

0. 前言
对于很多传感器,网上基于 ROS1 的功能包比较多,对于 ROS2 的适配目前很少,但 ROS2 在稳定性、实时性方面具有更大的优势,可以投入实际的工业应用中。
这篇播客介绍了海康相机的 ROS2 功能包,是我在 ROS1 功能包 的基础上进行修改,最后在 Ubuntu20.04 ROS2 Foxy 下测试通过,大家可以直接克隆下来使用。
仓库链接:SEUZTh/hk_camera: Hikvision Camera ROS2 package (github.com)
1. 安装官方 MVS 客户端
- 下载链接: 机器视觉工业相机客户端
- 选择下面这个进行下载:

- 根据自己使用的计算机平台,选择对应的
tar.gz软件包:

- 解压并执行安装:
# 随便一个地方解压缩
sudo ./setup.sh # 将会安装在 /opt/MVS/ 下
- 在
/etc/ld.so.conf.d文件中新建文件mvs.conf:
sudo vi mvs.conf
- 文件中添加如下内容(根据自己电脑的平台选择,我这里是 x64 ,所以选择这个):
/opt/vc/lib
/opt/MVS/lib/64
- 在终端执行:
sudo ldconfig
- 重启电脑以生效。
2. 海康相机 ROS2 功能包
- 创建工作空间:
mkdir -p ~/ws_hk_camera/src
cd ~/ws_hikrobot_camera/src
- 克隆功能包:
git clone https://github.com/SEUZTh/hk_camera.git
- 编译执行:
colcon build
source install/setup.sh
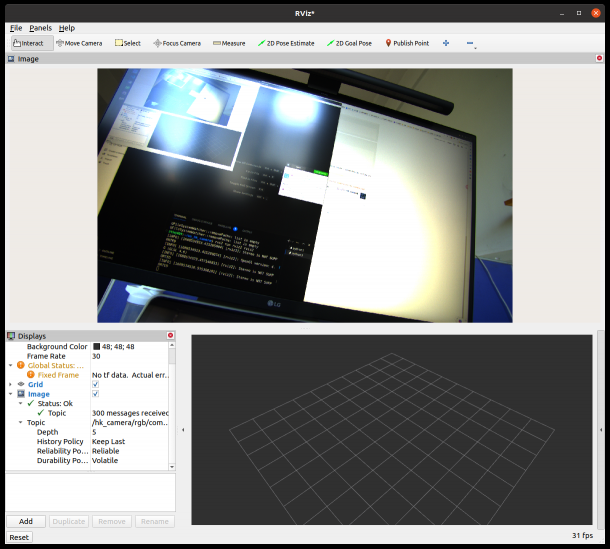
ros2 run hk_camera hk_camera
ros2 run rviz2 rviz2
- 效果如下:
3. 解析
这里记录一下我是如何将 ROS1 功能包修改为 ROS2 功能包的。
- 查看 ROS1 功能包中依赖的包,在 ROS2 工作空间下创建对应的功能包:
ros2 pkg create hk_camera --build-type ament_cmake --dependencies rclcpp std_msgs cv_bridge image_transport
- 如果不确定在 ROS2 中对应于 ROS1 的依赖是什么,可以使用命令进行查看:
rospack list
ros2 pkg list # ROS2
- 下面是一个将 ROS1 依赖包映射到 ROS2 依赖包的简单对应表格:
| ROS 1依赖包 | ROS 2对应依赖包 |
|---|---|
| actionlib | action_msgs |
| actionlib_msgs | action_msgs |
| actionlib_tutorials | action_tutorials_interfaces |
| angles | angles |
| bond | - |
| bondcpp | - |
| bondpy | - |
| camera_calibration | camera_calibration |
| camera_calibration_parsers | camera_calibration_parsers |
| camera_info_manager | camera_info_manager |
| catkin | ament_cmake |
| class_loader | class_loader |
| cmake_modules | cmake_modules |
| compressed_depth_image_transport | compressed_depth_image_transport |
| compressed_image_transport | compressed_image_transport |
| control_msgs | control_msgs |
| control_toolbox | - |
| controller_interface | - |
| controller_manager | - |
| controller_manager_msgs | - |
| cpp_common | cpp_common |
| cv_bridge | cv_bridge |
| depth_image_proc | - |
| diagnostic_aggregator | - |
| diagnostic_analysis | - |
| diagnostic_common_diagnostics | diagnostic_msgs |
| diagnostic_msgs | diagnostic_msgs |
| diagnostic_updater | diagnostic_updater |
| diff_drive_controller | - |
| dynamic_reconfigure | rclcpp |
| eigen_conversions | tf2_eigen |
| filters | - |
| forward_command_controller | - |
| gazebo_dev | - |
| gazebo_msgs | - |
| gazebo_plugins | - |
| gazebo_ros | - |
| gazebo_ros_control | - |
| gencpp | - |
| geneus | - |
| genlisp | - |
| genmsg | - |
| gennodejs | - |
| genpy | - |
| geographic_msgs | geographic_msgs |
| geometry_msgs | geometry_msgs |
| gl_dependency | - |
| hardware_interface | - |
| image_geometry | image_geometry |
| image_proc | - |
| image_publisher | - |
| image_rotate | - |
| image_transport | image_transport |
| image_view | - |
