

0. 手眼标定原理
参考 flyqq 的文章:
重点:
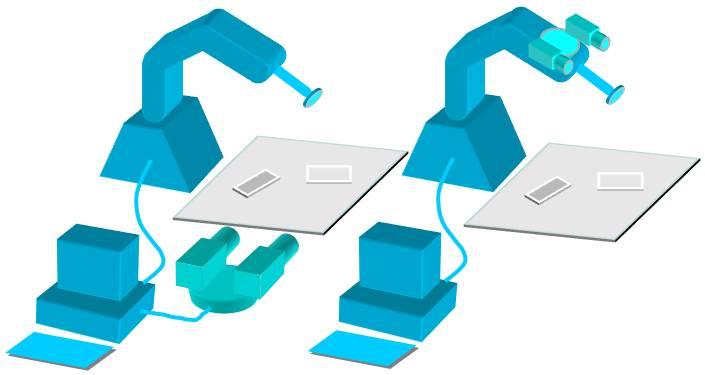
- Eye-to-hand 眼在手外:标定的是相机坐标系相对于机器人基座坐标系的位姿
- Eye-in-hand 眼在手上:标定的是相机坐标系相对于机器人工具坐标系的位姿
- 自己总结的标定原则
- 确定哪些是已知的?哪些是未知的?哪些是变化的?哪些是不变的?哪些是需要求解的?哪些是不需要求解的?
- 标定的是未知且不变的 TF(Transformation)
- 恒等式关系
- eye-to-hand:相机坐标系 <> 机器人基座坐标系(未知,不变,需要求解)
- eye-in-hand:Marker坐标系 <> 机器人基座坐标系(未知,不变,不需要求解)
1. 安装配置
- 源码编译 ur5 & ur_modern_driver
cd ~/catkin_ws/src
git clone -b kinetic-devel https://github.com/ros-industrial/universal_robot.git
cd universal_robot
git clone -b kinetic-devel https://github.com/ros-industrial/ur_modern_driver.git
cd ~/catkin_ws
catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc - realsense-ros
- aruco_ros
cd ~/catkin_ws/src
git clone -b kinetic-devel https://github.com/pal-robotics/aruco_ros.git
cd ..
catkin_make- vision_visp / visp_hand2eye_calibration
cd ~/catkin_ws/src
git clone -b kinetic-devel https://github.com/lagadic/vision_visp.git
cd ..
catkin_make --pkg visp_hand2eye_calibration- easy_handeye
cd ~/catkin_ws/src
git clone https://github.com/IFL-CAMP/easy_handeye
cd ..
catkin_make2. 眼在手外 eye-to-hand
- 2.1 修改标定 launch 文件
标定过程需启动 ur5 机械臂的相关节点,realsense 节点,aruco 节点,easy_handeye 节点,可以写一个 launch 文件同时启动上述节点,也可以分别启动。easy_handeye 包中给出了用一个 launch 文件实现的示例,在如下的目录中:xxx/easy_handeye/docs/example_launch/ur5_kinect_calibration.launch
我们可以在此基础上进行修改。
# 将 launch 文件拷贝到 easy_handeye 功能包的 launch 目录中,顺便改个名字
cd ~/catkin_ws/src/easy_handeye/docs/example_launch
cp ur5_kinect_calibration.launch ~/catkin_ws/src/easy_handeye/easy_handeye/launch/eye_to_hand_calibration.launch修改 launch 文件如下:
<launch>
<arg name="namespace_prefix" default="ur5_realsense_handeyecalibration" />
<arg name="robot_ip" doc="The IP address of the UR5 robot" />
