


先贴部分视频,以后有时间了再加点介绍。
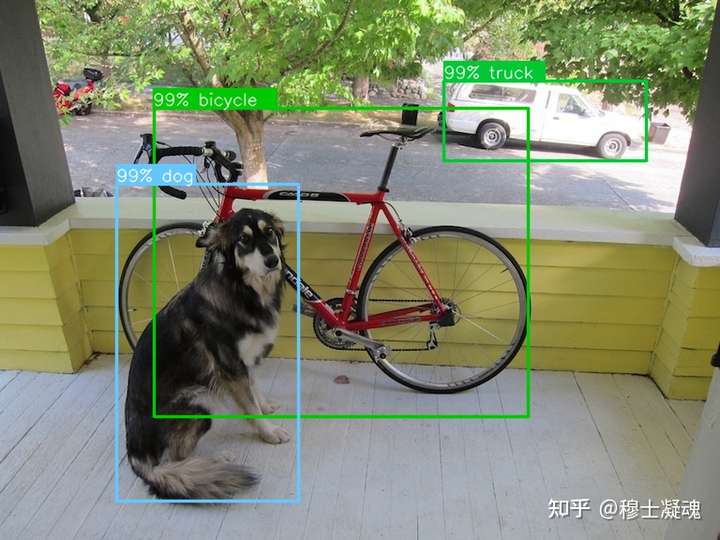
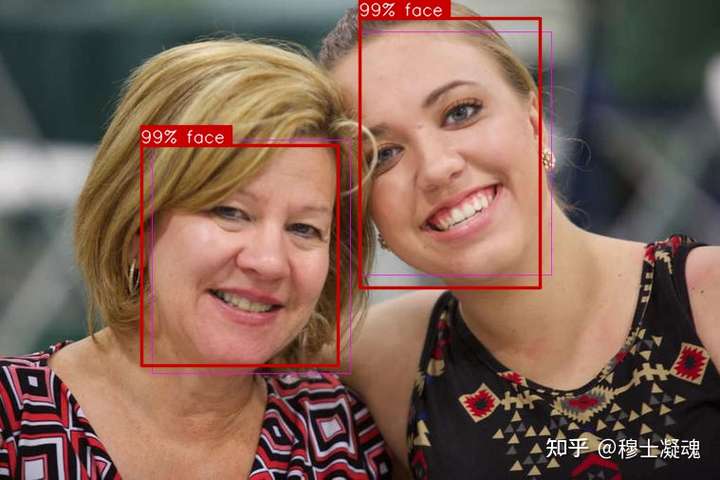
一. 开源一款深度学习+机器人视觉+机器人学开源框架Msnhnet:


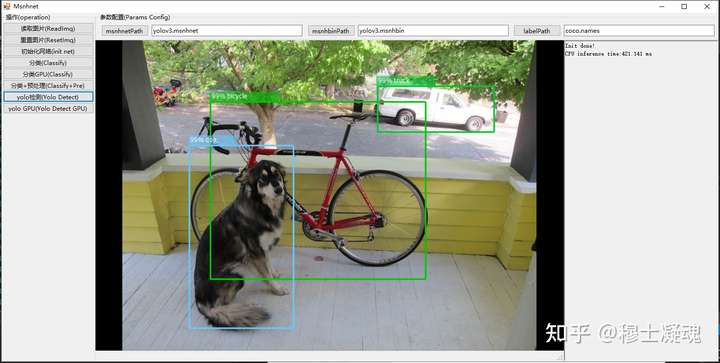
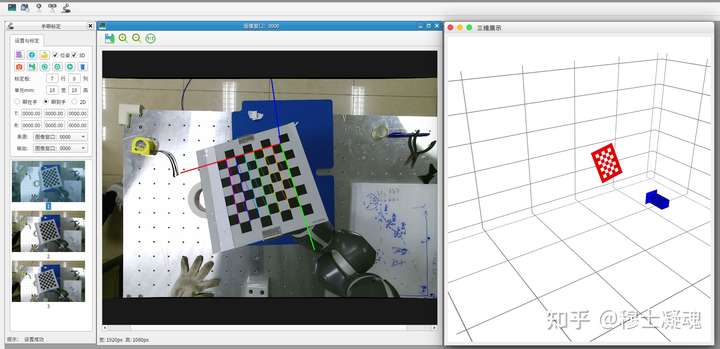
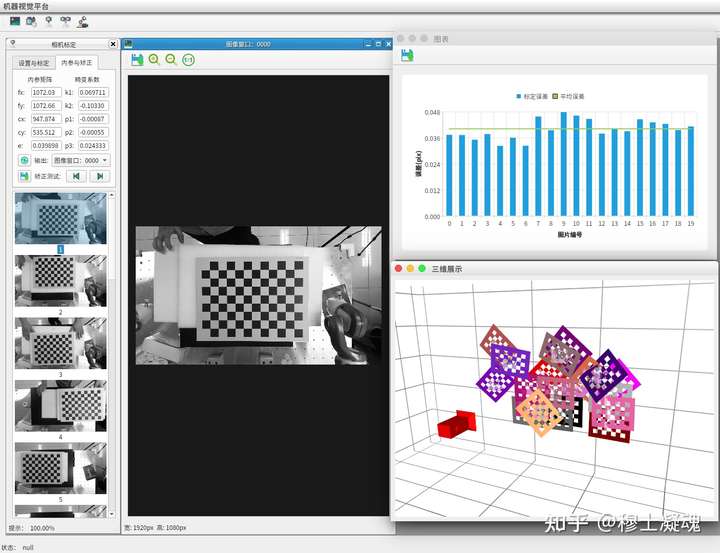
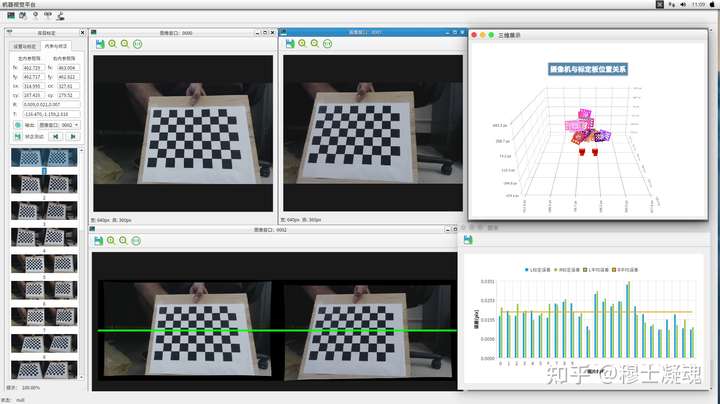
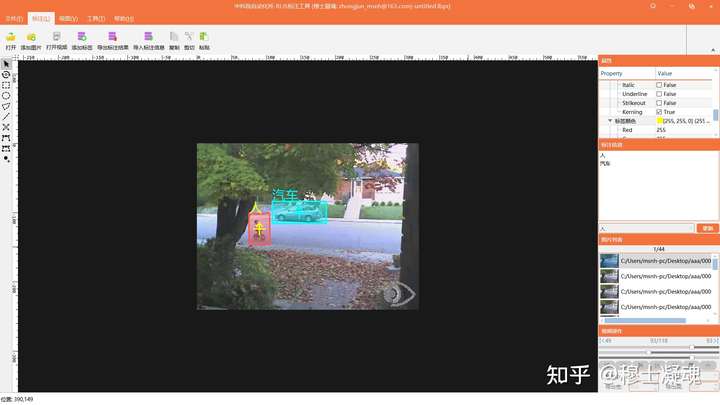
二. 机器人和机器人视觉软件



