














2199人查看
0条评论



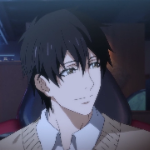
基于 QT5 的 ROS2 GUI 开发教程

16届智能车竞赛创意组
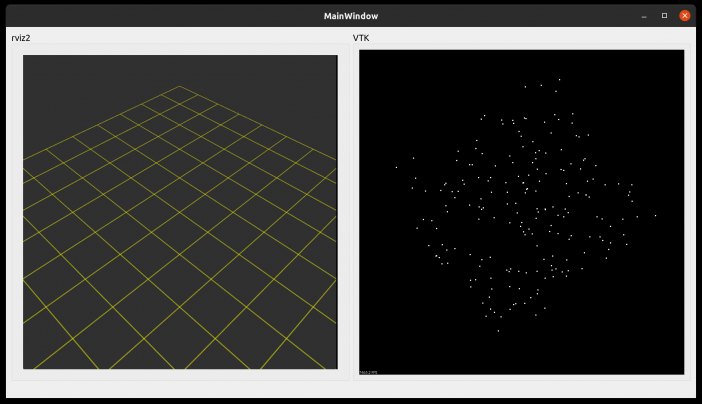
OriginBot开发之旅
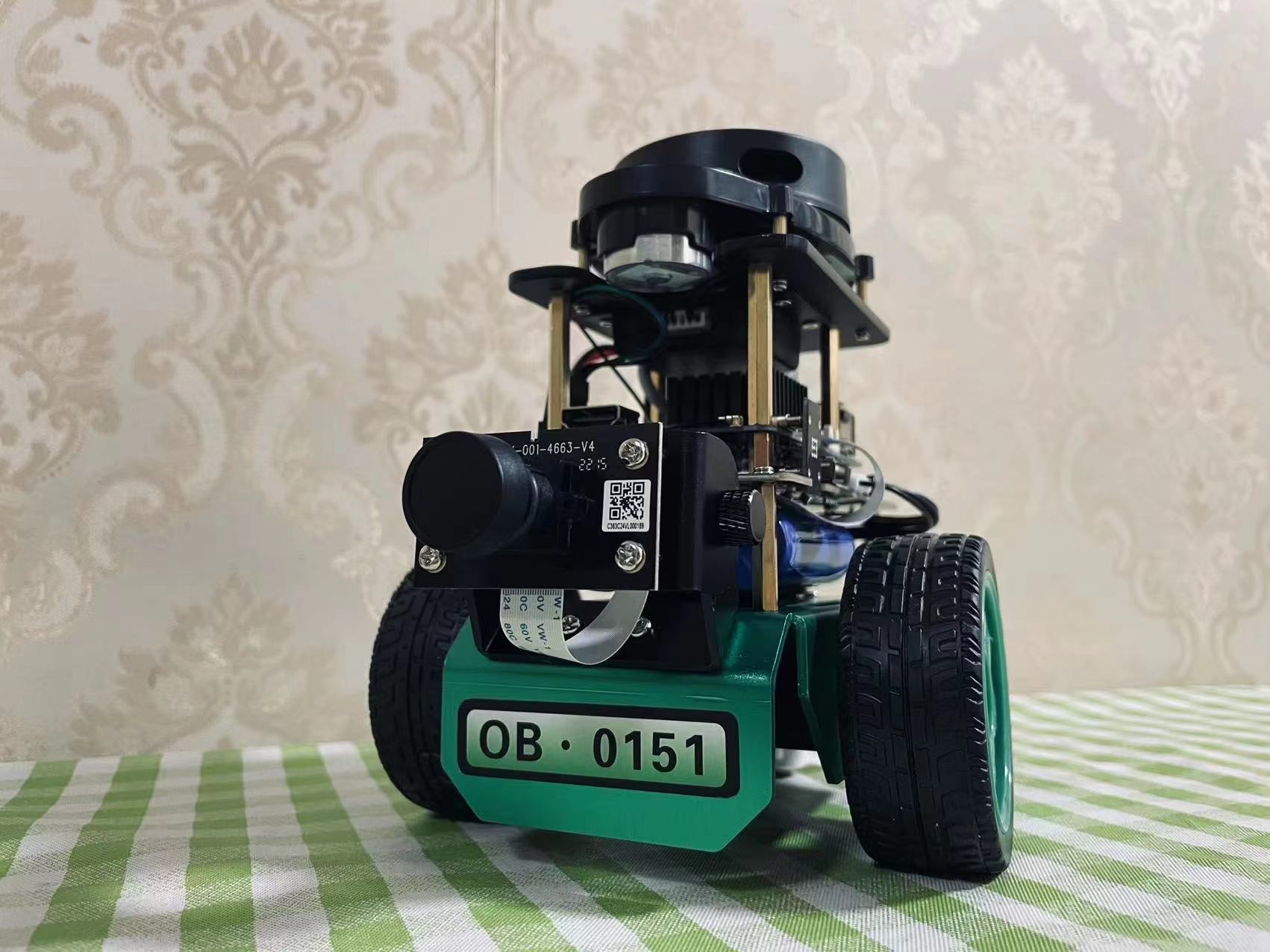
PID与电机

STM32基础学习
拒绝光照影响,一文教你在地平线旭日派X3上如何使用resnet18搭建自己的深度学习巡线小车
11 分钟前一阶LADRC笔记&代码实现
27 分钟前机器人导航(仿真)(一)——SLAM建图
40 分钟前RDK X3算力确实强!!!
1 小时前docker与宿主机数据交换—ROS2
2 小时前树莓派4B配置ubuntu18.04.5
19 小时前物联网外设学习笔记-蓝牙模块
19 小时前ROS2入门(一)
19 小时前网络安全技术与应用实验——SSL验证分析 & 基于DTLS的安全服务器设计
19 小时前R语言学习——作图
20 小时前用matlab对相机进行标定获取相机内参
1 天前精选PID算法详解
2 天前精选线性插值_c语言实现
2 天前PLC学习笔记(二):PLC结构(1)
2 天前【贝塞尔曲线拟合】
2 天前精选基于Gazebo的机械臂物体拾取线上仿真活动 | 诚邀各位开发者参与
2 天前centos下Pangolin 安装与使用
2 天前slam学习之——stereoVision.cpp实践
2 天前基于图像到UV Map映射的3D手部高保真重建网络(ICCV2021)
3 天前精选C++_实现一个简单的智能指针shared_ptr
3 天前











第三方账号登入
QQ 微博 微信