<arg name="marker_size" doc="Size of the ArUco marker used, in meters" default="0.1" />
<arg name="marker_id" doc="The ID of the ArUco marker used" default="571"/>
<!-- 1. start the Realsense435 -->
<include file="$(find realsense2_camera)/launch/rs_camera.launch" />
<!-- 2. start ArUco -->
<node name="aruco_tracker" pkg="aruco_ros" type="single">
<remap from="/camera_info" to="/camera/color/camera_info" />
<remap from="/image" to="/camera/color/image_raw" />
<param name="image_is_rectified" value="true"/>
<param name="marker_size" value="$(arg marker_size)"/>
<param name="marker_id" value="$(arg marker_id)"/>
<param name="reference_frame" value="camera_color_frame"/>
<param name="camera_frame" value="camera_color_frame"/>
<param name="marker_frame" value="camera_marker" />
</node>
<!-- 3. start the robot -->
<include file="$(find ur_modern_driver)/launch/ur5_bringup.launch">
<arg name="limited" value="true" />
<arg name="robot_ip" value="192.168.1.102" />
</include>
<include file="$(find ur5_moveit_config)/launch/ur5_moveit_planning_execution.launch">
<arg name="limited" value="true" />
</include>
<!-- 4. start easy_handeye -->
<include file="$(find easy_handeye)/launch/calibrate.launch" >
<arg name="namespace_prefix" value="$(arg namespace_prefix)" />
<arg name="eye_on_hand" value="false" />
<arg name="tracking_base_frame" value="camera_color_frame" />
<arg name="tracking_marker_frame" value="camera_marker" />
<arg name="robot_base_frame" value="base" />
<arg name="robot_effector_frame" value="tool0_controller" />
<arg name="freehand_robot_movement" value="false" />
<arg name="robot_velocity_scaling" value="0.5" />
<arg name="robot_acceleration_scaling" value="0.2" />
</include>
