

力控机器人原理及力控制实现
力控机器人是一种能够感知力量并具有实时控制能力的机器人系统。它们可以在与人类进行精准协作和合作时,将力传感技术(Force Sensing Technology)和控制算法(Control Algorithm)结合起来,实现高度灵活和精确的操作。
这些机器人通常被用于各种高要求的工作场景中,如精密装配、半导体制造、医疗手术等。通过力控技术,机器人可以感知到施加在物体上的力量,并根据预设的参数值进行自动调整,以避免对物体造成损害。此外,力控机器人还可以在操作过程中根据需要实时改变力量,以适应不同的任务需求。
力控机器人的工作原理包括三个主要部分:感知、控制和执行。首先,机器人通过内置的力传感器感知到施加在物体上的力量。接下来,控制算法会根据感知到的力量值和其他相关信息,计算出机器人应该如何调整其操作以达到预设的目标。最后,机器人的执行器会根据计算结果,实时调整机器人的动作和力量,以确保操作的精确性和安全性。

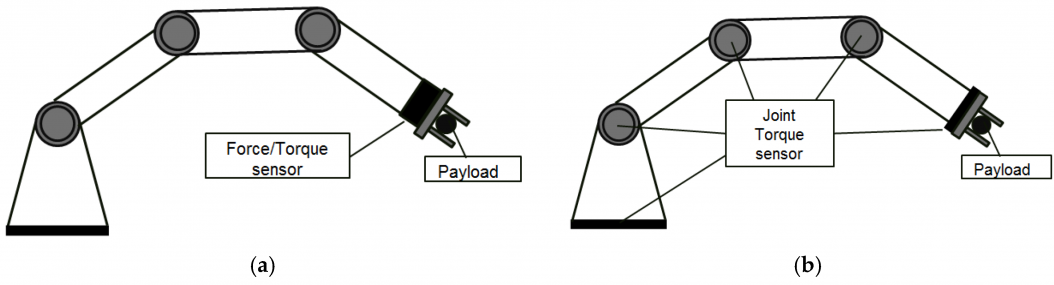
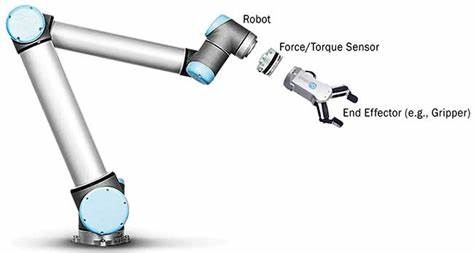
力/力矩传感器在力控方式中扮演着非常重要的角色,因为它们能够提供实时的力反馈,让人形机器人能够精确地控制其操作。
这些传感器通常被放置在机器人和外部环境之间,以便测量机器人施加在外部环境上的力量。这些信息对于实现精确和安全的操作至关重要,因为它们可以帮助机器人根据实际需要实时调整其力量和动作。
通过将力/力矩传感器与机器人的控制系统相结合,可以实现对机器人操作的精确控制。这将使机器人能够更好地适应不同的任务需求,提高其灵活性和适应性。

机器人感知层的确是通过各种感知技术,如力觉、触觉、视觉等,来获取和理解外部环境和状态的信息,从而为人机交互和柔性作业提供决策依据。这些感知方式对于机器人的自主操作和智能化发展都至关重要。
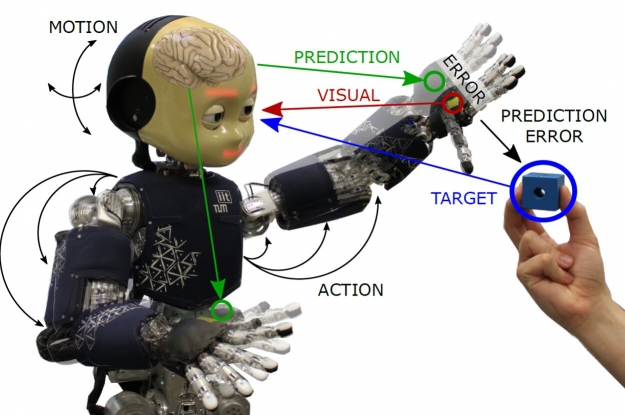
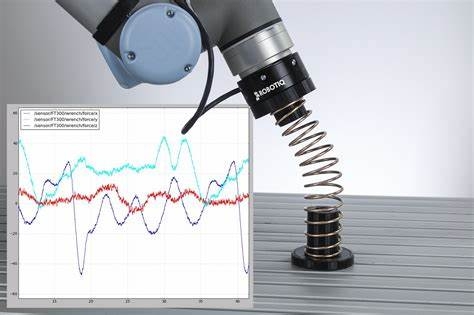
其中,力触觉感知系统在机器人操作中具有非常重要的作用。它可以检测机器人末端执行器与工件相互作用时产生的三维力/力矩和接触信息。这些信息对于机器人来说是极其重要的,它们可以提供关于环境、操作和自身状态的详细信息,帮助机器人做出更精确和安全的操作。
