

引言
在前面的章节中,我们讲解了柔顺控制原理,python微分运动求解,为后面求解位置导纳控制打下基础。今天我们来讲解下如何使用python在pybullet仿真环境中实现姿态导纳控制。
环境设置
在位置导纳控制那一章中,我们使用盆作为墙面,来测试轴碰撞前面后的导纳控制效果。在实际的控制中,我们首先在reset中,使用设置的M,B,K参数获得需要的微分方程,进而求得带外力符号的特解(自变量设置为固定值0.005,这是pybullet一步的时间),然后在主程序循环中,赋值当前受力和当前位置,输出期望的位置,其中姿态设置为定值。
在位置导纳控制那一节中,我们设置盆作为墙面,进行位置导纳控制。在这一节,我们仍然使用哪个墙面进行实验,只不过这次我们需要实现的是:撞墙之后可以实现姿态调整进行实现柔顺。

代码逻辑分析
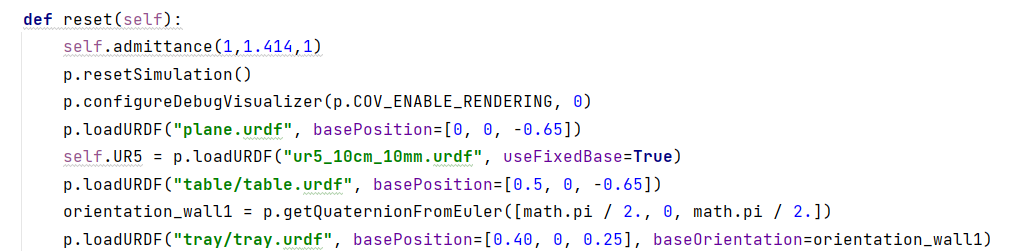
1、首先,我们需要在reset中实现初始化位姿的设置,以及导纳模型的搭建以及解的求取:
2、然后我们回到主函数中,在主函数中,我们需要实现当前状态获取以及计算期望位姿:

3、首先,我们看更新当前状态的函数:

在这个函数中,我们首先实现了当前位姿的更新。在得到当前位姿的同时,我们还需要获取工具坐标系中所受力矩。由于需要对工具坐标系力矩转移到机器人末端连杆坐标系,我们需要将力矩保存格式转为ndarray。在得到机器人末端连杆坐标系的距离之后,为了能够使力矩数据格式适配计算所需转动轴角(姿态)的函数。需要将其转为list格式,并进行降维。
4、执行完更新当前状态的函数之后,就可以利用所获得的数据进行控制。
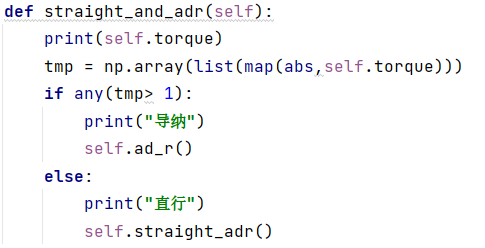
在这里,我们有两个控制函数,分别是仅直行的控制函数,一个是仅姿态导纳控制的控制函数,两者之间通过力矩阈值进行切换。
在仅直行控制函数中:
def update_control_p_with_adr(self):
self.position_need = get_position_p(self.posture, self.position,2)
self.posture_need = p.getQuaternionFromEuler([-math.pi / 2., 0, -math.pi / 2.])
#在这里设置可以保证导纳控制时位置不变,因为导纳控制时位置已经fixed
self.fixed_position = self.position_need期望位置同之前章节中介绍直行一样,我们沿着z轴,每次运动0.0002m;期望姿态每次保持固定不变。这里需要注意的是:这里我们设置一个单独的变量self.fixed_position,用于在导纳控制中位置量self.position_need的赋值。
在导纳控制的函数中:
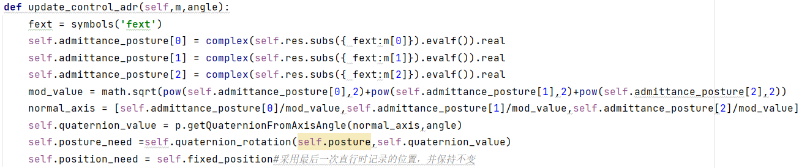
在这个控制函数中,同样的需要为期望位置和期望姿态赋值。期望位置赋值就是刚才在直行中设置的量。因为我们总是需要先进行位置控制,这可以保证self.fixed_position的值是有意义的。在姿态控制时,我们首先得到导纳控制的解,然后归一化得到轴角形式的值,最后最后转为四元数,得到期望姿态。最终的结果分析部分见下文。
May the force be with you!


评论(3)
您还未登录,请登录后发表或查看评论