</launch>(1)realsense 相机节点
<!-- 1. start the Realsense435 -->
<include file="$(find realsense2_camera)/launch/rs_camera.launch" />(2)aruco_ros 节点
从下面的网站下载 aruco 二维码并打印出来
注意:
- Dictionary 一定要选 Original ArUco
- Marker ID 和 Marker size 自选,在launch 文件中做相应的修改
- 打印时,要选择原始大小,否则要测量一下打印出来的真实大小
<!-- 2. start ArUco -->
<node name="aruco_tracker" pkg="aruco_ros" type="single">
<!-- /camera_info 和 /image 做修改 -->
<remap from="/camera_info" to="/camera/color/camera_info" />
<remap from="/image" to="/camera/color/image_raw" />
<param name="image_is_rectified" value="true"/>
<param name="marker_size" value="$(arg marker_size)"/>
<param name="marker_id" value="$(arg marker_id)"/>
<!-- reference_frame 和 amera_frame 做修改 -->
<param name="reference_frame" value="camera_color_frame"/>
<param name="camera_frame" value="camera_color_frame"/>
<param name="marker_frame" value="camera_marker" />
</node>(3)ur5 节点
注意:
- 这里用了 ur_modern_driver 包,而没有用原始的 ur_bringup 包
- 修改机器人的真实 ip
<!-- 3. start the robot -->
<include file="$(find ur_modern_driver)/launch/ur5_bringup.launch">
<arg name="limited" value="true" />
<arg name="robot_ip" value="192.168.1.102" />
</include>
<include file="$(find ur5_moveit_config)/launch/ur5_moveit_planning_execution.launch">
<arg name="limited" value="true" />
</include>(4)easy_handeye 节点
<!-- 4. start easy_handeye -->
<include file="$(find easy_handeye)/launch/calibrate.launch" >
<arg name="namespace_prefix" value="$(arg namespace_prefix)" />
<arg name="eye_on_hand" value="false" />
<arg name="tracking_base_frame" value="camera_color_frame" />
<arg name="tracking_marker_frame" value="camera_marker" />
<arg name="robot_base_frame" value="base" />
<arg name="robot_effector_frame" value="tool0_controller" />
