
STM32平衡小车已结项
1、完成2种类型小车的设计:二轮差速转向小车、四轮舵机转向小车。 2、针对药房送药、自动泊车、坡上定速起步、无人驾驶等多种使用场景进行项目开发。 3、对标大疆,优化线路连接,运用FreeROS进行嵌入式操作系统开发,并实现车机协同,配合无人机实现协同控制。
项目描述
STM32平衡小车项目是一种基于STM32单片机的自平衡小车,它使用两个电机来控制小车的运动,其中一个电机控制小车的前进和后退,另一个电机控制小车的左右转动。该项目的目的是让小车能够自动保持平衡并能够在平坦的地面上行驶,同时还可以通过遥控器进行远程控制。
该项目的核心是使用一个IMU(惯性测量单元)传感器来测量小车的倾斜角度,并使用PID算法来控制电机的速度和方向,从而使小车保持平衡。为了实现远程控制,该项目还可以添加一个无线通信模块,例如蓝牙或Wi-Fi模块,以便通过智能手机或电脑进行控制。
该项目需要的硬件和材料包括:STM32开发板、IMU传感器、电机驱动模块、直流电机、车轮、电源电池、无线通信模块、螺丝和螺母等。为了完成该项目,还需要一定的电子硬件和编程知识。需要设计电路板并将所有组件连接到一起,以及编写控制算法和控制程序。
通过该项目的学习,可以深入了解如何使用STM32单片机来控制电机,并了解PID算法在实时控制系统中的应用。同时,该项目还可以帮助学习者提高硬件设计和编程能力,了解物理运动的基本原理,并培养团队合作精神。
硬件和材料列表
硬件:
- STM32开发板
- 直流电机(两个)
- 驱动电机的H桥模块(一个)
- 超声波传感器(一个或两个)
- 舵机(用于控制超声波传感器的旋转)
- 蓝牙或Wi-Fi模块
- 电池或电池盒
- 电池连接器或线缆
- 电池充电器
材料:
- 小车底盘
- 轮子(两个)
- 电线
- 面包板
- 螺丝、螺母和螺栓
- 热缩管
- 绝缘胶带
- 胶水
开发环境
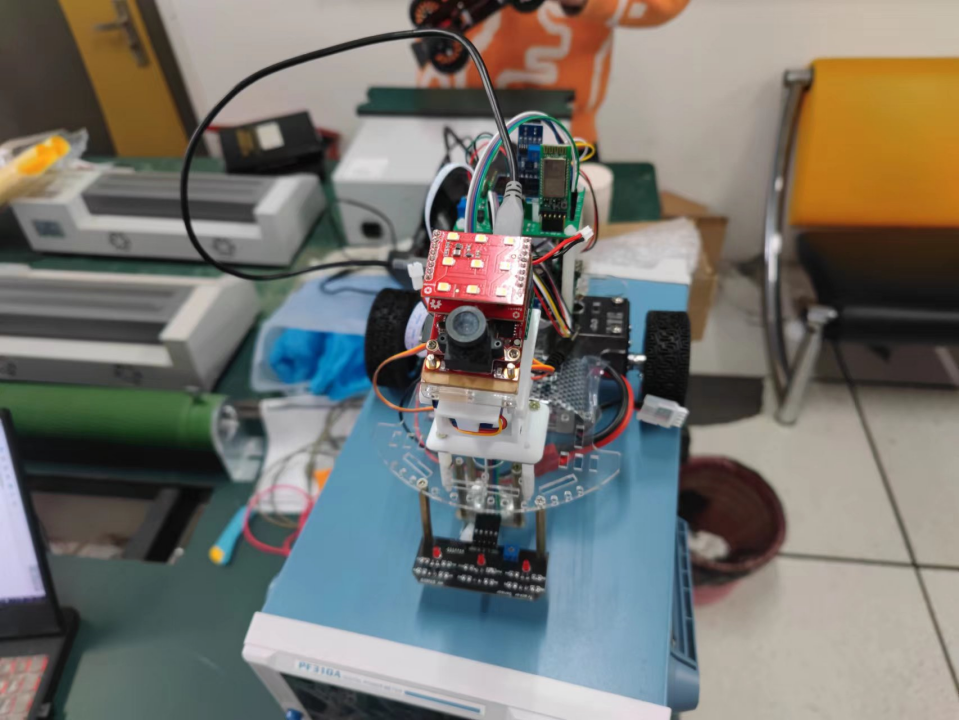
安装部署过程展示
项目笔记
旭日X3派Ubuntu20.04Desktop环境安装时遇到的问题和解决方法(适用于大部分情况)旭日X3派学习笔记2:利用Shell语言来操作Ubuntu系统 | 下载IDE运行测试工作代码 | Pybluez库包安装问题求解答
旭日X3派学习笔记3:旭日X3派和STM32F103联合项目开发1.0
旭日X3派和STM32F103联合项目开发2.0
旭日X3派和STM32F103联合项目开发3.0
安全事项
电源连接参考文献
团队简介
这是一个由多名电子工程专业的学生组成的STM32平衡小车团队。该团队致力于设计和制作自平衡小车,并通过学习和实践来提高硬件和软件开发的能力。 团队成员分别拥有不同的技能和专业知识,例如电子电路设计、嵌入式系统开发、机械设计、计算机编程等。在团队中,每个成员都承担着不同的角色和职责,例如硬件工程师、软件工程师、测试人员等。




评论(0)
您还未登录,请登录后发表或查看评论