具体来说,力触觉感知系统的工作原理如下:首先,安装在机器人末端执行器上的力/力矩传感器会实时检测到与工件的相互作用力。这些力信号将被转换为电信号,然后通过数据传输到机器人的控制系统。在控制系统内,这些电信号会被进一步处理和分析,以生成有关机器人操作的各种信息。这些信息可以包括工件的形状、大小、硬度等,以及机器人末端执行器的姿态、位置等。这些信息对于机器人来说是极其重要的,它们可以帮助机器人更好地适应环境,做出更精确的操作。
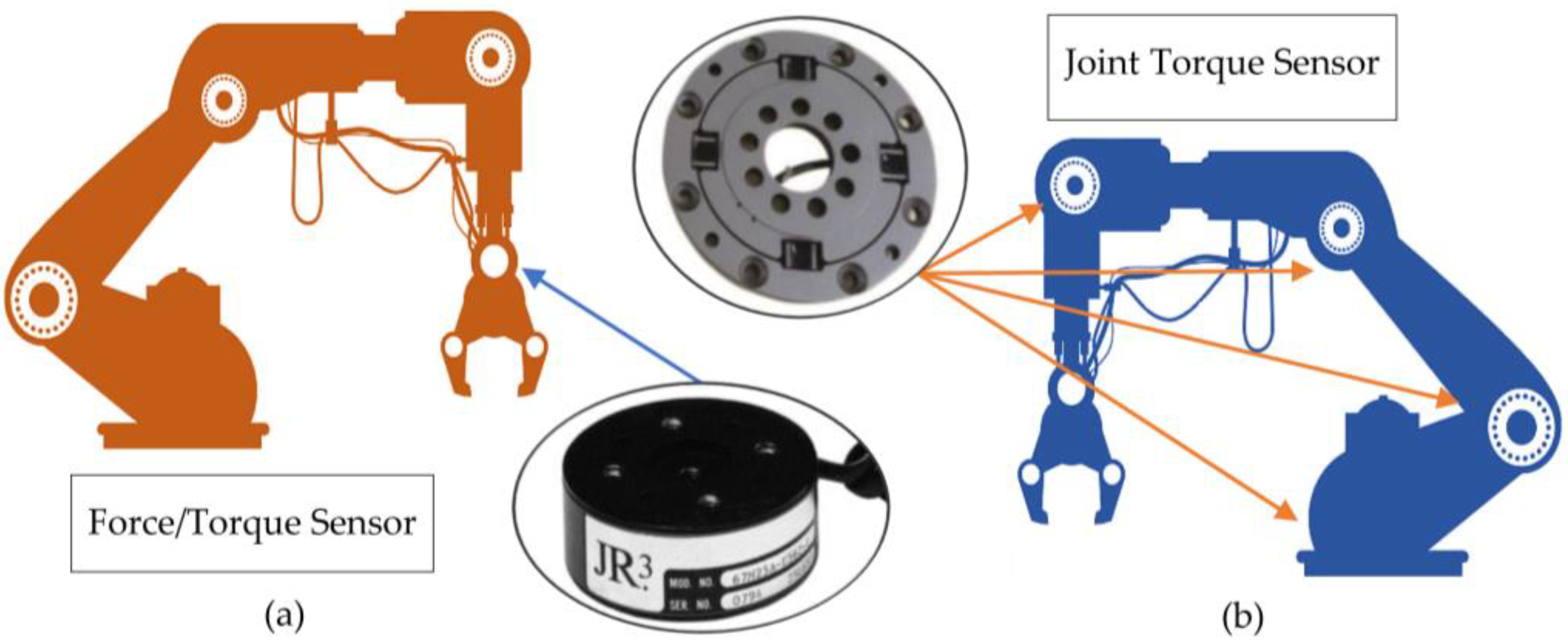
关节扭矩传感器的基本原理是应变测量。当机器人关节运动时,扭矩传感器会感受到由机器人关节施加在传感器上的力矩,这会导致传感器发生微小的形变。扭矩传感器通过测量这种形变来确定扭矩的大小。
在机器人关节中,扭矩的传递通过齿轮、轴承和其他传动部件实现。传感器通常被安装在这些传动部件中的一个上,以便测量扭矩。其中一种常见的传感器类型是应变片传感器。
机器人关节力控制系统主要通过对机器人的每个关节进行控制,实现机器人的运动控制、定位以及精确度的保持。一般来说,机器人关节力控制系统主要由伺服驱动器、编码器、控制器等组成。

搭建机器人关节力控制系统需要以下步骤:
- 选择合适的电机和传感器。电机的选取要符合机器人的要求,例如扭矩和速度范围。传感器的选择则取决于需要监测的参数,如位置、速度和力量。
- 编写适当的控制算法。一个常用的算法是PID控制算法。PID控制算法基于误差信号,它通过比较实际位置和期望位置之间的差异来调整电机的输出。这个差异作为反馈信号用于控制系统的调整。
- 利用动力学模型描述机器人腿部的运动学和动力学特性。基于动力学模型,可以分析机器人腿部运动的稳定性和平衡性,进而根据需要进行控制参数的调整。
- 选择合适的控制系统硬件,例如单片机、PC机、工控机等,以及与硬件相匹配的操作系统和编译环境。
- 设计和实现控制系统通信,例如选择合适的通信协议和通信方式,以确保各部件间的信息传输的准确性和实时性。
UR机器人与外部环境接触时,安装在机器人末端执行器上的力觉传感器会检测到机器人施加在外部环境上的力。这些力信号会被转化为电信号,然后传输到机器人的控制系统。在控制系统中,这些电信号会被进一步处理并用于计算机器人的位置、速度和加速度等运动参数。