<arg name="freehand_robot_movement" value="false" />
<arg name="robot_velocity_scaling" value="0.5" />
<arg name="robot_acceleration_scaling" value="0.2" />
</include>注意:
<arg name="eye_on_hand" value="false"/>眼在手外:value 为 false- tracking_base_frame 为相机坐标系 camera_color_frame
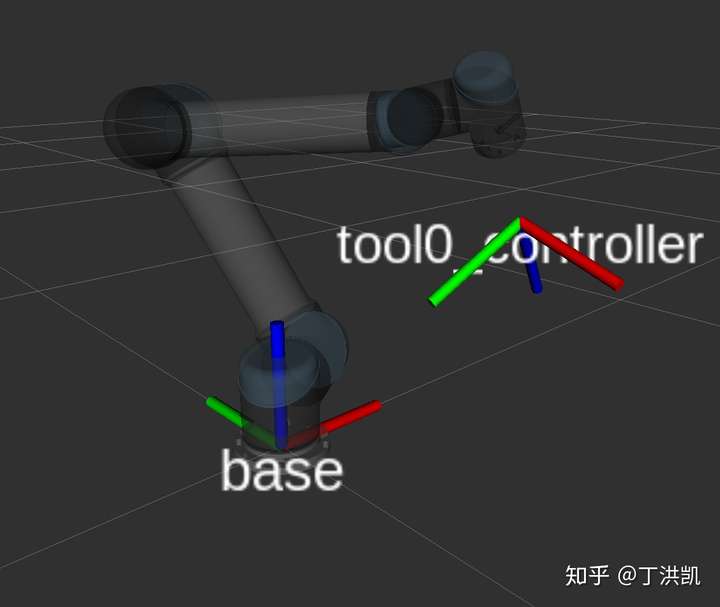
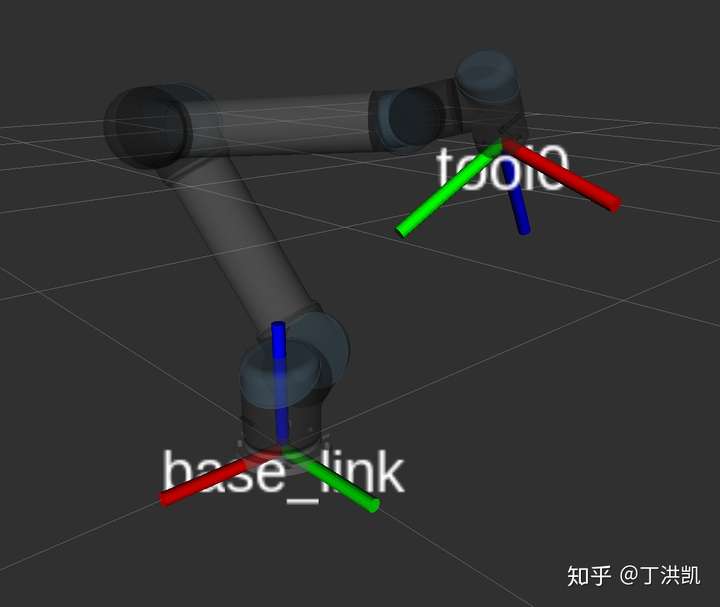
- robot_base_frame 为机器人基座坐标系,示例里写的是 base_link,我在 rviz 中查看 base 才是真实的基座坐标系
- robot_effector_frame 为工具坐标系,因为我安装了 RG2 夹具,TCP 改变了
- 2.2 启动 launch 文件,开始标定
(1)启动 launch 文件
roslaunch easy_handeye eye_to_hand_calibration.launch若报出如下错误:

解决方法:将 ur_modern_driver/launch/ur_common.launch 中的下面内容注释掉即可。
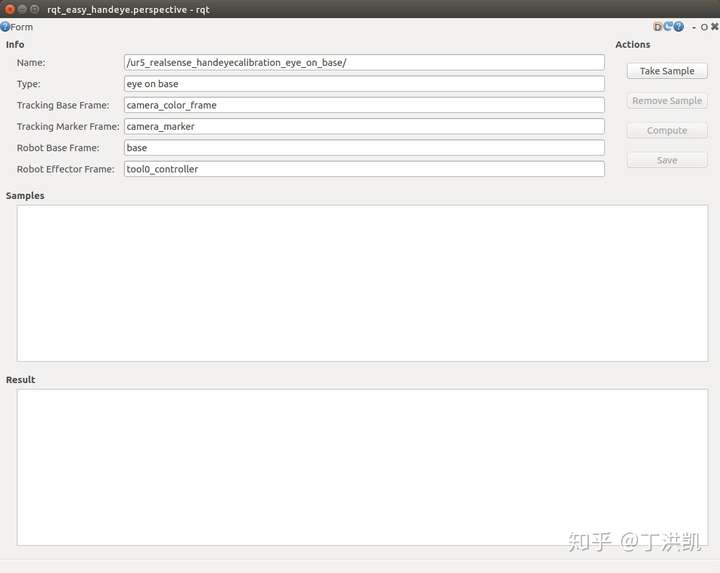
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />成功运行后,会同时打开三个界面。
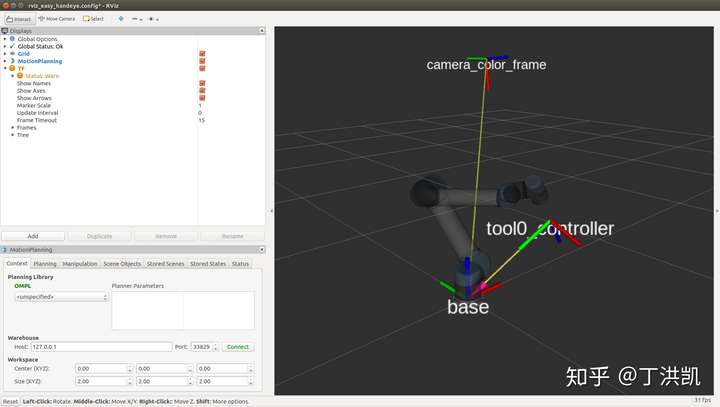
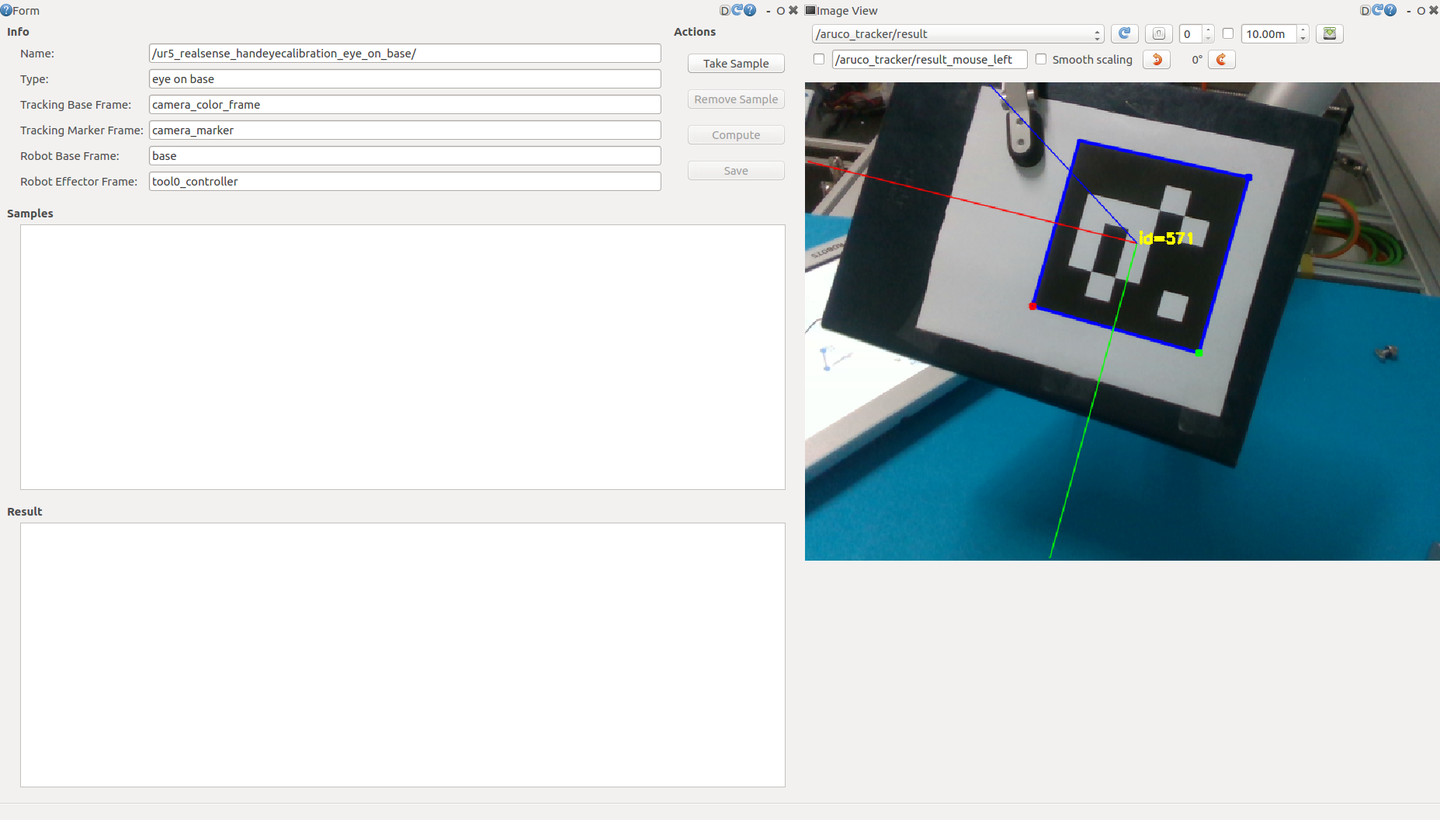
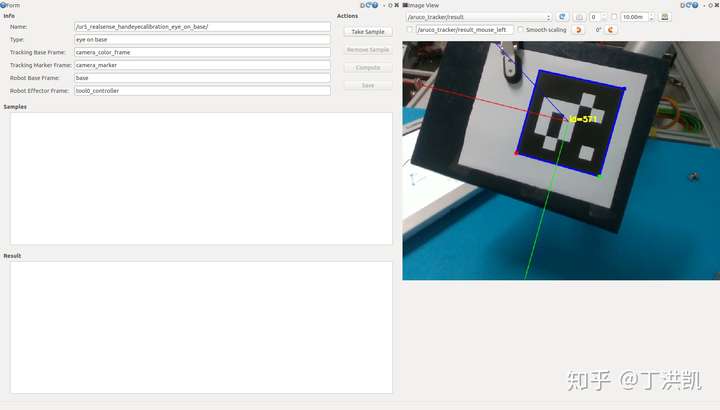
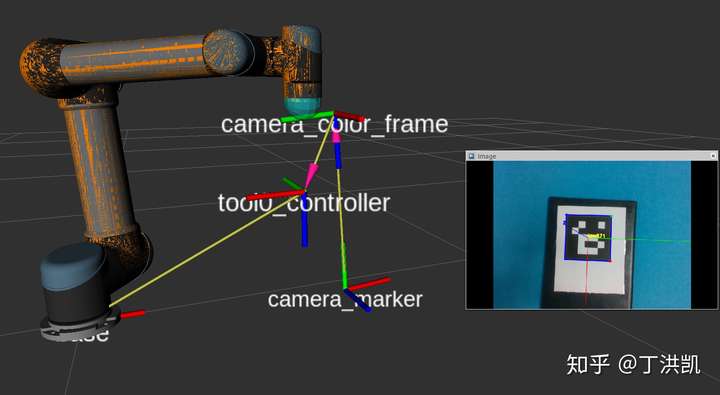
在界面 2 中,点击菜单栏的 Plugins -> Visulization -> Image View,选择 /aruco_tracker/result 话题,界面会如下所示。
(2)标定步骤
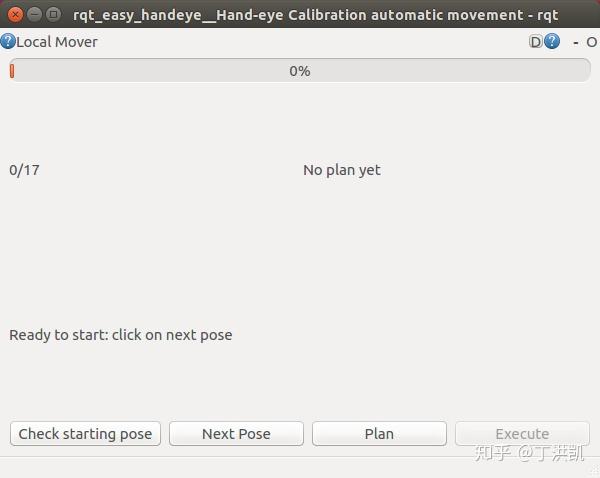
- 手动调节机械臂,使 aruco 二维码移动至相机视野中心处附近,作为 home config。在界面 3 中,点击 check starting pose,若检查成功,界面会出现: 0/17,ready to start
- 界面 3 中依次点击 Next Pose,Plan,Execute,机械臂会移动至新的位置,若二维码在相机视野范围内,且能检测成功,则进行下一步
- 界面 2 中点击 Take Sample,若 Samples 对话框中出现有效信息,说明第一个点标定成功
- 重复执行步骤 2 和步骤 3,直至 17 个点全部标定完毕
- 界面 2 中点击 Compute,则 Result 对话框中会出现结果
- 界面 2 中 Save,会将结果保存为一个 YAML 文件,路径为
~/.ros/easy_handeye

3. 眼在手上 eye-in-hand
- 方法与“眼在手外”基本相同,需要修改一下 launch 文件,注意两个 launch 文件不要重名
- 唯一修改的地方是 easy_handeye 功能包 calibrate.launch 文件中 "eye_on_hand" 参数改成 true,如下所示
<launch>
<arg name="namespace_prefix" default="ur5_realsense_handeyecalibration" />
<arg name="robot_ip" doc="The IP address of the UR5 robot" />
