

1. 函数定义
void warpPolar(
InputArray src,
OutputArray dst,
Size dsize,
Point2f center,
double maxRadius,
int flags
);
- dsize: 目标图像尺寸
- center:变换中心(圆心)
- maxRadius:要变换的圆形的半径,也是反向变换的圆的半径
- flags:插值方法+映射模式
- WARP_POLAR_LINEAR:线性极坐标映射
- WARP_POLAR_LOG:半对数极坐标映射
- WARP_INVERSE_MAP:反向映射
2. 例程

#include "stdafx.h"
#include <opencv.hpp>
using namespace cv;
int main()
{
Mat img = imread("标准圆.bmp");
Mat img1, img2;
Point2f center = Point2f(img.cols / 2, img.rows/2);
//直角坐标系图像转为极坐标系图像
warpPolar(img, img1, Size(300,600), center, center.x,INTER_LINEAR + WARP_POLAR_LINEAR);
//极坐标系图像转为直角坐标系图像
warpPolar(img1, img2, Size(img.rows,img.cols), center, center.x,INTER_LINEAR + WARP_POLAR_LINEAR + WARP_INVERSE_MAP);
imshow("原图", img);
imshow("直角坐标-极坐标", img1);
imshow("极坐标-直角坐标", img2);
waitKey(0);
return 0;
}
3. Halcon的极坐标转换算子
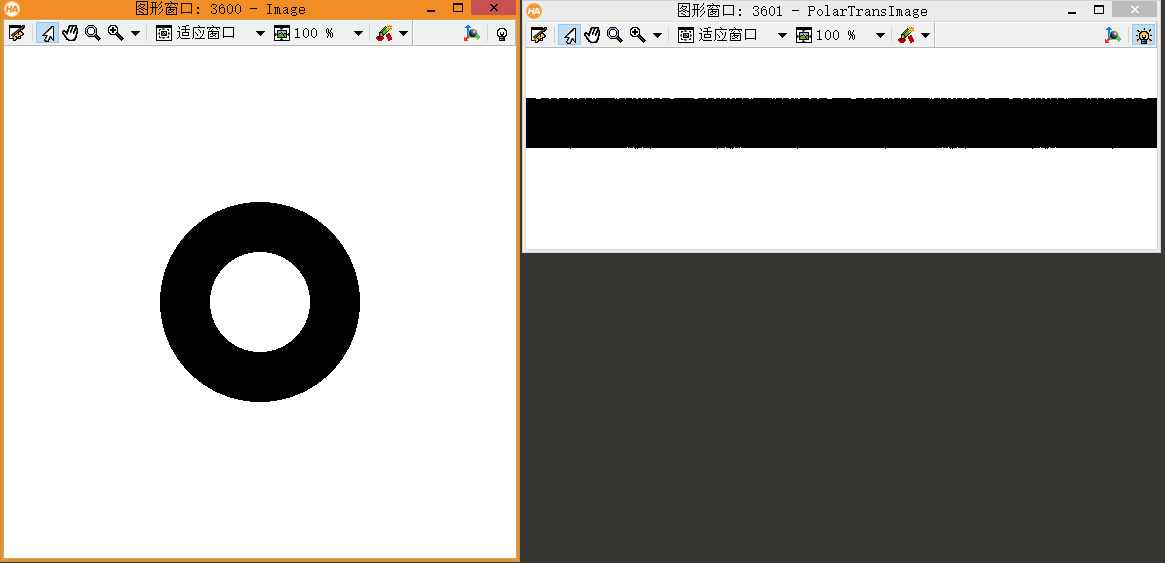
halcon代码:
read_image (Image, '标准圆.bmp')
* 图像分割
binary_threshold (Image, Region, 'max_separability', 'dark', UsedThreshold)
smallest_circle (Region, Row, Column, Radius)
* 极坐标转换
ImageWidth:=2*rad(180)*Radius
polar_trans_image_ext (Image, PolarTransImage, Row, Column, rad(0), rad(360), 0, 2*Radius, ImageWidth, 2*Radius, 'nearest_neighbor')
dev_display (PolarTransImage)
转载自:https://liuhui.blog.csdn.net/article/details/121914408



评论(0)
您还未登录,请登录后发表或查看评论