三. 项目视频:
两阶段模型复杂场景抓取:
顶会ICRA: GPR: Grasp Pose Refinement Network for Cluttered Scenes
抓吸一体:
顶会ICRA: POIS_ Policy-Oriented Instance Segmentation for Ambidextrous Robot Picking
虚实同步与实时渲染:
五指灵巧手抓握:
资源不存在
五指灵巧手(握个手):
数据手套控制五指灵巧手:
UR5+五指手遥操作-抽纸巾:
UR5+五指手遥操作-勾瓶子:
UR5+五指手遥操作-开瓶盖:
UR5+DLR+点云+PointNet:
简单2D双臂抓取任务:
双臂体感控制与遥操作;
简单2D单臂抓取任务:
机械臂+五指灵巧手+机器人视觉:
复杂场景任务抓取:
点云吸附:
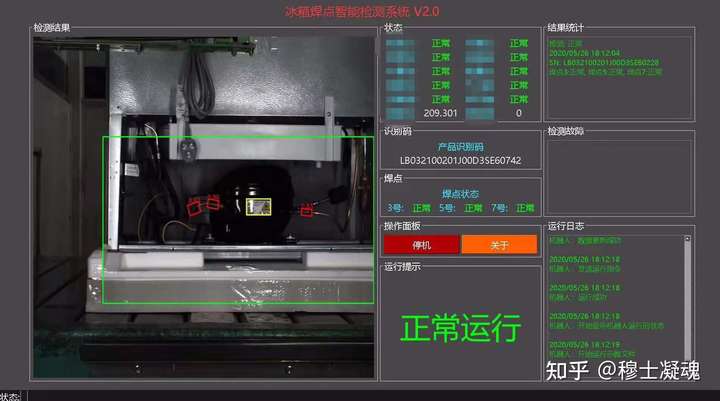
AI+机器人智能作业系统:
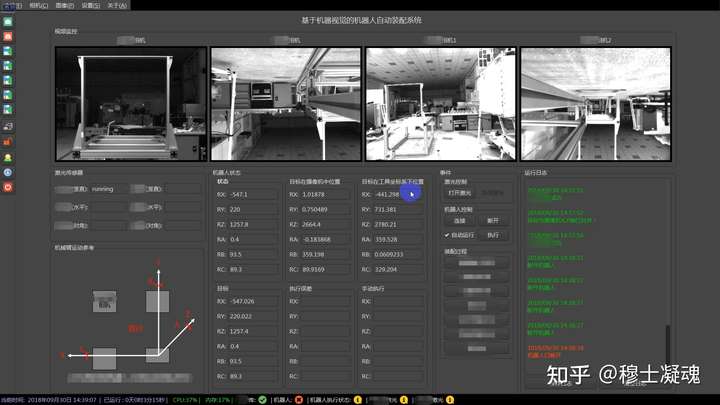
大部件自动装配系统:
移动机器人+机械臂+五指手测试:
基于EMG的智能义肢(DEMO):



评论(0)
您还未登录,请登录后发表或查看评论