<arg name="marker_size" doc="Size of the ArUco marker used, in meters" default="0.1" />
<arg name="marker_id" doc="The ID of the ArUco marker used" default="571"/>
<!-- start the Realsense435 -->
<include file="$(find realsense2_camera)/launch/rs_camera.launch" />
<!-- start ArUco -->
<node name="aruco_tracker" pkg="aruco_ros" type="single">
<remap from="/camera_info" to="/camera/color/camera_info" />
<remap from="/image" to="/camera/color/image_raw" />
<param name="image_is_rectified" value="true"/>
<param name="marker_size" value="$(arg marker_size)"/>
<param name="marker_id" value="$(arg marker_id)"/>
<param name="reference_frame" value="camera_color_frame"/>
<param name="camera_frame" value="camera_color_frame"/>
<param name="marker_frame" value="camera_marker" />
</node>
<!-- start the robot -->
<include file="$(find ur_modern_driver)/launch/ur5_bringup.launch">
<arg name="limited" value="true" />
<arg name="robot_ip" value="192.168.1.102" />
</include>
<include file="$(find ur5_moveit_config)/launch/ur5_moveit_planning_execution.launch">
<arg name="limited" value="true" />
</include>
<!-- start easy_handeye -->
<include file="$(find easy_handeye)/launch/calibrate.launch" >
<arg name="namespace_prefix" value="$(arg namespace_prefix)" />
<!-- 此处改成 true -->
<arg name="eye_on_hand" value="true" />
<arg name="tracking_base_frame" value="camera_color_frame" />
<arg name="tracking_marker_frame" value="camera_marker" />
<arg name="robot_base_frame" value="base" />
<arg name="robot_effector_frame" value="tool0_controller" />
<arg name="freehand_robot_movement" value="false" />
<arg name="robot_velocity_scaling" value="0.5" />
<arg name="robot_acceleration_scaling" value="0.2" />
</include>