| interactive_marker_tutorials | - |
| interactive_markers | interactive_markers |
| joint_limits_interface | - |
| joint_state_controller | - |
| joint_state_publisher | - |
| joint_state_publisher_gui | - |
| joy | joy |
| kdl_conversions | tf2_kdl |
| kdl_parser | kdl_parser |
| laser_assembler | - |
| laser_filters | - |
| laser_geometry | laser_geometry |
| librviz_tutorial | - |
| map_msgs | map_msgs |
| media_export | - |
| message_filters | message_filters |
| message_generation | message_generation |
| message_runtime | message_runtime |
| mk | - |
| nav_msgs | nav_msgs |
| nodelet | - |
| nodelet_topic_tools | - |
| nodelet_tutorial_math | - |
| pcl_conversions | pcl_conversions |
| pcl_msgs | pcl_msgs |
| pcl_ros | - |
| pluginlib | pluginlib |
| pluginlib_tutorials | - |
| polled_camera | - |
| position_controllers | - |
| python_qt_binding | python_qt_binding |
| qt_dotgraph | qt_dotgraph |
| qt_gui | qt_gui |
| qt_gui_cpp | qt_gui_cpp |
| qt_gui_py_common | qt_gui_py_common |
| qwt_dependency | - |
| realtime_tools | realtime_tools |
| resource_retriever | resource_retriever |
| robot_state_publisher | robot_state_publisher |
| ros_environment | ros_environment |
| rosbag | rosbag2 |
| rosbag_migration_rule | - |
| rosbag_storage | rosbag2_storage |
| rosbash | - |
| rosboost_cfg | - |
| rosbuild | - |
| rosclean | - |
| rosconsole | rclcpp_logging |
| rosconsole_bridge | ros_bridge |
| roscpp | rclcpp |
| roscpp_serialization | rclcpp_serialization |
| roscpp_traits | rclcpp_traits |
| roscpp_tutorials | rclcpp_tutorials |
| roscreate | - |
| rosgraph | rosgraph |
| rosgraph_msgs | rosgraph_msgs |
| roslang | - |
| roslaunch | launch |
| roslib | - |
| roslint | - |
| roslisp | - |
| roslz4 | - |
| rosmake | - |
| rosmaster | ros2service |
| rosmsg | - |
| rosnode | ros2node |
| rosout | rcl_logging_spdlog |
| rospack | ros2pkg |
| rosparam | ros2param |
| rospy | rclpy |
| rospy_tutorials | rclpy_tutorials |
| rosservice | ros2service |
| rostest | launch_testing |
| rostime | rclcpp |
| rostopic | ros2topic |
| rosunit | launch_testing |
| roswtf | ros2doctor |
| rqt_action | rqt_action |
| rqt_bag | ros2bag |
| rqt_bag_plugins | - |
| rqt_console | rqt_console |
| rqt_dep | - |
| rqt_graph | rqt_graph |
| rqt_gui | qt_gui |
| rqt_gui_cpp | qt_gui_cpp |
| rqt_gui_py | qt_gui_py |
| rqt_image_view | rqt_image_view |
| rqt_launch | launch |
| rqt_logger_level | rqt_logger_level |
| rqt_moveit | - |
| rqt_msg | - |
| rqt_nav_view | - |
| rqt_plot | rqt_plot |
| rqt_pose_view | - |
| rqt_publisher | rqt_publisher |
| rqt_py_common | rqt_py_common |
| rqt_py_console | rqt_py_console |
| rqt_reconfigure | rqt_reconfigure |
| rqt_robot_dashboard | - |
| rqt_robot_monitor | - |
| rqt_robot_steering | - |
