

一.创建一个7-DOF机械臂机器人
创建一个名为seven_dof_arm.xacro的文件,写入相应的代码,其关节名称如下:
bottom_joint
shoulder_pan_joint
shoulder_pitch_joint
elbow_roll_joint
elbow_pitch_joint
wrist_roll_joint
wrist_pitch_joint
gripper_roll_joint
finger_joint1
finger_joint2
二.解析7-DOF机械臂的xacro模型
我们将在这个机器人上定义10个连杆和9个关节,在机器人夹爪中定义2个连杆和2个关节。
1.使用常量
在xacro中使用常量可以让机器人的描述更简短、更可读。我们定义了每个连杆的角度-弧度换系数、PI值、长度 、高度和宽度:
<xacro:property name="deg_to_rad" value="0.01745329251994329577"/>
<xacro:property name="M_PI" value="3.14159"/>
<xacro:property name="elbow_pitch_len" value="0.22" />
<xacro:property name="elbow_pitch_width" value="0.04" />
<xacro:property name="elbow_pitch_height" value="0.04" />
2.使用宏
在以下代码中定义了宏,避免重复并使代码更加简短。如下:
85 <xacro:macro name="inertial_matrix" params="mass">
86 <inertial>
87 <mass value="${mass}" />
88 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="0.5" iyz="0.0" izz="1. 0" />
89 </inertial>
90 </xacro:macro>这是惯性矩阵宏的定义,其中我们用mass作为参数。
92 <xacro:macro name="transmission_block" params="joint_name">
93 <transmission name="tran1">
94 <type>transmission_interface/SimpleTransmission</type>
95 <joint name="${joint_name}">
96 <hardwareInterface>hardware_interface/PositionJointInterface</ha rdwareInterface>
97 </joint>
98 <actuator name="motor1">
99 <hardwareInterface>hardware_interface/PositionJointInterface</ha rdwareInterface>
100 <mechanicalReduction>1</mechanicalReduction>
101 </actuator>
102 </transmission>
103 </xacro:macro>在这段代码中我们可以看到使用transmission(传动)标签的定义。
transmission标签将关节与执行机构相关联。它定义了我们在某一关节中使用的传动类型,马达的类型即参数。
它还定义了我们与ROS控制器通信时使用的硬件接口的类型。
3.包含其他xacro文件
我们可以通过使用xacro : include标签包含传感器的xacro定义来扩展xacro的功能。下面代码片段展示了如何在机器人xacro中包含传感器定义:
<xacro:include filename="$(find mastering_ros_robot_description_pkg)/urd f/sensors/xtion_pro_live.urdf.xacro"/>
在这里我们包含了一个叫做Asus Xtion pro的传感器的xacro定义,当解析xacro文件时,这个定义被展开
使用"$(find mastering_ros_robot_description_pkg)/urd f/sensors/xtion_pro_live.urdf.xacro"/>我们就可以访问传感器的xacro定义,
其中find是查找当前mastering_ros_robot_description_pkg软件包的位置。
4.使用机器人夹爪
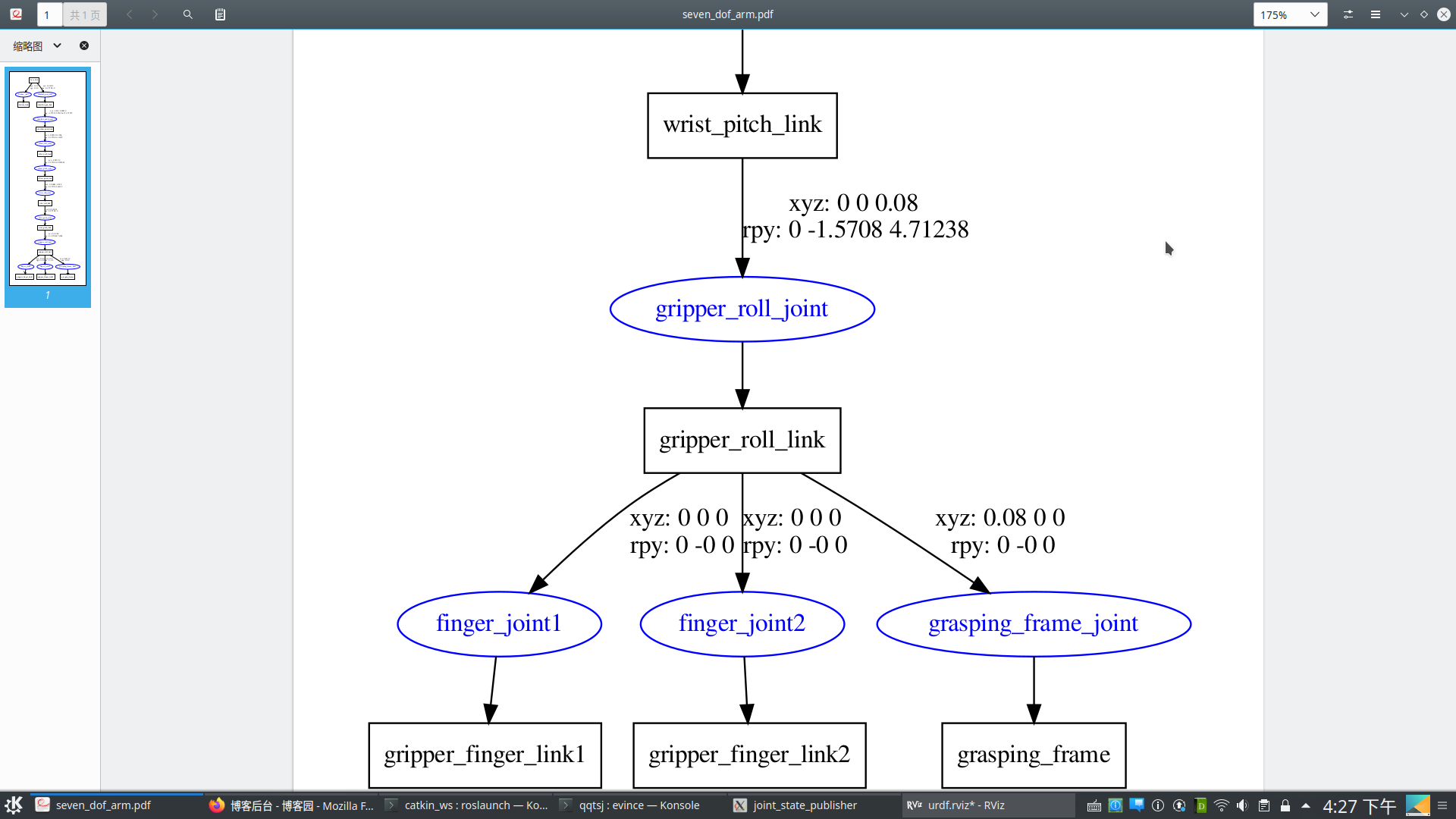
机器人夹爪用于抓取和放置物体,夹爪属于简单的连接类型,他有2个关节,每个关节都是滑动关节,以下是一个夹爪关节的joint定义:
440 <joint name="finger_joint1" type="prismatic">
441 <parent link="gripper_roll_link"/>
442 <child link="gripper_finger_link1"/>
443 <origin xyz="0.0 0 0" />
444 <axis xyz="0 1 0" />
445 <limit effort="100" lower="0" upper="0.03" velocity="1.0"/>
446
447
448 <safety_controller k_position="20"
449 k_velocity="20"
450 soft_lower_limit="${-0.15 }"
451 soft_upper_limit="${ 0.0 }"/>
452
453
454 <dynamics damping="50" friction="1"/>
455 </joint>
在这里,夹爪的第一个关节由gripper_roll_link和gripper_finger_link1构成,第二个关节由gripper_roll_link和gripper_finger_link2构成。
连接结构如图所示:
5.在RViz中查看7-DOF机械臂
建立好机器人的模型后,我们可以在RViz中查看设计好的xacro文件,并使用关节状态发布者(joint state publisher)节点控制每个关节,使用机器人状态发布者(robot state publisher)节点发布机器人状态。
可以使用名为view_arm.launch的启动文件去启动机器人仿真,代码如下:
1 <launch>
2 <arg name="model" />
3 <!-- Parsing xacro and setting robot_description parameter -->
4
5 <param name="robot_description" command="$(find xacro)/xacro --inorder $(find mastering_ros_robot_description_pkg)/urdf/seven_dof_arm.xacro" />
6
7
8 <!-- Setting gui parameter to true for display joint slider -->
9 <param name="use_gui" value="true"/>
10
11 <!-- Starting Joint state publisher node which will publish the joint v alues -->
12 <node name="joint_state_publisher" pkg="joint_state_publisher" type="jo int_state_publisher" />
13
14 <!-- Starting robot state publish which will publish tf -->
15 <node name="robot_state_publisher" pkg="robot_state_publisher" type="st ate_publisher" />
16
17 <!-- Launch visualization in rviz -->
18 <node name="rviz" pkg="rviz" type="rviz" args="-d $(find mastering_ros_ robot_description_pkg)/urdf.rviz" required="true" />
19
20 </launch>使用以下命令启动URDF:
$ roslaunch mastering_ros_robot_description_pkg view_arm.launch
该机器人将在RViz上显示,且同时打开了关节状态发布者(joint state publisher)的GUI
如图所示:

理解关节状态发布者
关节状态发布者(joint state publisher)是一个ROS软件包,常用于与机器人的每个关节进行交互。该软件包包含joint_state_publisher节点,该节点将从URDF模型中找到非固定关节,
并以sersor_msgs/JointState的消息格式发布每一个关节的关节状态值。
在前面的启动文件view_arm.launsh中,我们启动了joint_state_publisher节点并将一个命名为use_gui的参数设置为true,如下所示:
9 <param name="use_gui" value="true"/>
10
11 <!-- Starting Joint state publisher node which will publish the joint values -->
12 <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_st ate_publisher" />如果我们将use_gui设置为true,那么joint_state_publisher节点将显示一个基于滑动条控件的窗口来控制每个关节。
关节的下限位值和上限位值将取自joint标签内的limit标签相关联的上下限位数据。
理解机器人状态发布者
机器人状态发布者(robot state publisher)软件包可以将机器人的状态发布到tf,此软件包订阅了机器人的关节状态,使用URDF模型的运动表示来发布
每个连杆的3D姿态,我们可以在启动文件中使用以下代码来实现机器人状态发布者节点:
14 <!-- Starting robot state publish which will publish tf -->
15 <node name="robot_state_publisher" pkg="robot_state_publisher" type="stat e_publisher" />在前面的启动文件view_arm.launch中,我们启动了这个节点来发布机械臂的tf,我们可以通过点击RViz上的tf选项可视化机器人的变换。



评论(0)
您还未登录,请登录后发表或查看评论