</launch>- 关于 Kinect Azure 相机
由于后续一直在用 Kinect Azure 相机了,现将其 launch 文件也备录一下,注意这里是 eye-to-hand。
<launch>
<arg name="namespace_prefix" default="ur5_k4a_handeyecalibration" />
<arg name="marker_size" doc="Size of the ArUco marker used, in meters" default="0.1" />
<arg name="marker_id" doc="The ID of the ArUco marker used" default="571"/>
<!-- 1. start the k4a camera -->
<include file="$(find azure_kinect_ros_driver)/launch/driver.launch">
<arg name="depth_mode" value="WFOV_2X2BINNED" />
</include>
<!-- 2. start ArUco -->
<node name="aruco_tracker" pkg="aruco_ros" type="single">
<remap from="/camera_info" to="/depth_to_rgb/camera_info" />
<remap from="/image" to="/rgb/image_raw" />
<param name="image_is_rectified" value="true"/>
<param name="marker_size" value="$(arg marker_size)"/>
<param name="marker_id" value="$(arg marker_id)"/>
<param name="reference_frame" value="rgb_camera_link"/>
<param name="camera_frame" value="rgb_camera_link"/>
<param name="marker_frame" value="camera_marker" />
</node>
<!-- 3. start the robot -->
<include file="$(find ur_modern_driver)/launch/ur5_bringup.launch">
<!--<arg name="limited" value="true" />-->
<arg name="robot_ip" value="192.168.1.102" />
</include>
<include file="$(find ur5_moveit_config)/launch/ur5_moveit_planning_execution.launch">
<arg name="limited" value="true" />
</include>
<!-- 4. start easy_handeye -->
<include file="$(find easy_handeye)/launch/calibrate.launch" >
<arg name="namespace_prefix" value="$(arg namespace_prefix)" />
<arg name="eye_on_hand" value="false" />
<arg name="tracking_base_frame" value="rgb_camera_link" />
<arg name="tracking_marker_frame" value="camera_marker" />
<arg name="robot_base_frame" value="base" />
