

硬知识
选自《普中51单片机开发攻略_V1.2》
IO 口扩展方式-串转并
使用的芯片是 74HC595。开发板板载 1 个 74HC595 芯片,仅需单片机 3 个 IO 口即可扩展 8 个,如果需要还可以将 2 个 74HC595 级联扩展出 16 个 IO,这就实现用少数 IO 资源控制多个设备。
74HC595 芯片介绍
74HC595 是一个 8 位串行输入、并行输出的位移缓存器,其中并行输出为三 态输出(即高电平、低电平和高阻抗)。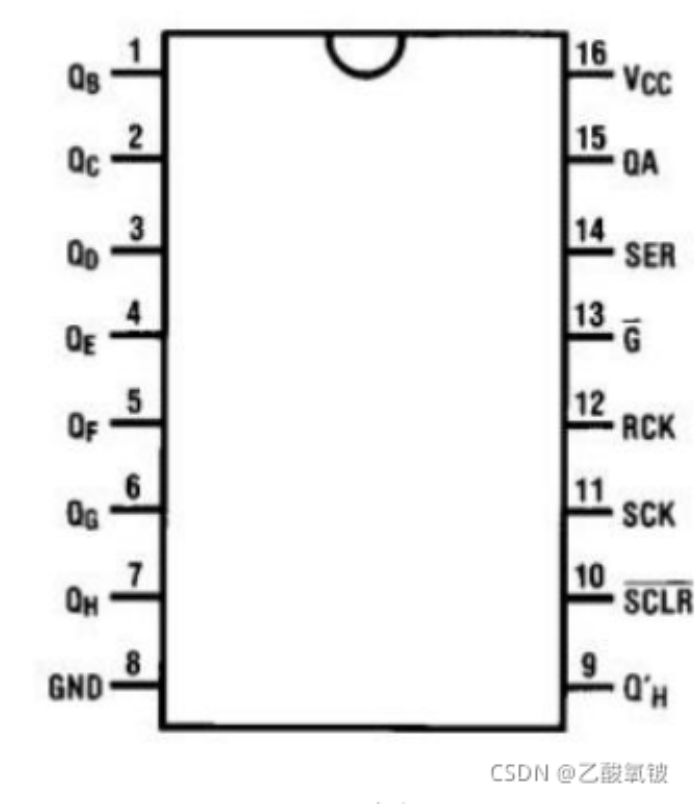
15 和 1 到 7 脚 QA–QH:并行数据输出
9 脚 QH 非:串行数据输出
10 脚 SCLK 非( MR) : 低电平复位引脚
11 脚 SCK( SHCP) : 移位寄存器时钟输入
12 脚 RCK( STCP) : 存储寄存器时钟输入
13 脚 G 非( OE) : 输出有效
14 脚 SER( DS) : 串行数据输入
74HC595 具有 8 位移位寄存器和一个存储器,三态输出功能。移位寄存器和存储器是单独的时钟。数据在 SCK 的上升沿输入,在 RCK 的上升沿进入到存 储器中。如果两个时钟连在一起,则移位寄存器总是比存储器早一个脉冲。移位寄存器有一个串行输入(DS),和一个串行输出(Q7 非),和一个异步的低电 平复位,存储寄存器有一个并行8 位、具有三态的总线输出,当 MR 为高电平,OE 为低电平时,数据在 SHCP 上升沿进入移位寄存器,在 STCP 上升沿输出到并行端口。
硬件设计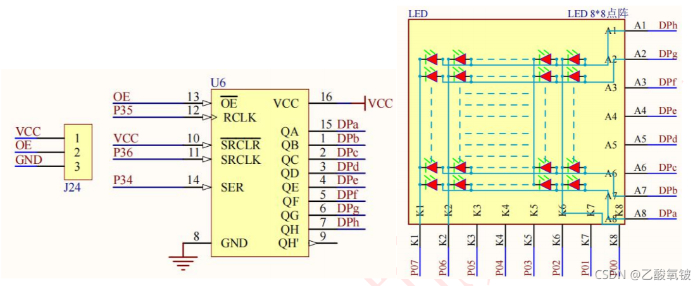
74HC595 需要用到的控制管脚 SER、RCLK、SRCLK 直接连接到 51 单片机的 P3.4~P3.6 IO 口上,输出端则是直接连接到 LED 点阵模块的行端口上,即为 LED 发光二极管的阳极,LED 点阵的列则为发光二极管的阴极。
要想控制 LED 点阵,可以将单片机管脚按照 74HC595 芯片的通信时序要求来传输数据,这样即可控制 LED 点阵的行数据。根据 LED 发光二极管导通原理,当阳极为高电平,阴极为低电平则点亮,否则熄灭。因此通过单片机 P0 口可控制点阵列,74HC595 可控制点阵行。
测试源码
修改自官方例程
stdint.h见【51单片机快速入门指南】1:基础知识和工程创建
HC74595.c
#include <REGX52.H>
#include "intrins.h"
#include "stdint.h"
#define Rows P0
uint8_t Mat[8][8] =
{
1,1,1,1,1,1,1,1,
0,1,0,0,0,0,1,0,
0,0,1,0,0,1,0,0,
0,0,0,1,1,0,0,0,
0,0,0,1,1,0,0,0,
0,0,1,0,0,1,0,0,
0,1,0,0,0,0,1,0,
1,1,1,1,1,1,1,1,
};
void HC74595_Delay() //10us @11.0592MHz
{
unsigned char i;
i = 2;
while (--i);
}
//定义74HC595控制管脚
sbit SRCLK_74595 = P3^6; //移位寄存器时钟输入
sbit RCLK_74595 = P3^5; //存储寄存器时钟输入
sbit SER_74595 = P3^4; //串行数据输入
/*******************************************************************************
* 函 数 名 : hc595_write_data(uint8_t dat)
* 函数功能 : 向74HC595写入一个字节的数据
* 输 入 : dat:数据
* 输 出 : 无
*******************************************************************************/
void hc595_write_data(uint8_t dat)
{
uint8_t i=0;
for(i=0;i<8;i++)//循环8次即可将一个字节写入寄存器中
{
SER_74595=dat>>7;//优先传输一个字节中的高位
