

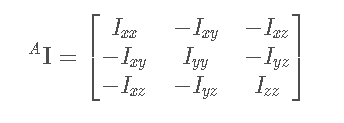
 矩阵中各元素为:
矩阵中各元素为:
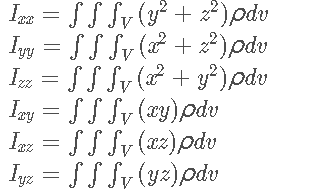 式中刚体由单元体dv组成,单元体密度为ρ,每个单元体的位置由矢量
式中刚体由单元体dv组成,单元体密度为ρ,每个单元体的位置由矢量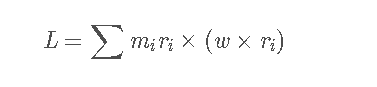 将上式展开写成矩阵的形式是:
将上式展开写成矩阵的形式是:
 右侧3×3矩阵中的求和形式与第一部分中的积分形式是等价的。L i表示刚体绕定点旋转时对每个分坐标轴的动量矩。
参考文献:
John Craig 《机器人学导论》 机械工业出版社 2006
洪国维 《惯性张量的物理意义》
矩阵中各元素为:
式中刚体由单元体dv组成,单元体密度为ρ,每个单元体的位置由矢量
将上式展开写成矩阵的形式是:
右侧3×3矩阵中的求和形式与第一部分中的积分形式是等价的。L i表示刚体绕定点旋转时对每个分坐标轴的动量矩。
参考文献:
John Craig 《机器人学导论》 机械工业出版社 2006
洪国维 《惯性张量的物理意义》
右侧3×3矩阵中的求和形式与第一部分中的积分形式是等价的。L i表示刚体绕定点旋转时对每个分坐标轴的动量矩。
参考文献:
John Craig 《机器人学导论》 机械工业出版社 2006
洪国维 《惯性张量的物理意义》
矩阵中各元素为:
式中刚体由单元体dv组成,单元体密度为ρ,每个单元体的位置由矢量
将上式展开写成矩阵的形式是:
右侧3×3矩阵中的求和形式与第一部分中的积分形式是等价的。L i表示刚体绕定点旋转时对每个分坐标轴的动量矩。
参考文献:
John Craig 《机器人学导论》 机械工业出版社 2006
洪国维 《惯性张量的物理意义》 
您当前积分:0

评论(0)
您还未登录,请登录后发表或查看评论