<arg name="robot_effector_frame" value="tool0_controller" />
<arg name="freehand_robot_movement" value="false" />
<arg name="robot_velocity_scaling" value="0.5" />
<arg name="robot_acceleration_scaling" value="0.2" />
</include>
</launch>4. 发布 TF
easy_handeye 功能包提供了 publish.launch 文件,可以将标定好的 TF 发布出
- 眼在手外 eye-to-hand
注:要修改 "namespace_prefix" 参数,与眼在手外标定 launch 文件中的 "namespace_prefix" 一致,这样才能找到标定好的 YAML 文件
<?xml version="1.0"?>
<launch>
<arg name="eye_on_hand" doc="eye-on-hand instead of eye-on-base" default="false" />
<arg name="namespace_prefix" default="ur5_realsense_handeyecalibration" />
<arg if="$(arg eye_on_hand)" name="namespace" value="$(arg namespace_prefix)_eye_on_hand" />
<arg unless="$(arg eye_on_hand)" name="namespace" value="$(arg namespace_prefix)_eye_on_base" />
<!--it is possible to override the link names saved in the yaml file in case of name clashes, for example-->
<arg if="$(arg eye_on_hand)" name="robot_effector_frame" default="" />
<arg unless="$(arg eye_on_hand)" name="robot_base_frame" default="" />
<arg name="tracking_base_frame" default="" />
<arg name="inverse" default="false" />
<!--publish hand-eye calibration-->
<group ns="$(arg namespace)">
<param name="eye_on_hand" value="$(arg eye_on_hand)" />
<param unless="$(arg eye_on_hand)" name="robot_base_frame" value="$(arg robot_base_frame)" />
<param if="$(arg eye_on_hand)" name="robot_effector_frame" value="$(arg robot_effector_frame)" />
<param name="tracking_base_frame" value="$(arg tracking_base_frame)" />
<param name="inverse" value="$(arg inverse)" />
<node name="$(anon handeye_publisher)" pkg="easy_handeye" type="publish.py" output="screen"/>
</group>
</launch>- 眼在手上 eye-in-hand
注:除了要修改 "namespace_prefix" 外(同上),还要将 "eye_on_hand" 参数设为 true
