

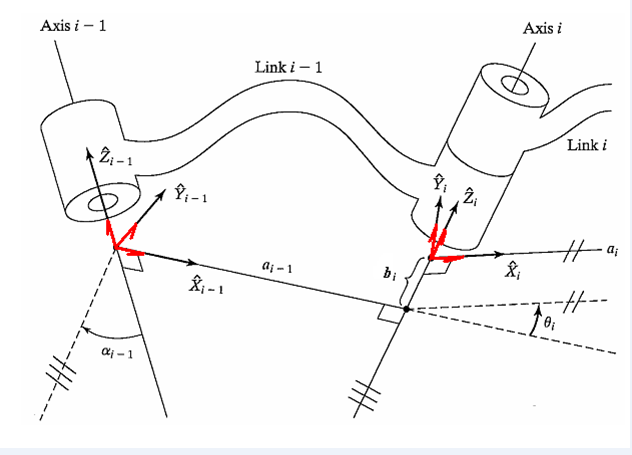
1. 建立各个连杆的坐标轴
- 关节i的轴向方向为坐标系i的Zi轴;
- 取Zi-1和Zi轴的公法线方向为Xi-1轴;若两个Z轴相交,则取两个Z轴的叉积方向作为X轴方向。
- Zi轴和Xi轴交点为坐标系i的原点;
- 右手定则确定Yi轴,Yi =Zi"×" Xi
2.D-H参数的确定
- 连杆长度ai-1:沿着Xi-1轴,从Zi-1轴到Zi轴的距离;
- 连杆扭角"α" _“i-1”:Zi-1到Zi的转角,绕Xi-1轴正向转动为正;
- 关节距离di:Xi-1到Xi的距离,沿Zi轴正向,始终为正值;
- 关节转角"θ" i:Xi-1到Xi的转角,绕Zi轴正向转动为正。
相邻两个关节的变换矩阵如下:

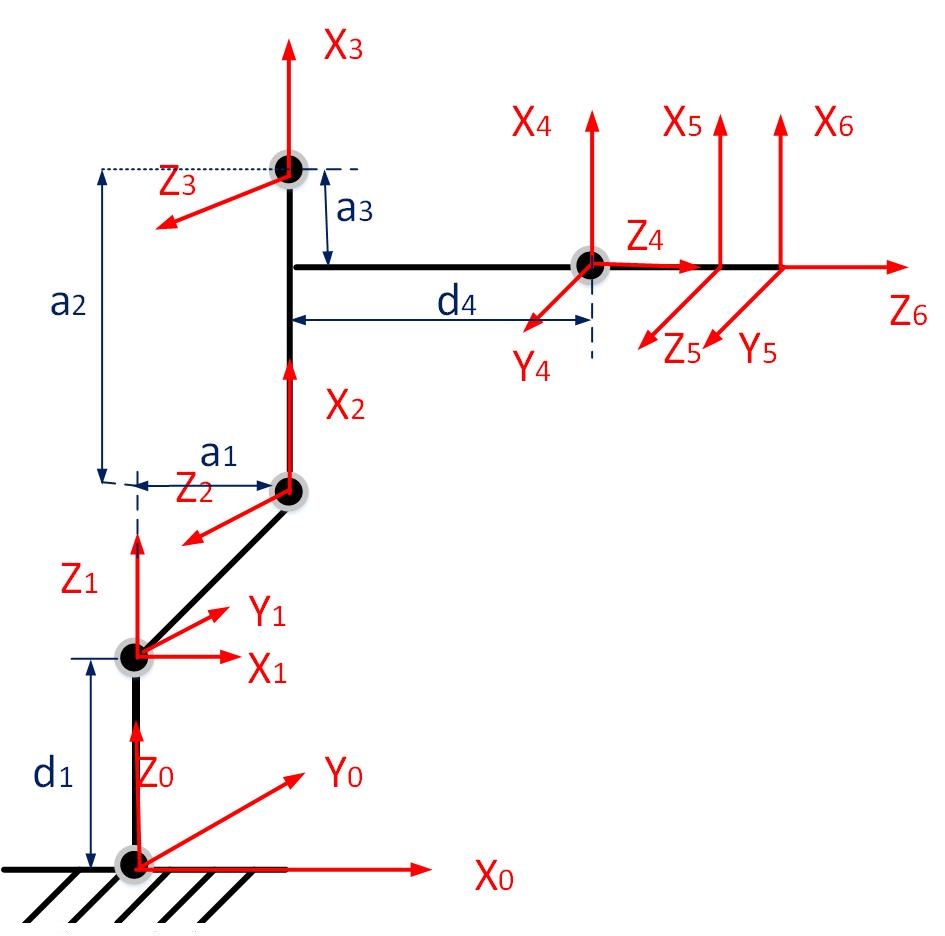
6R机器人连杆坐标系示意图
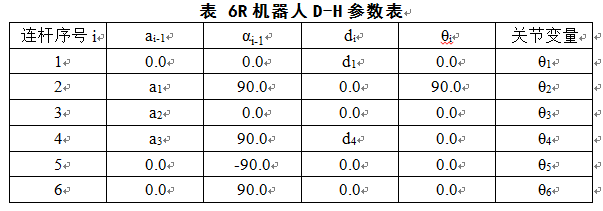
D-H参数表如下表:
欢迎关注知乎专栏:Jungle是一个用Qt的工业Robot
欢迎关注Jungle的微信公众号:Jungle笔记


评论(0)
您还未登录,请登录后发表或查看评论