

英文教程:http://gazebosim.org/tutorials?tut=quick_start&cat=get_started
《一》运行gazebo
打开有默认环境的gazebo只需要三步:
1、下载gazebo
2、打开一个终端。绝大部分在Ubuntu系统中你可以按CTRL+ALT+t去打开一个终端。
3、在当前打开的终端中输入gazebo就可以打开gazebo工具
提示:第一次你打开gazebo,它会下载一些模块,所以可能需要一些时间才完整打开。
《二》打开带有机器人的gazebo环境
通过加载pioneer2dx的world文件,我们可以仿真一些有趣的东西。
打开一个终端,输入如下命令:
gazebo worlds/pioneer2dx.world
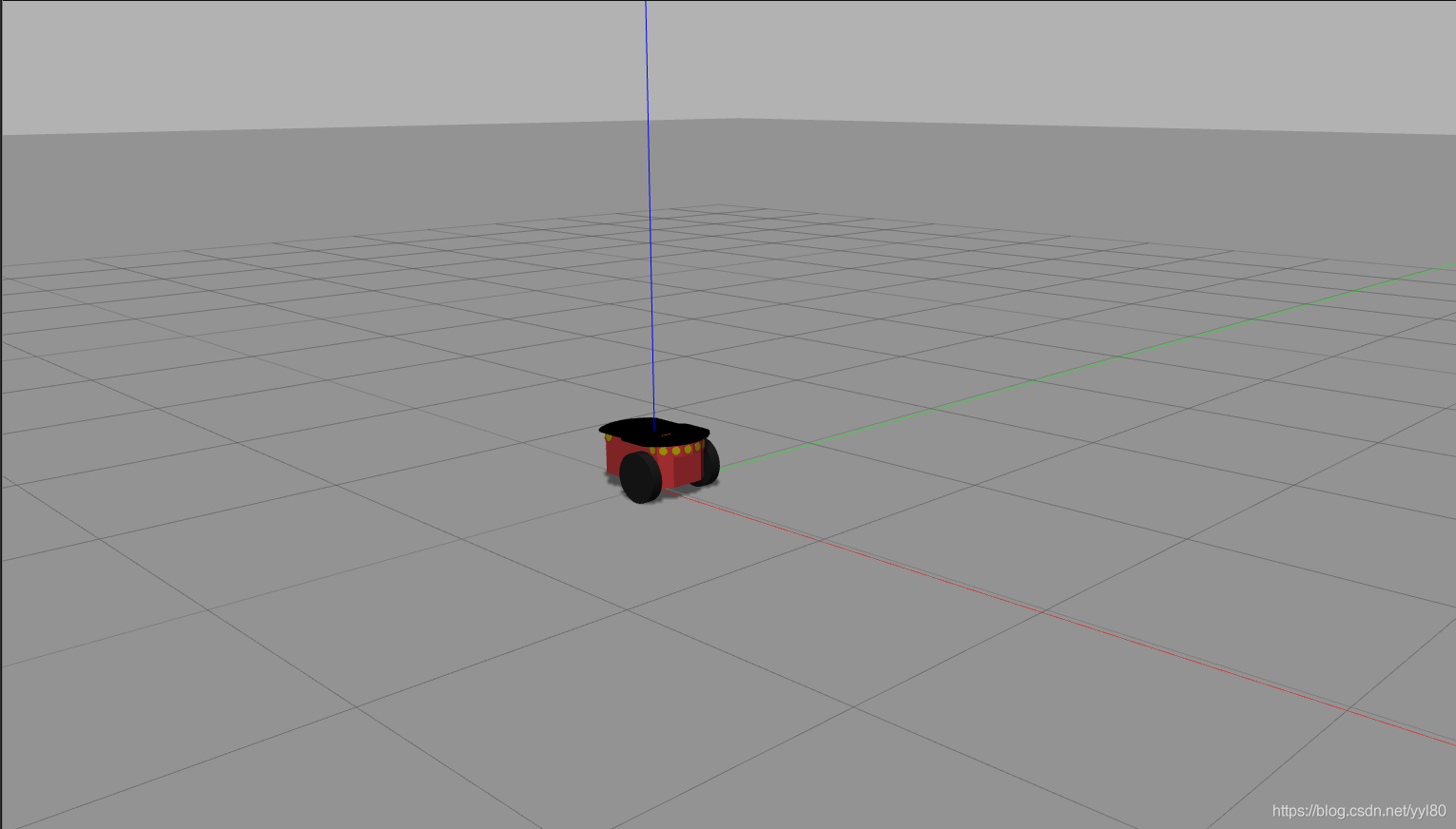
提示:如果你没有pioneer2dx这个模型,gazebo会在线下载,可能需要一些时间。
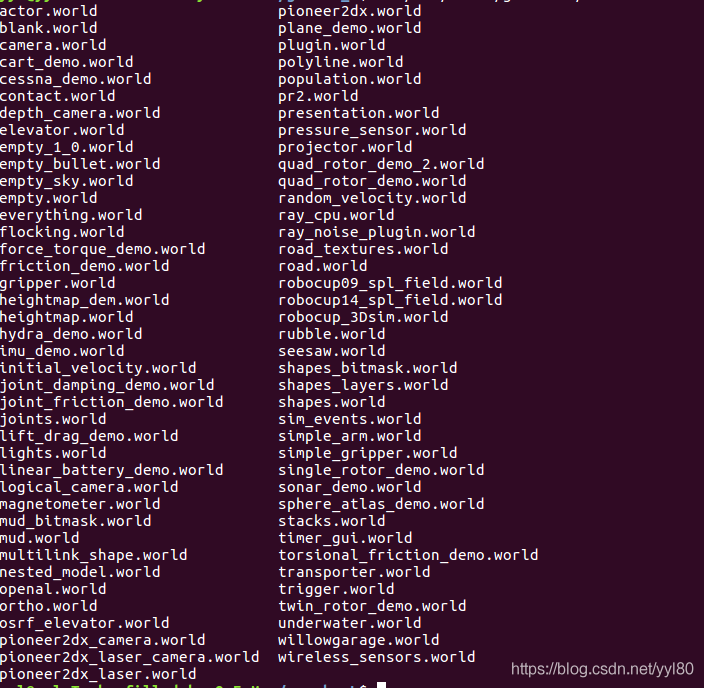
《三》worlds文件放在哪里?
你可能对上面这个命令worlds/pioneer2dx.world感到奇怪。接下来就告诉你去哪里找到pioneer2dx.world 文件和在一开始加载它。
world文件是在系统版本的文件夹中,比如在Ubuntu的是/usr/share/gazebo-7 。如果你已经在Ubuntu系统上安装了gazebo7.0,在一个终端中输入以下命令。你就会看到一系列world文件
ls /usr/share/gazebo-7/worlds
对于gazebo7.0在osx中
ls /usr/loacl/share/gazebo-7/worlds
《四》客户端和服务端分离
gazebo这个命令包含两部分内容:打开客户端gzclient和服务端gzserver。
gzserver的作用是实现物理环境的循环更新和传感器的数据产生。这是gazebo的核心和可以独立与图形接口去使用。你可能看到过“无头奔跑”这个词语,这就是只是启动gzserver。一个涉及使用gzserver的例子是云服务器即用户的界面不需要。
gzclient运行的是基于QT的用户界面。这个应用程序在仿真过程提供一个不错的可视化界面和方便控制不同的仿真特性。
这个连个界面可以通过两个不同的命令单独启动:
gzserver和gzclient




评论(0)
您还未登录,请登录后发表或查看评论