<?xml version="1.0"?>
<launch>
<arg name="eye_on_hand" doc="eye-on-hand instead of eye-on-base" default="true"/>
<arg name="namespace_prefix" default="ur5_realsense_handeyecalibration" />
<arg if="$(arg eye_on_hand)" name="namespace" value="$(arg namespace_prefix)_eye_on_hand" />
<arg unless="$(arg eye_on_hand)" name="namespace" value="$(arg namespace_prefix)_eye_on_base" />
<!--it is possible to override the link names saved in the yaml file in case of name clashes, for example-->
<arg if="$(arg eye_on_hand)" name="robot_effector_frame" default="" />
<arg unless="$(arg eye_on_hand)" name="robot_base_frame" default="" />
<arg name="tracking_base_frame" default="" />
<arg name="inverse" default="false" />
<!--publish hand-eye calibration-->
<group ns="$(arg namespace)">
<param name="eye_on_hand" value="$(arg eye_on_hand)" />
<param unless="$(arg eye_on_hand)" name="robot_base_frame" value="$(arg robot_base_frame)" />
<param if="$(arg eye_on_hand)" name="robot_effector_frame" value="$(arg robot_effector_frame)" />
<param name="tracking_base_frame" value="$(arg tracking_base_frame)" />
<param name="inverse" value="$(arg inverse)" />
<node name="$(anon handeye_publisher)" pkg="easy_handeye" type="publish.py" output="screen"/>
</group>
</launch>- 测试
# 开启 publish.luanch 文件,以眼在手上为例
roslaunch easy_handeye publish.launch
# 查看 TF(改成自己的工具坐标系与相机坐标系)
rosrun tf tf_echo /tool0_controller /camera_color_frame
注意:这里四元数的顺序是 [qx, qy, qz, qw]
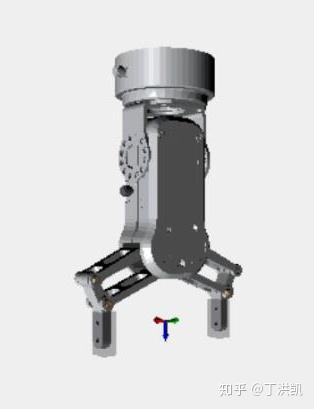
RG2 夹具实际安装构型如上图所示,红绿蓝(RGB)对应 坐标轴 XYZ(TCP 工具坐标系),坐标轴符合右手定则。X 轴(红色箭头)垂直于两个 tip 的连线,Y 轴(绿色箭头)指向图中右侧的 tip,Z 轴指向图中下方。

相机实际的安装位置如上图所示。
综合夹具的安装位置以及标定参数的 Translation 值 和 Rotation 欧拉角值,判断标定基本正确,具体的标定精度,后面再测试。




评论(0)
您还未登录,请登录后发表或查看评论