

Matlab机器人工具箱(3)——轨迹规划
- 前言
- 1、通用的规划方法
-
- 1.1、点到点的规划
-
- 五次多项式
- 梯形轨迹(抛物线过渡的直线插值)
- 多维的情况
- 1.2 via point 的情况
- 1.3姿态插值
- 位姿插值
- 2、机器人关节空间轨迹规划
- 机器人笛卡尔空间轨迹规划
- 总结
前言
承接上一篇博客Matlab机器人工具箱(2)——预分析(可达空间与可操作性的可视化),本篇介绍轨迹规划的方法,包括通用的规划方法,关节空间的规划和笛卡尔空间的轨迹规划。
*说明:*之前用的是10.2版本的工具箱,发现了一些bug,现在更新成了10.4的,有需要的可以在Peter Corke老爷子的网站上下载
1、通用的规划方法
1.1、点到点的规划
五次多项式
代码:
%% 五次多项式插值,0-1,插值50个点
s=tpoly(0 ,1 ,50);
[s,sd,sdd]=tpoly(0 ,1 ,50); %把速度,加速度也得出来
plot(s);hold on;
s=tpoly(0 ,1 ,50, 0.5, 0.5); % 指定起始点的速度
plot(s)
legend('端点速度为0','端点速度为0.5')
轨迹曲线: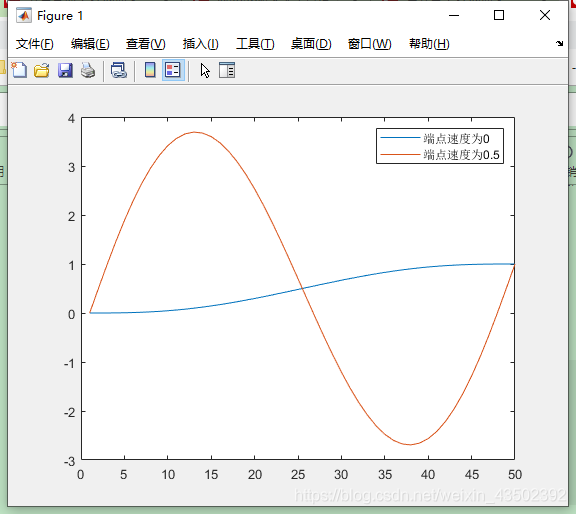
梯形轨迹(抛物线过渡的直线插值)
代码:
%% 梯形轨迹(抛物线过渡的直线插值)0-1,插值50个点
[s1,s1d,s1dd] = lspb( 0, 1, 50 );
[s2,s2d,s2dd] = lspb( 0, 1, 50, 0.025 ); % 指定直线段速度
figure
plot(s1d);hold on;
plot(s2d)
legend('默认','直线段速度为0.025')
figure
plot(s1);hold on;
plot(s2)
legend('默认','直线段速度为0.025')
轨迹曲线: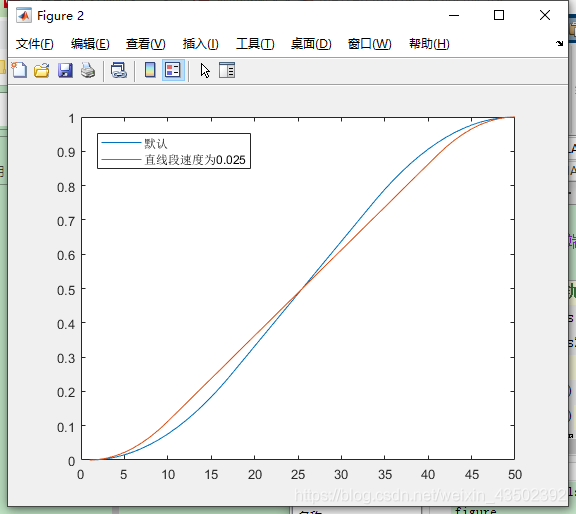
速度曲线: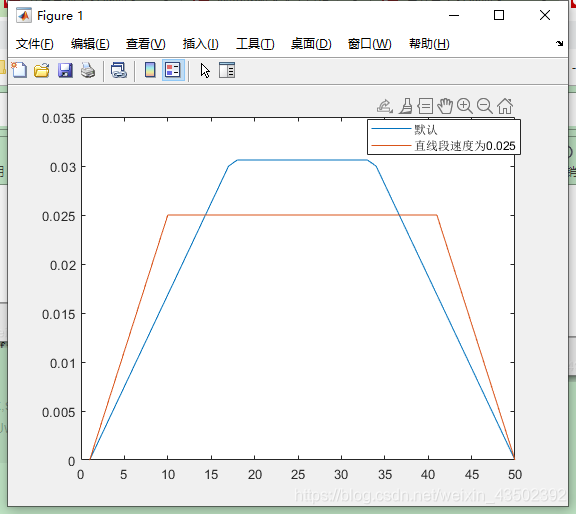
多维的情况
代码:
%% 多维的情况
% 插值函数 初始点 终点 插值个数
x=mtraj( @tpoly , [-1,0] , [1,-1], 100 );
figure
plot(x);
legend('x','y')
轨迹曲线: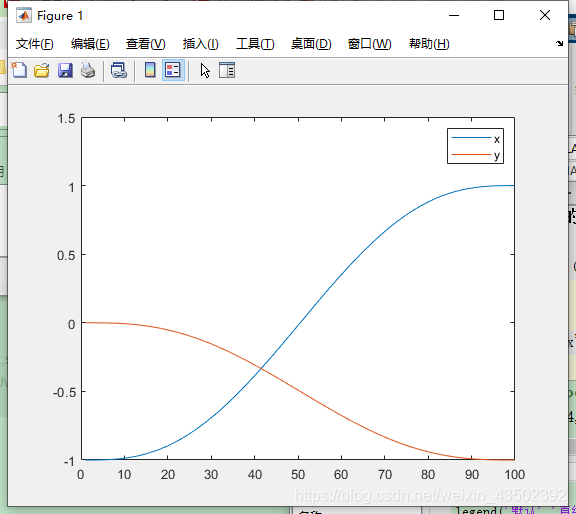
1.2 via point 的情况
代码:
%% via point 的情况
via = [ 4,1 ; 4,4 ; 5,2 ; 2,5 ];
% via points 最大速度 每段运行时间 起点各轴坐标 采样时间间隔 抛物线过渡时间
q = mstraj( via , [] , [2,2,2,2] , [3,0] , 0.05 , 1 );
figure
plot(q)
这里要注意,最大速度和每段运行时间是冲突的,只能指定一个,另一个为空。
轨迹图: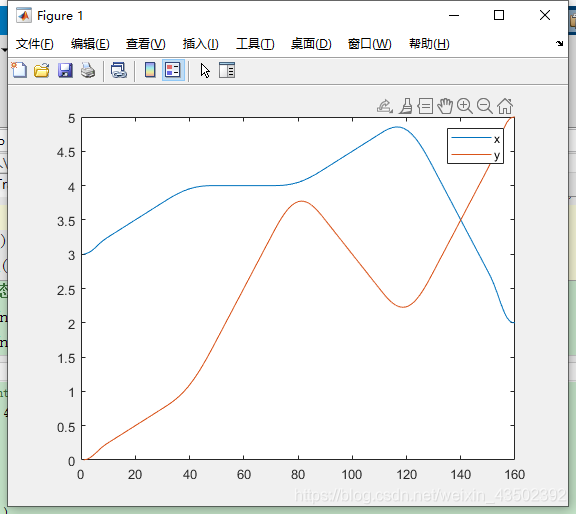
1.3姿态插值
鉴于其他方法的局限性,姿态插值一般用四元数进行:
代码:
%% 姿态插值 (四元数)
q0 = UnitQuaternion(eye(3));
q1 = UnitQuaternion(rpy2r(15,30,45));
q = interp(q0,q1,[0:49]'/49);
tranimate(q.R,'movie','quat.gif');