根据机器人的运动参数和操作要求,控制系统会计算出必要的力量和运动,以实现精确的操作。这种力控原理的实现方式可以提高机器人在操作过程中的稳定性和安全性,同时减少对外部环境的损害。
URe系列机器人是一种能够实现自主作业的机器人,其中末端力控是其重要的技术之一。
末端力控是指控制机器人末端执行器的力量,使其能够适应不同的操作需求,同时避免对外部环境造成损害。URe系列机器人的末端力控是通过力觉传感器来实现的。
首先,安装在机器人末端执行器上的力觉传感器会检测到机器人施加在外部环境上的力,并将这些力信号转化为电信号传输到机器人的控制系统。在控制系统中,这些电信号会被进一步处理并用于计算机器人的位置、速度和加速度等运动参数。
其次,根据机器人的运动参数和操作要求,控制系统会计算出必要的力量和运动,以实现精确的操作。这种力控原理的实现方式可以提高机器人在操作过程中的稳定性和安全性,同时减少对外部环境的损害。
此外,URe系列机器人在进行力控时还可以采用其他技术,如导纳控制、阻抗控制等。这些技术可以帮助机器人更好地适应不同的操作环境,提高其操作能力和适应性。
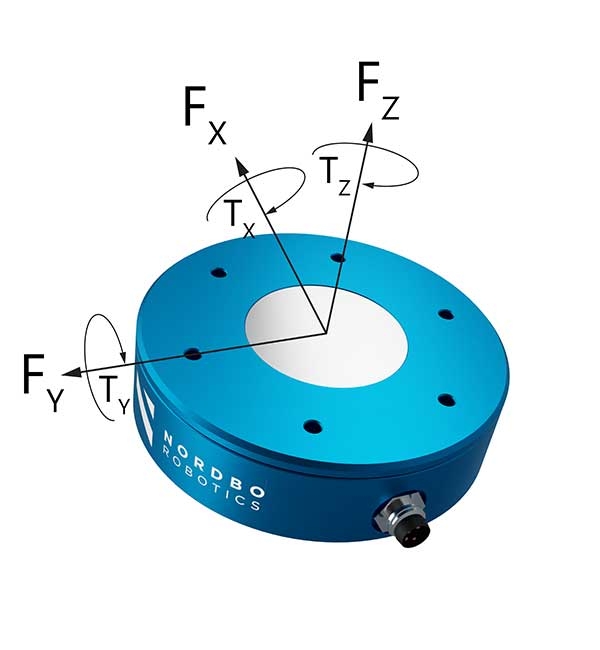
六维力传感器是机器人力控解决方案中应用最广泛的传感器之一,其性能更好,成本也相对较高。通过使用六维力传感器,URe系列机器人可以更好地感知其操作环境,从而进行更精确的操作,提高生产效率和质量。
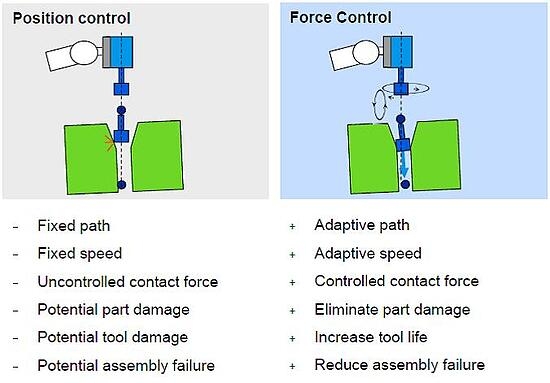
机器人位置控制和力控制的主要区别在于它们各自的主要控制目标和应用场景。
位置控制主要关注的是机器人末端执行器的位置和姿态。在位置控制模式下,机器人会严格按照预先设定的位置轨迹进行运动。这种控制方式主要用于那些对精度和稳定性要求较高的任务,例如焊接、装配等。在位置控制中,如果机器人遇到阻碍,如遇到墙壁或其他物体,机器人的力量控制会启动,以避免对机器人和环境造成损害。
力控制的主要目标是控制机器人与环境之间的作用力。在力控制模式下,当机器人遇到阻碍时,它会智能地调整预设位置轨迹,从而消除内力。这种方法更注重的是机器人与环境之间的交互,而不仅仅是机器人的运动轨迹。
位置控制和力控制在以下方面存在差异:
-
控制目标:位置控制的目标是使机器人的末端执行器达到预设的位置和姿态,而力控制的目标是使机器人与环境之间的作用力在可接受的范围内。
