

上一章传送门:
接下来我们探讨如何确定下降方向的向量 。
4.1 梯度法
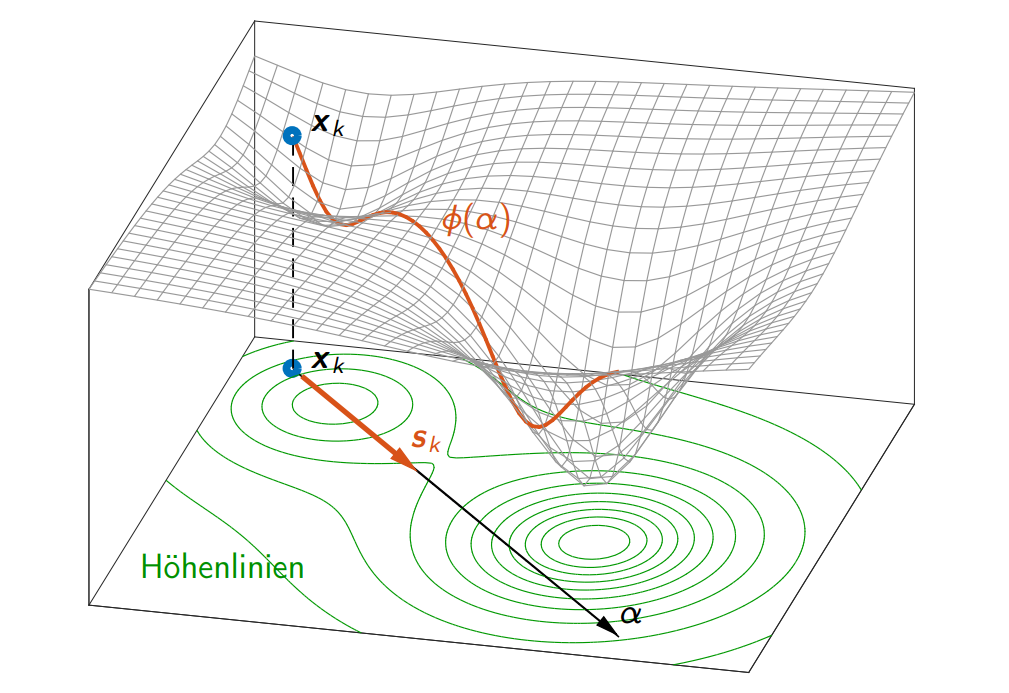
为了让代价函数沿最快速度方向下降到最小值,除了迭代步长,下降方向也至关重要。确定搜寻方向有许多方案,他们各有特色,依据精度,收敛速度以及计算复杂度相区别。最简单的一种方法,即沿着负梯度方向。那么
(4.1)
这就是梯度法,往往也被称为梯度下降法,易知满足一阶下降条件
(4.2)
梯度和等高线 正交,而沿着
位置变动。负的梯度能最小化上一章不等式(3.15)最小化,这也被称为最陡下降方向。
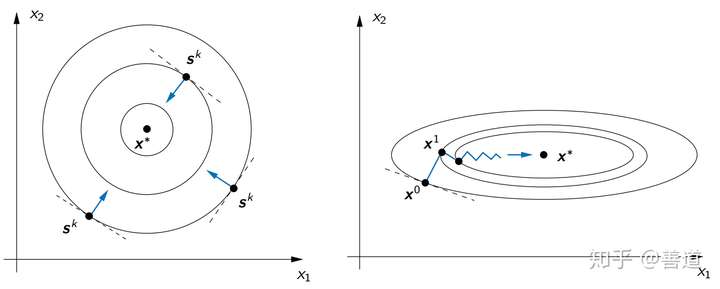
当给定条件较优时(比如 ),负梯度方向直指最小值的中心,从而梯度极快收敛到最小值。而如图右所示,给定条件恶劣时,负梯度方向并不直指最小值中心,下降的过程蜿蜒曲折,收敛速度很慢。
定理4.1 梯度下降收敛速率: 对于二次型函数,有正定矩阵
,其梯度下降法的线搜索精确解的收敛速度满足
(4.3)![[公式]](https://www.zhihu.com/equation?tex=f%28%5Cbold+x_%7Bk%2B1%7D%29-f%28%5Cbold+x%5E%2A%29%5Cleq%5Cleft%28%5Cfrac%7B%5Ckappa-1%7D%7B%5Ckappa%2B1%7D+%5Cright%29%5E2%5Cleft%5B+f%28%5Cbold+x%5Ek%29-f%28%5Cbold+x%5E%2A%29%5Cright%5D%2C%5Cquad+%5Ckappa%3D%5Cfrac%7B%5Clambda_%7Bmax%7D%7D%7B%5Clambda_%7Bmin%7D%7D)
其中为
表示了
条件的光谱,也直接影响了收敛速度。
总结来说,梯度下降法的优势为简单,而且在Newton法时,有更大的收敛范围。劣势为在条件恶劣时收敛速度很差,而且精度也受限。
4.2 共轭梯度法
这是原有的梯度法的变体,因为计算量没有高过太多,效率和收敛性质却显著优于梯度法。共轭梯度法充分利用了前一步迭代的信息,使得
(4.4)
(4.5)
第一步依然是最陡峭的负梯度下降方向,之后的每一步都依赖前一步信息更新,并有修正
(4.6)
这是由Fletcher和Reeves建议补充的。共轭梯度法基本上放弃了繁琐的矩阵运算,从而也对一些稍微大一点的问题可以应用,使用时也要注意存储器效率。此外梯度法所涉及的二次型 的最优问题中,可以在最多相当于向量
维数
的迭代中收敛。
4.3 Newton法
线搜索的一种特殊情况是,搜索方向的选择正好对应Newton法,此时的搜索方向 被称为Newton方向。首先需要代价函数
在
处近似的二次型模型
(4.7)
以此来找到最小的 ,通过对
求导,得到
(4.8)
根据 正定的假设,在
处Newton方向即
(4.9)
的逆矩阵必然也正定,显然也满足下降条件
(4.10)
