

参考:
1.b站:豪底狄:《PID调节器》第一部分:电流环设计
2.InstaSPIN-FOC™ 和 InstaSPIN-MOTION™用户指南
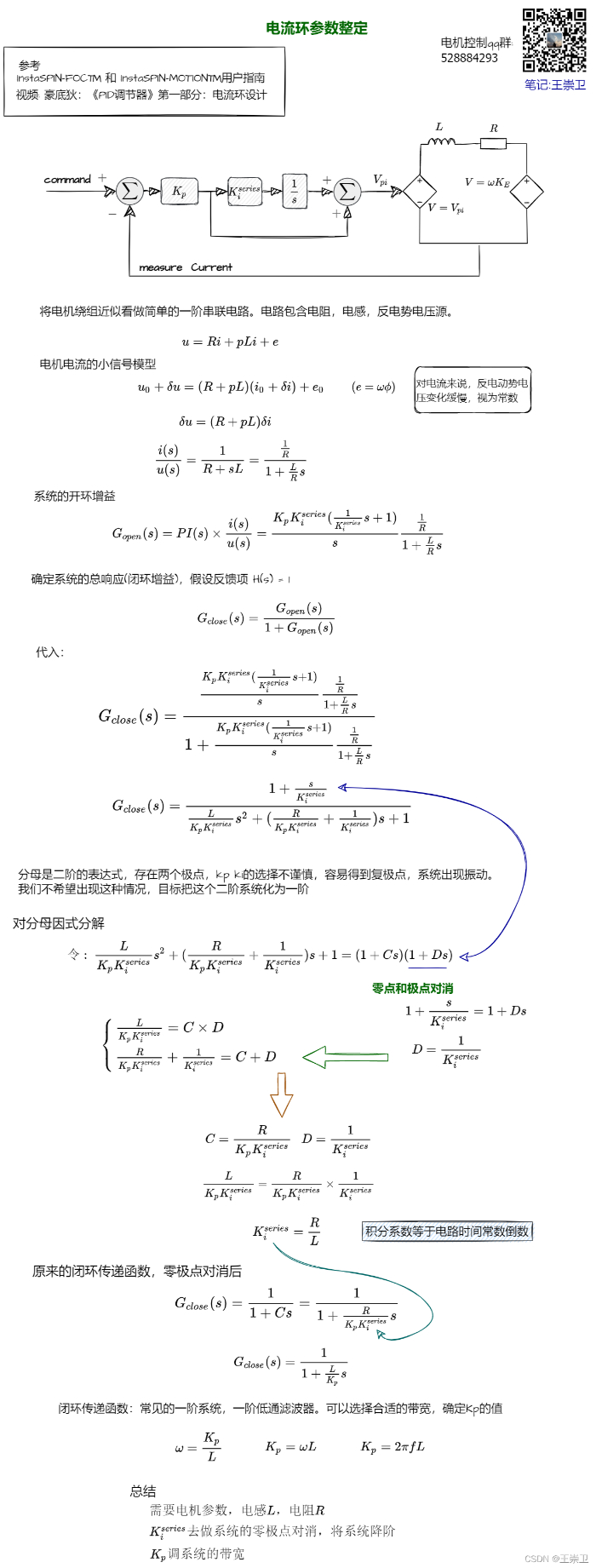
阅读TI的文档,把陈博的视频又看了一遍,自己整理抄了一遍,做了个笔记。主要是理论公式的推导,Kp,Ki的参数如何确定的。
Ki怎么零极点对消将系统降阶处理。
Kp为什么决定了电流环的带宽。
总结:
- 只需要电机参数,电感L,电阻R。
- 参数Ki为电路时间常数的导数,R/L。目的是为了零极点对消,将系统做降阶。
- Kp调电流环的带宽。
串联和并联拓扑PI控制器
[动态系统的建模与分析]15_伯德图,bode图,为什么是20logM?分贝又是什么?
[动态系统的建模与分析]16_伯德图_手绘技巧
")


评论(0)
您还未登录,请登录后发表或查看评论