
请各位大佬指点一下。
ubuntu 20.04
noetic版本
ur是在github下载的。
运行了这三句代码
roslaunch ur_gazebo ur3.launch
roslaunch ur3_moveit_config ur3_moveit_planning_execution.launch sim:=true
roslaunch ur3_moveit_config moveit_rviz.launch config:=true
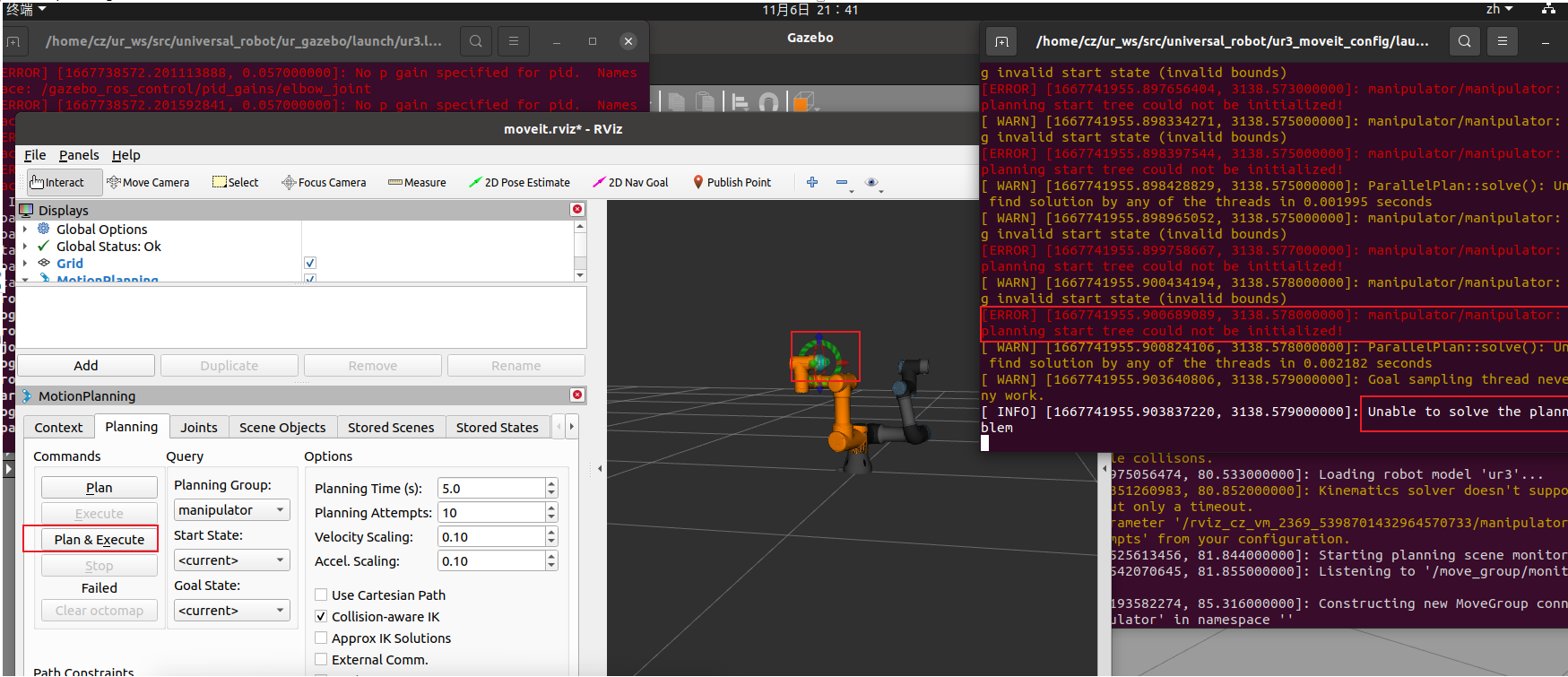
问题:用ur3进行仿真时候,第一次拖动机械臂末端到一个位置,然后plan&execute,机械臂可以到指定姿态,但是绕了一大圈,从地面下面转了一大圈到指定位置。
然后再次将机械臂末端拖动到一个点,plan&execute之后,出现以下错误。Motion planning start tree could not be initialized! Unable to solve the planning problem。
并且机械臂无动作。



第三方账号登入
QQ 微博 微信