| rqt_runtime_monitor | - |
| rqt_rviz | - |
| rqt_service_caller | - |
| rqt_shell | rqt_shell |
| rqt_srv | - |
| rqt_tf_tree | - |
| rqt_top | - |
| rqt_topic | rqt_topic |
| rqt_web | - |
| rviz | rviz2 |
| rviz_plugin_tutorials | - |
| rviz_python_tutorial | - |
| self_test | - |
| sensor_msgs | sensor_msgs |
| shape_msgs | shape_msgs |
| smach | - |
| smach_msgs | - |
| smach_ros | - |
| smclib | - |
| stage | - |
| stage_ros | - |
| std_msgs | std_msgs |
| std_srvs | std_srvs |
| stereo_image_proc | - |
| stereo_msgs | stereo_msgs |
| tf | tf2 |
| tf2 | tf2 |
| tf2_eigen | tf2_eigen |
| tf2_geometry_msgs | tf2_geometry_msgs |
| tf2_kdl | tf2_kdl |
| tf2_msgs | tf2_msgs |
| tf2_py | tf2_py |
| tf2_ros | tf2_ros |
| tf_conversions | tf2 |
| theora_image_transport | - |
| topic_tools | topic_tools |
| trajectory_msgs | trajectory_msgs |
| transmission_interface | - |
| turtle_actionlib | ros2action |
| turtle_tf | turtle_tf |
| turtle_tf2 | turtle_tf2 |
| turtlesim | turtlesim |
| urdf | urdfdom |
| urdf_parser_plugin | urdfdom_py |
| urdf_sim_tutorial | - |
| urdf_tutorial | urdfdom_tutorial |
| uuid_msgs | unique_identifier_msgs |
| velodyne_driver | - |
| velodyne_laserscan | - |
| velodyne_msgs | - |
| velodyne_pointcloud | - |
| visualization_marker_tutorials | - |
| visualization_msgs | visualization_msgs |
| webkit_dependency | - |
| xacro | xacro |
| xmlrpcpp | - |
需要注意的是,上面只是给出了一种简单的对应,某些 ROS1 依赖包可能没有直接对应的 ROS2 依赖包,或者对应的包名称可能不完全相同。此外,对于某些特定功能或工具,ROS2 可能使用了不同的包结构或更改了依赖关系。因此,在迁移 ROS1 代码到 ROS2 时,可能需要进行进一步的调整和修改。
-
然后就是修改
CMakeLists.txt,编写src/hk_camera/include/hk_camera.hpp和src/hk_camera/src/hk_camera.cpp,其中的一些函数和消息类型需要从 ROS1 映射到 ROS2 中,下面是一些需要注意的点。 -
ROS1 中
cv_bridge::CvImagePtr是boost::make_shared,这种类型显然比std::make_shared更高效,但ROS2中没有使用这种更高效的数据结构, 这两个变量类型在 ROS 头文件中可以查看,算是一个小细节。
cv_bridge::CvImagePtr cv_ptr = boost::make_shared<cv_bridge::CvImage>(); // ROS1
cv_bridge::CvImagePtr cv_ptr = std::make_shared<cv_bridge::CvImage>(); // ROS2
- ROS1 中发布相机消息,会产生多个话题,包括压缩图像的话题等等,但 ROS2 为了更高效,并不会自动产生这些话题,只能在代码中指定发布哪些相机话题:
xxx@xxx:~$ ros2 topic list
/clicked_point
/goal_pose
/hk_camera/rgb/camera_info
/hk_camera/rgb/compressed
/initialpose
/parameter_events
/rosout
/tf
/tf_static
xxx@xxx:~/ws_hikrobot_camera$ rostopic list
/hikrobot_camera/camera_info
/hikrobot_camera/rgb
/hikrobot_camera/rgb/compressed
/hikrobot_camera/rgb/compressed/parameter_descriptions
/hikrobot_camera/rgb/compressed/parameter_updates
/hikrobot_camera/rgb/compressedDepth
/hikrobot_camera/rgb/compressedDepth/parameter_descriptions
/hikrobot_camera/rgb/compressedDepth/parameter_updates
/hikrobot_camera/rgb/theora
/hikrobot_camera/rgb/theora/parameter_descriptions
/hikrobot_camera/rgb/theora/parameter_updates
/rosout
/rosout_agg

评论(2)
您还未登录,请登录后发表或查看评论