系统来测量加速度。当IMU受到加速度时,质量块会受到惯性力的作用而发生位移,这个位移会通过电容、电阻或压电效应等电子传感器来转化为电信号,从而测量加速度的大小和方向。
-
角速度测量:MEMS IMU使用微机械结构中的微小陀螺仪(gyroscope)来测量角速度。陀螺仪可以通过惯性力或旋转力的作用来感知角速度。通常,MEMS陀螺仪通过微小的振动结构、压电效应或光学传感器等方式来测量角速度的变化。
-
信号处理和输出:MEMS IMU的电子元件负责将机械运动转化为电信号,并进行信号处理和放大。这些处理电路可以将微小的机械运动转化为可测量和可用的电信号。最终,IMU将测量到的加速度和角速度数据输出给系统进行进一步的应用。
2.3 主要厂商
MEMS-IMU以海外的Honeywell、ADI和Northrop Grumman为主,三家占全球55%;国内处于追赶状态,目前以明皜传感、芯动联科、美泰科技为代表,汽车用IMU模块以华依、导远为主。
第一梯队:苏州固锝(明皜传感)、芯动联科(今晨上市)、华依科技(IMU定点多家车企),纯MEMS-IMU。
第二梯队:星网宇达、华测导航、北斗导航、理工导航等以激光和光纤式为主,MEMS较少,主业军工强相关或对特定客户拓展存在影响。
第三梯队:敏芯股份(仅加速度计)、赛微电子等
一些常用的组合导航选型可以参考这篇文章:组合导航选型。
3. 激光雷达
主要内容已经在《从ROS1到ROS2无人机编程实战指南》一书中已经详细讲述了。这里大概描述下,3D激光雷达主要有
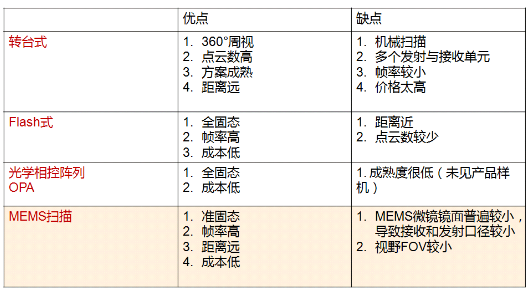
3.1 机械式扫描式激光雷达(消费)
这种三维激光雷达使用多个激光束同时发射,并通过旋转扫描器或光学组件来定向这些激光束。它们可以同时获取多个角度的点云数据,以提高三维感知的效率和精度。旋转多束激光雷达通常具有较高的分辨率和较长的测量距离,但相对较复杂和昂贵。
3.2 固态式激光雷达—Flash(消费-车规)
Flash激光雷达,也称为全景激光雷达,采用一次性发射大量激光束的方式。它们使用光电探测器阵列来记录激光束的反射时间,并通过测量时间差来计算距离。Flash激光雷达具有高速、全景扫描和较短的测量时间,但通常具有较低的分辨率和较短的测量距离。
Flash激光雷达相当于用闪光灯把激光打出去,用探测器来接收信号。由于是全固态的,体积小了很多,但问题是近距离会过曝,远距离测不到(能力不够),所以目前一般flash雷达测距在50米以内
3.3 OPA激光雷达(消费-车规)
OPA激光雷达采用光学相位阵列(Optical Phased Array)技术来定向和控制激光束。它们使用光学元件和相位调制器来调整激光束的相位和方向,并通过测量时间差来计算距离。OPA激光雷达具有高速、全景扫描和较长的测量距离,同时具备较高的分辨率和灵活性。
但是OPA(光学相控阵),类似于采用射频信号的毫米波雷达,用相控阵聚焦来扫描。它是在光学波长尺度上实现的,所以比毫米波技术难度大,也有公司在做方案。
3.4 MEMS激光雷达(消费-车规)
MEMS激光雷达采用微机电系统(MEMS)技术来实现微小化的激光发射器和探测器。它们使用微小的振动镜或阵列来定向激光束,并通过测量时间差来计算距离。MEMS激光雷达具有小尺寸、低功耗和较低的成本,但通常具有较短的测量距离和较低的分辨率。
MEMS激光雷达实现64线,只需要MEMS微镜把单个激光器发出的脉冲扫描成的点阵能组成64条线就可以了,所以非常容易实现高分辨率,体积也非常小。未来MEMS激光雷达的成本有望控制在千元人民币以内。
4. 参考链接
https://zhuanlan.zhihu.com/p/497871767
https://www.sensing-world.com/GMSL_Camera
https://www.zhaolong.com.cn/blog/article_828
https://xueqiu.com/9597204680/254598068
https://zhuanlan.zhihu.com/p/220567490
https://laser.ofweek.com/2021-05/ART-8500-2400-30498489.html


评论(0)
您还未登录,请登录后发表或查看评论