dat<<=1;//将低位移动到高位
SRCLK_74595=0;
HC74595_Delay();
SRCLK_74595=1;
HC74595_Delay();//移位寄存器时钟上升沿将端口数据送入寄存器中
}
RCLK_74595=0;
HC74595_Delay();
RCLK_74595=1;//存储寄存器时钟上升沿将前面写入到寄存器的数据输出
}
void imshow(uint8_t mat[8][8])
{
uint8_t i, j, Row_Pix;
for(i=0; i<8; ++i)
{
hc595_write_data(0x00);//消除前面寄存器缓存数据
for(j = 0, Row_Pix = 0; j < 8; ++j)
Row_Pix |= mat[i][j] << (7-j);
Rows = ~Row_Pix;
hc595_write_data(0x80>>i);//写入新的数据
HC74595_Delay();
}
}
HC74595.h
#ifndef HC74595_H_
#define HC74595_H_
#include "stdint.h"
extern uint8_t Mat[8][8];
void hc595_write_data(uint8_t dat);
void imshow(uint8_t mat[8][8]);
#endif
main.h
#include <REGX52.H>
#include "intrins.h"
#include "stdint.h"
#include "HC74595.h"
void main(void)
{
while(1)
{
imshow(Mat);
}
}
实验现象
如图,成功将Mat中的二值图像打印在8x8的点阵屏上
SPI控制
SPI控制代码见【51单片机快速入门指南】5:软件SPI
SPI使用模式2
#include <STC89C5xRC.H>
#include "intrins.h"
#include "stdint.h"
#include "./Soft_SPI/Soft_SPI.h"
#define Rows P0
//定义74HC595控制管脚
sbit RCLK_74595_CS = P3^5; //存储寄存器时钟输入
uint8_t Mat[8][8] =
{
1,1,1,1,1,1,1,1,
0,1,0,0,0,0,1,0,
0,0,1,0,0,1,0,0,
0,0,0,1,1,0,0,0,
0,0,0,1,1,0,0,0,
0,0,1,0,0,1,0,0,
0,1,0,0,0,0,1,0,
1,1,1,1,1,1,1,1,
};
void HC74595_Delay()
{
}
/*******************************************************************************
* 函 数 名 : hc595_write_data(uint8_t dat)
* 函数功能 : 向74HC595写入一个字节的数据
* 输 入 : dat:数据
* 输 出 : 无
*******************************************************************************/
void hc595_write_data(uint8_t dat)
{
RCLK_74595_CS=0;
SOFT_SPI_RW_MODE2(dat);
RCLK_74595_CS=1;//存储寄存器时钟上升沿将前面写入到寄存器的数据输出
}
void imshow(uint8_t mat[8][8])
{
uint8_t i, j, Row_Pix;
for(i=0; i<8; ++i)
{
hc595_write_data(0x00);//消除前面寄存器缓存数据
for(j = 0, Row_Pix = 0; j < 8; ++j)
Row_Pix |= mat[i][j] << (7-j);
Rows = ~Row_Pix;
hc595_write_data(0x80>>i);//写入新的数据
HC74595_Delay();
}
}


评论(0)
您还未登录,请登录后发表或查看评论