

上文中我们提到了机器人动力学方程的四种形式,其中的第四种(最小惯性参数集)形式对于机器人的系统辨识及控制尤其重要。
- 对于一根杆件,共需如下十个经典参数描述它的质量分布情况:惯性张量矩阵,如下所示,共有六个参数
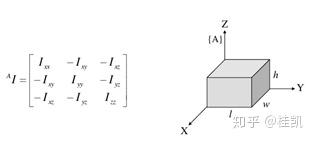
- 质量M
- 三维质心(X,Y,Z),一般我们会把质量乘上质心,组成一个最终的三个惯性参数(MX,MY,MZ),这么做的原因在于动力学中的重力矩一般包含质量乘质心这一项。
综上所述,一根杆件的动力学特性会涉及到这十个变量,但由于运动副限制,并不是这十个参数都对动力学特性有影响,下面举两个例子说明。
1)垂直面的单杆摆动,它的动力学方程一般形式为 ,共有三个参数与动力学有关,也即它的最小惯性参数数量为3
2)水平面的单杆运动,它的动力学方程是 ,共有一个参数与动力学有关,也即它的最小惯性参数数量为1。
理解上述现象后,我们可以推论到,系统辨识并不能获得杆件的所有惯性参数,只能获取最小惯性参数集里的参数,因为它们与动力学特性有关。
————————————————分割线————————————————
现在我们来看PUMA560这种构型的机器人(共有6*10个经典惯性参数),它的最下惯性参数一共有几个。
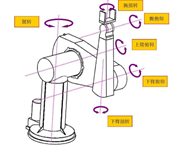
历史上有不少方法来确定最小惯性参数集,目前最好用的是只给予DH坐标系即可获得,它的基本思想是把机器人的关节构型细分为七类;对于PUMA50来说,它的2~6关节属于R1,每个杆件的最小惯性参数为7个。

1关节属于R3,杆件1只有1个最小惯性参数。

综上所述,这种典型的工业机器人共有36个最小惯性参数,我们通过系统辨识方法,也主要是辨识这些参数。




评论(0)
您还未登录,请登录后发表或查看评论