
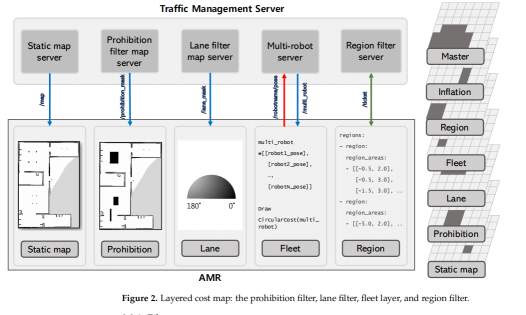
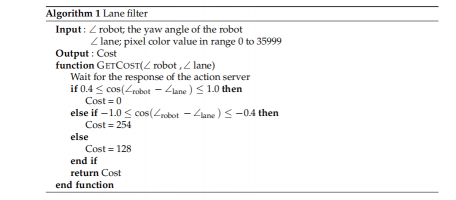
研一,老师让照着论文“Layered-Cost-Map-Based Traffic Management for Multiple AMRs via a DDS ”复现,其中论文提到的基于cosmap分层管理实现机器人的交通管理,功能1禁区功能在github能找到,后面的车队层和专用区层有伪代码,但是如何实现暂时没什么头绪。希望各位大神提供思路,应该从哪些方面下手。

研一,老师让照着论文“Layered-Cost-Map-Based Traffic Management for Multiple AMRs via a DDS ”复现,其中论文提到的基于cosmap分层管理实现机器人的交通管理,功能1禁区功能在github能找到,后面的车队层和专用区层有伪代码,但是如何实现暂时没什么头绪。希望各位大神提供思路,应该从哪些方面下手。
您还未登录,请登录后发表或查看评论




第三方账号登入
QQ 微博 微信