-
应用场景:位置控制适用于对精度和稳定性要求较高的任务,如焊接、装配等。力控制则更适用于人机协作、康复训练和柔顺生产等领域。
-
安全性:在位置控制中,如果机器人遇到阻碍,机器人的力量控制会启动,以避免对机器人和环境造成损害。而在力控制中,机器人会智能地调整预设位置轨迹,从而消除内力,安全性更高。
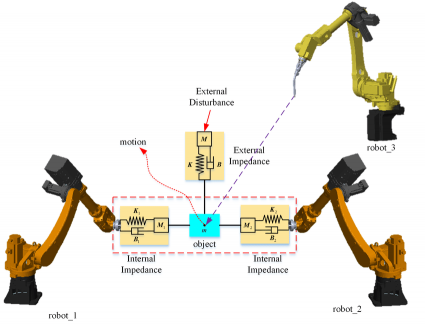
在工业机器人中,阻抗控制是一种非常重要的控制方法,主要用于控制机器人的力和位。通过调整阻抗,机器人可以更好地适应不同的操作环境和任务需求。
阻抗控制的基本思路是:建立一个期望的机器人位置和接触力的动态响应关系,通过改变阻抗,可以调节机器人与外界的动态作用。
一般来说,机器人阻抗控制主要分为两种方法:基于位置的阻抗控制和基于力的阻抗控制。
- 基于位置的阻抗控制:让机器人电机在位置模式下工作,通过发送目标位置和速度实现阻抗特性。这种控制方式主要是为了控制机器人的位置精度和运动轨迹。
- 基于力的阻抗控制:需要让机器人的电机处于力矩模式工作,需要考虑机器人的动力学模型,直接计算出需要的力矩给驱动器。这种控制方式主要是为了控制机器人与环境之间的作用力和反作用力,从而实现更好的顺应性。
在基于力的阻抗控制中,需要使用到机器人力传感器来测量机器人与环境之间的作用力。通过这种方式,机器人可以更好地感知其操作环境,并根据实际需要对力和位置进行更为精准的控制。
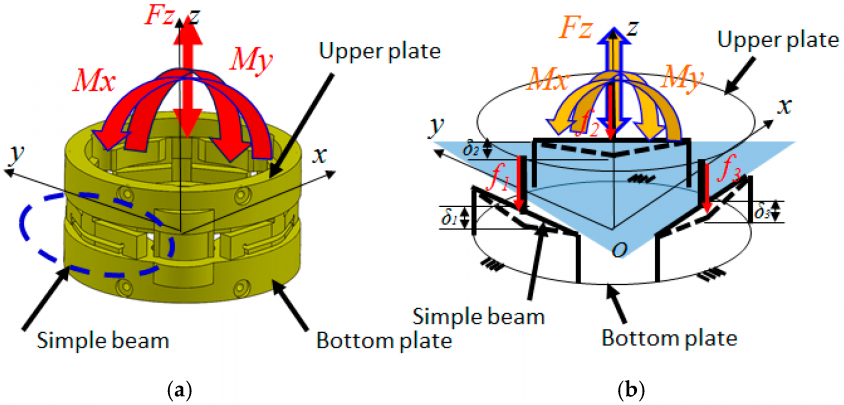
力觉传感器在机器人的主动柔顺控制中起着至关重要的作用,它们是实现机器人力控制性能必不可少的部件。六维力传感器是目前在机器人力控解决方案中应用最为广泛的力觉传感器。
六维力传感器能够同时提供更全面的力信息。这些信息对于实现机器人的精确操作和适应各种不同的任务场景至关重要。

相比之下,电流环在响应精度和速度上均低于力传感器,因此其适用场景相对有限。尽管电流环的成本可能较低,但在需要更高精度和更快响应速度的应用中,力传感器通常是更好的选择。
参考文献:
【1】Multi-Axis Force/Torque Sensor Based on Simply-Supported Beam and Optoelectronics


评论(0)
您还未登录,请登录后发表或查看评论