需要用到USBtiny下载器和下载工具,USBtiny下载器如下所示:下载工具在如下链接:https://download.csdn.net/download/weixin_36815313/11245570 第一步:烧录16U2固件 16U2固件推荐选用Arduino\avr\firmwares\atmegaxxu2\arduino-usbserial\Arduino-usbserial-a
作者@阿利同学,邮箱:1309399183@qq.com 本文完全采用公式去搭建模型,而不是拖拽模块,有利于加深对公示的理解,提升对simulink的建模水平。 1.PMSM(永磁同步电机)建模 根据电机的转矩、电压电流关系公式进行搭建。纯数学公式搭建PMSM本体。 2.SVPWM(矢量脉宽调制技术)的搭建 上图为封装好的SVPWM模型。这里面有两个输入参数,分别为电压Ud,和调制时间T
这个章节主要讲解: 图像特征提取; 多幅图像匹配特征点; 对极几何; PNP问题; ICP问题; 三角化原理; 一. 特征点提取和匹配 工程实践需要你事先安装了opencv3; 由于opencv3中提供了由本质矩阵E 恢复R,t的接口。 opencv2和opencv3提取特征点时有些语法写法不太一样~ 用CLion打开slambook2-master的ch7工程; 其中旧
内容列表 1. 一阶RC低通滤波器的连续域数学模型 1.1 数学模型的推导 1.2 频率特性 1.3 物理作用 2. 一阶RC低通滤波器的算法推导 2.1 离散化 2.2 滤波系数 3. 一阶RC低通滤波器的C语言实现 4. 缺点及改善方法 4.1 缺点 4.2 改善方法——动态调整滤波系数 4.2.1 实现功能 4.2.2 调整前
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的。鉴于本人手头积累了一些传感器和各种模块,依照实践(动手试试)出真知的理念,以学习和交流为目的,这里准备逐一做做小实验,不管能否成功,都会记录下来---小小的进步或是搞不掂的问题,希望能够抛砖引玉。能把各种开源硬件的传感器与模块,尽量多寻找一下实物,整理相关资料,做做小实验,是我多年来的一个心愿。目
hdl_graph_slam是一套激光slam系统,可融合gps、imu、lidar三种传感器,同时具有闭环检测功能。开源代码地址为: hdl_graph_slam激光雷达建图系统github.com/koide3/hdl_graph_slam 一、优缺点分析 通过实测和阅读代码,它有如下优缺点:1. 优点 1)简洁的流程和代码结构。 激光slam虽然相对简单,但是目前开源的算法里,能
系列目录 STM32 HAL库快速实战【一】《32点灯》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu STM32 HAL库快速实战【三】《pwm控制舵机》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu STM32 HAL库快速实战【四】《串口简单使用》--基于黑龙江科技大学机电工业机器人实训- USTHzhanglu STM32 HA
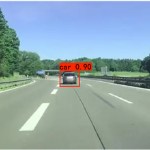
简介 下载地址:https://pan.baidu.com/s/11GJe4MdM_NH6fuENCQ2MtQ 提取码:019b 官方网站:https://www.flir.com/oem/adas/adas-dataset-form/ YOLOV3训练代码:https://github.com/enesozi/object-detection 该数据集提供了带注释的热成像数据
实验二十三:步进电机 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。你可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时你也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 下面这个就是本次实验使用的步进电机使用步进电机前一定要仔细查看说明书,确认是四相还
移动机器人ROS架构分析 1.1小海龟仿真 ROS的核心概念不少,有节点、话题、消息、服务等,在实际机器人运行过程中,这些概念是如何体现的呢? 我们先来运行ROS系统一个经典的例程——小海龟。 请大家按照以下步骤进行操作。 1.首先,打开终端; 2.输入以下命令行,启动ROS Master: $ roscore 3.启动成功后,打开一个新终端,输入以下命令行,启动小海龟仿真器,启动
单目3D室内检测 接下来,我们继续学习物体 3D 检测算法。 机器人有时候不仅仅要识别出人,还要识别出房间里有什么东西,这就是室内物体 3D 检测啦。 在TogetherROS上,就集成了这样一套算法,接下来让我们一起来体验以下吧。 先来看一张图片,很明显大家可以看到图中有两个垃圾桶。 运行示例程序 # 配置ROS2环境 $ source /opt/tros/setup.bash
雷达驱动与可视化 Hint 操作环境及软硬件配置如下: OriginBot机器人(导航版) PC:Ubuntu (≥20.04) + ROS2 (≥Foxy) 雷达驱动 SSH连接OriginBot成功后,在终端中输入如下指令,即可启动机器人底盘及雷达驱动: $ ros2 launch originbot_bringup originbot.launch.py
PS2摇杆 PS2 摇杆一般可以用来控制小车等等,其构造主要就是两个10K 的电位器,还有一个按键开关。五个端口分别为VCC,X,Button,Y,GND。 实验接线图 以下为参考程序代码: #include <LiquidCrystal.h> //调用arduino 自带的LiquidCrystal 库 LiquidCrystal lcd(12, 11, 10, 9
前言 在使用 dpkg -i 安装.deb软件包的过程中,会出现安装失败的可能。之后无论用 sudo apt install -f or sud apt autoremove 等常见的修复命令都是无效的。网络上很多解决方案都直接给出需要运行的命令,不分析原因也不说明理由。我从来不尝试这样的解决方案,除非我自己知道或是只能死马当活马医。 不过针对Sub-process /usr/bin/dpkg
官方文档:imshow、namedWindow等本来想看看imshow的窗口是否可以隐藏菜单栏,看完官方文档感觉是不可以了。 imshow imshow的输入参数如下: void cv::imshow ( const String & winname, InputArray mat ) Python: None = cv.imshow( winname, mat )
摘要 STM32;HAL库;SPI;TDC-GP22; SPI 配置 注意事项 TDC-GP22只支持以下 SPI 模式:Clock Phase Bit = 1Clock Polarity Bit = 0 在3.0V时,TDC clk最大为20MHZ,因此时钟频率要限制在20MHZ以下。SPI2挂载在APB1下,最大时钟为42/2 = 21MHZ,分频选择64即可。 TDC - GP2
#include <Servo.h> const int trigPin = 10; const int echoPin = 11; long duration; int distance; Servo myServo; // Creates a servo object for controlling the servo motor void setup() { p
系列目录 点击查看目录 模块介绍 引脚 作用 VCC 电源,3.3-5V Trig (Trigger) 触发超声波脉冲 Echo 回声当接收到反射信号时,引脚产生一个脉冲。脉冲的长度与检测发射信号所需的时间成正比。 GND 接地 (1)超声波测距原理1)超声波测距原理是在超声波发射装置发出
这是我的推广信息,以激励自己更好的分享自己的知识和经验!也希望看到的你能够多多支持,谢谢! 1. 滴滴云AI大师: 目前滴滴云正在大力推广自己的云计算服务,需要购买的朋友们用我的AI大师码 「2049」在滴滴云上购买 GPU / vGPU / 机器学习产品可额外享受 9 折优惠,点击这里前往滴滴云官网。 原文地址:Improving massively imbalanced
第三方账号登入
看不清?点击更换
























第三方账号登入
QQ 微博 微信