Newton方向产生了 自然的迭代过程,因此,Newton法的大多数变体都以
步长作为标准,只有当代价函数
的下降低于边界时,才减小步长。
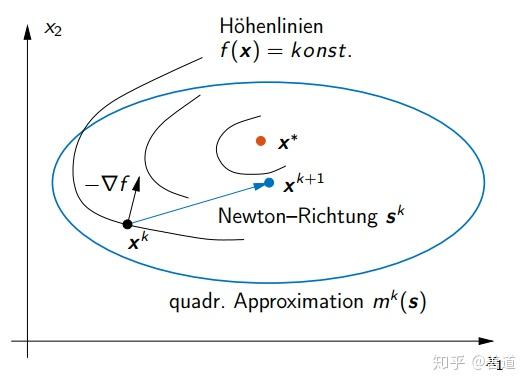
Newton法实质上是二阶的方法,因为趋近模型有三阶以上的误差。但它对高维系统也相对可靠实用,只要二次近似足够精确。图4.2表现了这个Newton法的方向相比较于最陡峭负梯度方向,更快速逼近最小值。
总结来说,Newton法的优势在于平方收敛,速度更快精度比一阶高,但存在局部收敛(不保证对任意 有
),而且计算Hesse矩阵耗时过多,特别是当维数很高的时候。
为获得全局最小的收敛,Newton法需要至少要保证Hesse矩阵的正定性。还可以通过近似或者Quasi-Newton法来避免Hesse矩阵的计算。
4.4 Quasi-Newton法
Quasi-Newton法是一个非常具有吸引力的对纯Newton法的替代方法,因为可以不用计算Hesse矩阵。反之,采用每次迭代更新逼近Hesse矩阵的方法。这样单步迭代梯度的信息就被充分利用,来提供有关沿搜索方向的二阶导数的信息。
先考虑梯度 在
处线性近似模型
(4.11)
对于足够小的 就可以近似表示前一步迭代的梯度
(4.12)
由此可以反推出Hesse矩阵的近似表达
(4.13)
不过这样又面临了一个新问题, 有
个待定元素,而却只有
个等式,必须给定更多条件,比如对称矩阵以及
之间的差值。给定了这些条件以后,就可以写出
并得到解析解。一个最有名的更新
的公式即BFGS公式(Broyden, Fletcher, Goldfarb, Shanno)
(4.14)
其中简写表示 。
起始位置在 ,那么
抑或是最简单的单位矩阵
。
Newton法中还需要计算Hesse矩阵的逆矩阵,所以直接给出等价的逆矩阵 公式就更方便了。
(4.15)
于是就能得到Quasi-Newton法的搜索方向
(4.16)
Quasi-Newton法通过很快收敛速度表现抢眼,原则上纯Newton法的收敛速度达不到这种程度,这无外乎向量矩阵运算 远快于计算Hesse矩阵以及它的逆矩阵。另一个相对于纯Newton法的优势即矩阵奇异性的问题不再出现,因为至少在求精确解的时候保证了
的正定性。而且和同样地,Quasi-Newton法对之前共轭梯度法所涉及的二次型
的最优问题中,也可以在最多相当于向量
维数
的迭代中收敛。
4.5 其他数值方法
接下来介绍两种对于无约束最优问题的其他数值方法:置信域法和直接搜索法。
前者类似于线搜索,后者则是不必估算梯度。
4.5.1 置信域法
不同于之前介绍的线搜索法,置信域法构造了代价函数 局部的简单模型
用它来替代原有模型求解局部的最小值。
(4.17)
因为 只在足够小
的局部精确,寻找
的最小值要受到置信区间的约束
,近似模型一般也是选用二次型函数
(4.18)
其中 也之前提到的Hesse矩阵或者相应的近似表达。于是关于
的最优解导向了对于下一个点
的可能的候选方向。若对应的下一个函数值