插值结果在三维空间的效果就是绕测地线单轴转动,这样插值是最快的结果,相当于欧式三维空间的直线插值。
提到这个gif,在Matlab机器人工具箱(1)——机器人的建立、绘制与正逆运动学中介绍了一个输出gif的方法,但是更新了RTB版本后发现了一个更方便的方法,plot也可以通用:
tranimate(q.R,'movie','quat.gif');
还可以输出mp4格式的视频,把.gif后缀改成.MP4就好啦。
位姿插值
RTB提供了直接对位姿规划的函数:
代码:
%% 位姿插值
T0 = rpy2tr(45,10,20);
T1 = transl(1,2,3)*rpy2tr(15,30,45);
Ts = trinterp(T0,T1,[0:49]'/49);
figure
tranimate(Ts);
figure
plot(transl(Ts))
figure
plot(tr2rpy(Ts));
% 指定插值轨迹
Ts_ = trinterp(T0,T1,lspb(0,1,50));
figure
plot(transl(Ts_))
figure
plot(tr2rpy(Ts_));
% 速记函数ctraj,相当于trinterp(T0,T1,lspb(0,1,50));
Ts_2 = ctraj(T0,T1,50);
figure
plot(transl(Ts_2))
figure
plot(tr2rpy(Ts_2));
这里就不放图了,太多了,可以自己去跑一跑。
2、机器人关节空间轨迹规划
这里以matlab自带的puma560机器人为例进行说明。值得说明的是,在 第1节 中介绍的通用方法,对关节空间的规划仍然有效,只不过RTB提供了更为简洁的函数,因此单独说明。
代码:
%% 机器人关节空间轨迹规划
mdl_puma560
T1 = transl(0.3,0,0.3)*rpy2tr(45,10,20);
T2 = transl(0.6,0,0.6)*rpy2tr(45,20,25);
q1 = p560.ikine6s(T1);
q2 = p560.ikine6s(T2);
t = 0:0.05:2;
% 速记代码,jtraj相当于 q = mtraj(@tpoly,q1,q2,t);
q = jtraj(q1,q2,t);
% 还可以输出关节角速度和角加速度
[q,qd,qdd] = jtraj(q1,q2,t);
p560.plot(q,'trail','b-','movie','jtraj.gif')
机器人笛卡尔空间轨迹规划
在 第1节 中介绍的通用方法,对笛卡尔空间轨迹规划仍然有效,只不过RTB提供了更为简洁的函数,因此单独说明。
代码:
%% 机器人笛卡尔空间轨迹规划
mdl_puma560
t = 0:0.05:2;
T1 = transl(0.3,0,0.3)*rpy2tr(45,10,20);
T2 = transl(0.6,0,0.6)*rpy2tr(45,20,25);
Tc = ctraj(T1,T2,length(t));
figure
plot(t',transl(Tc));
figure
plot(t',tr2rpy(Tc));
figure
qc = p560.ikine6s(Tc);
p560.plot(qc,'trail','b-','movie','ctraj.gif')
只放个动图吧。
总结
本文介绍了RTB工具箱中关于轨迹规划部分常用的函数,一定注意工具箱的版本,越新越好,因为越新bug越少。下面会继续介绍动力学相关的部分。




评论(0)
您还未登录,请登录后发表或查看评论