没有导致先前成本函数值
的充分减小,则置信区间
减小,并且再次求解(4.1)。
当每次迭代不断减小 则新的推算位置和当前位置之间的距离更小了,而
理论上就会指向新的方向。由此发现线搜索法和置信域法的区别,那便是下一步的方向和步长如何选择:
- 线搜索专注
的搜索方向,并需要确定合适的步长
- 置信域法先划出一个最大可信范围
,然后同时决定一个合适的方向和步长
,到达下一个迭代点
,如有必要,可缩小信任区域并重复搜索。
置信区间 在每个迭代步骤中根据模型
和代价函数
的一致性进行调整。
(4.19)
评估了模型和代价函数在一次迭代中的下降的相差程度,所以若
意味着模型和现实符合得很好,于是在下一步中可以继续放大置信区间。而如果
,那么下一次迭代中必须缩减
。
4.5.2 直接搜索法
之前几个方法都是跟求导相关的,需要用到梯度信息,不过有些时候偏导不存在或者不容易接近或者需要极大计算量,这是一些太复杂或者不再连续可微的问题。可以借助直接搜索/不求导搜索法,只需要借助一些采样点来算出一系列函数值,再来确定迭代点。在非线性最优化中,一个最知名同时又是最简单的方法即Nelder-Mead法。这个算法基于n维空间的单纯形。它由 个点
张开。对
即直线,
即三角形,以此类推。
对由 个点构成的单纯形(Simplex),同时计算对应坐标的函数值并排序,得到升序
(4.20)
于是这个算法就用一个新的点替换掉最“坏”的点 ,根据公式
(4.21)
该公式由参数 控制,而
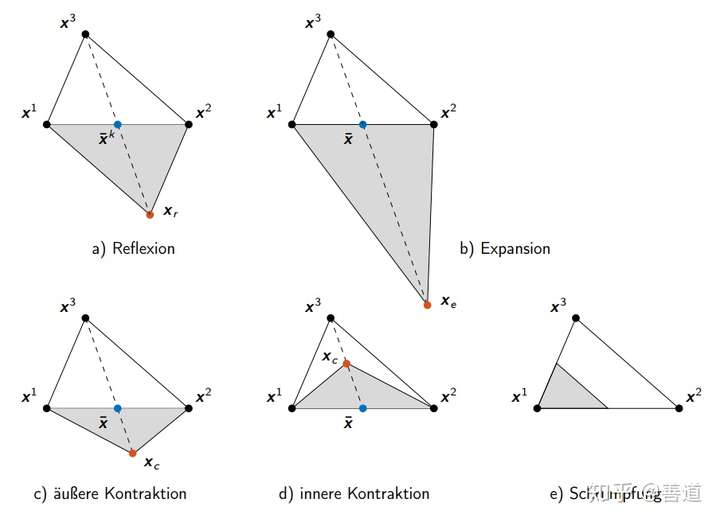
为这个单纯形的重心,根据直线公式可以得到不同的作图法,来获得合适的新的点:反射,扩张,内/外缩以及收缩。
- [a]反射(Reflection)图a):反射点为
。若
,则令
- [b]扩张(Expansion)图b):若
,点为
。若
,则令
。否则令
。
- [c]外缩(äußere Kontraktion)图c):若
,则令
。若
,则令
。否则继续执行步骤收缩步骤[e]。
- [d]内缩(innere Kontraktion)图d):若
,则令
。若
,则令
- [e]收缩(Schrumpfung)图e):把单纯形压缩在最优点为
。令
,
单纯形算法通过不断迭代进行,直到收敛判据达成。单纯形沿着最优方向游走,不过并不能完全保证收敛,也可能会收敛在一个非最优的点。不过实操时,单纯形法往往有很好的结果,而且收敛速度也很快。由于它高鲁棒性,算法又简单,是一个非常常用的算法。
参考文献:
Numerische Optimierung und modellprädiktive Regelung (WS 2019/2020), A. Völz, K. Graichen, Lehrstuhl für Regelungstechnik, Friedrich-Alexander-Universität Erlangen-Nürnberg




评论(0)
您还未登录,请登录后发表或查看评论