

四、轨迹规划模块
轨迹规划部分分为关节空间的轨迹规划和笛卡尔空间的轨迹规划,在这里,我们主要讲解关节空间的轨迹规划部分。
关于关节空间轨迹规划部分,我们主要是将关节的转动的轨迹,规划为一条平滑的曲线,做到初始速度为0,加速度为0,莫位置速度为0,加速度为0等条件,曲线规划方法(曲线)各种各样,在这里,我们选择三次多项式的曲线规划方法。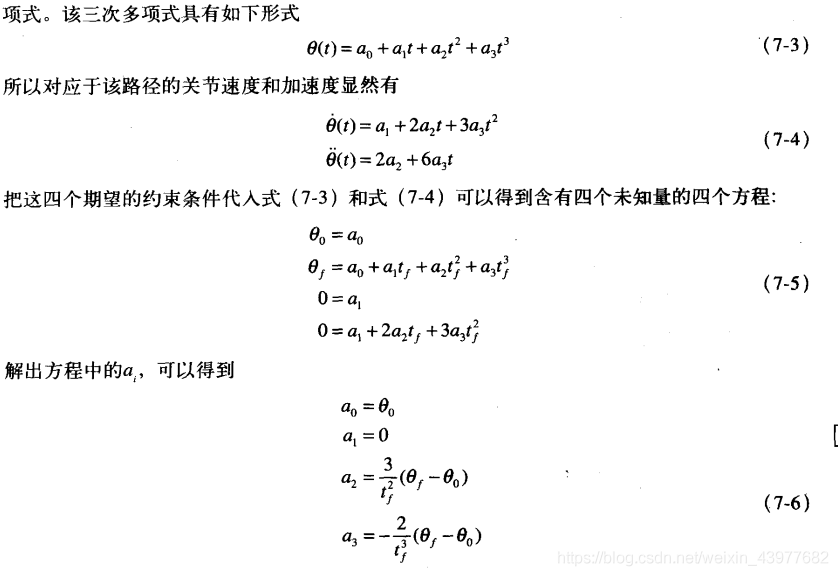
已知初位置、末位置和运行时间,就可以把该曲线表达出来。
轨迹规划模块的创建方法可以参照:
https://blog.csdn.net/weixin_43977682/article/details/105816324
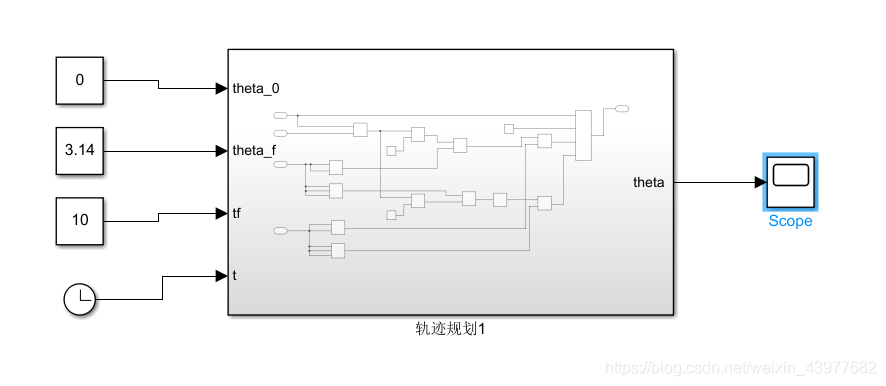
下面是创建结果:
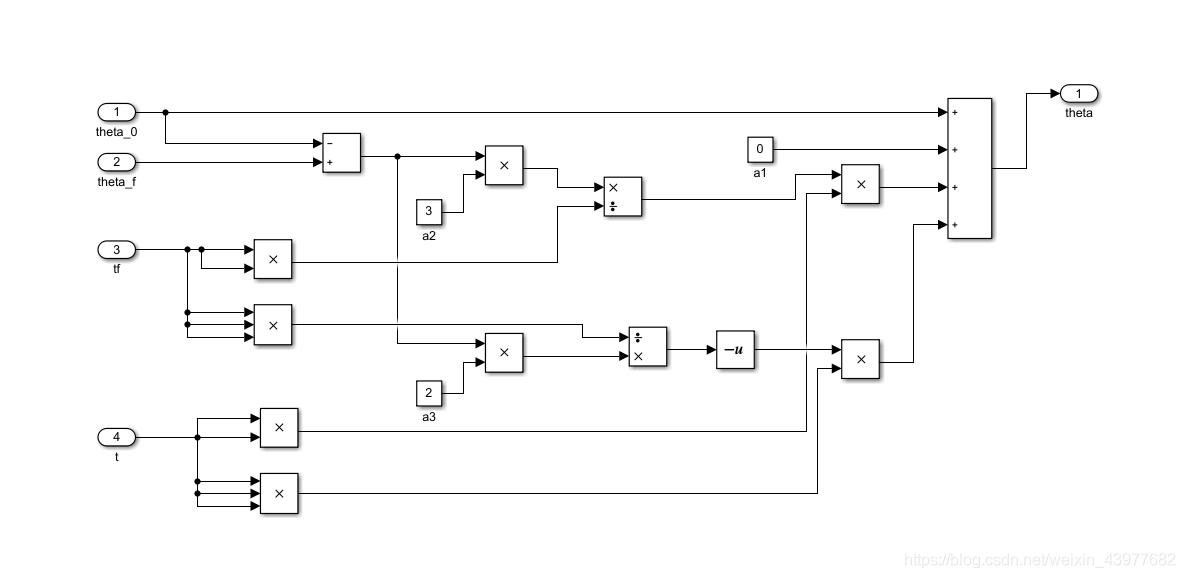
其中t为时间变量。
现在,我们来验证轨迹规划模块的正确性:
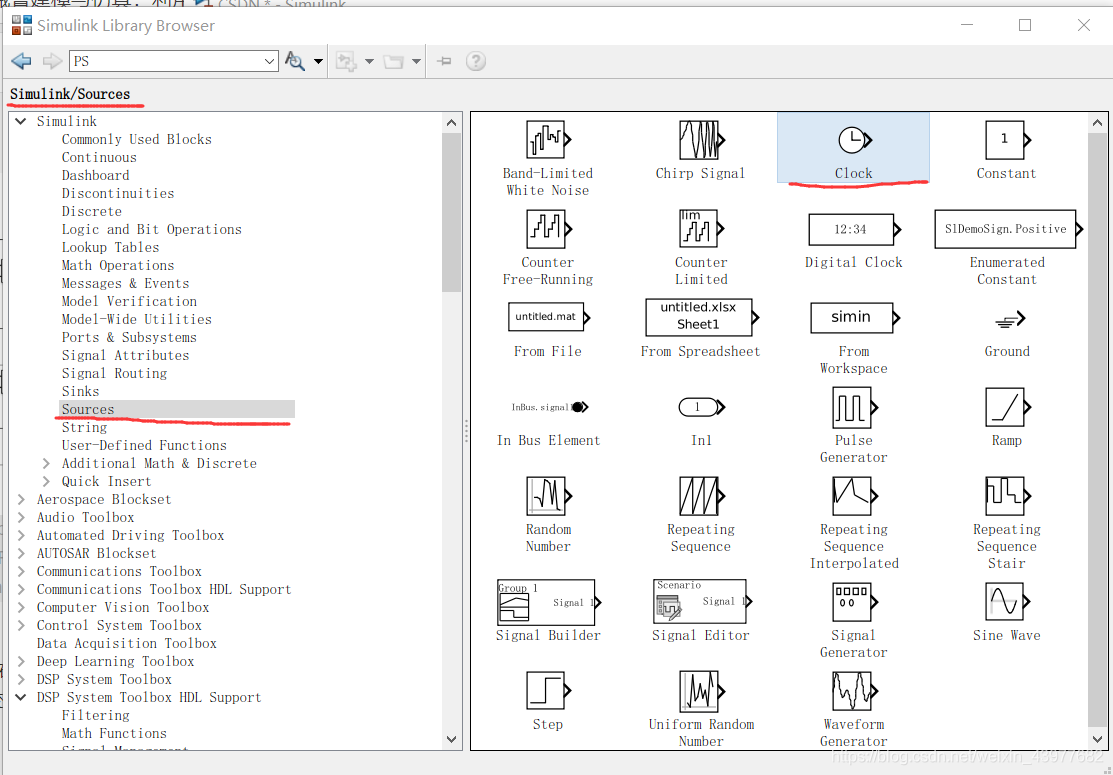
我们先需要clock时钟模块提供时间变量t,可以将当前的时间作为输出量:
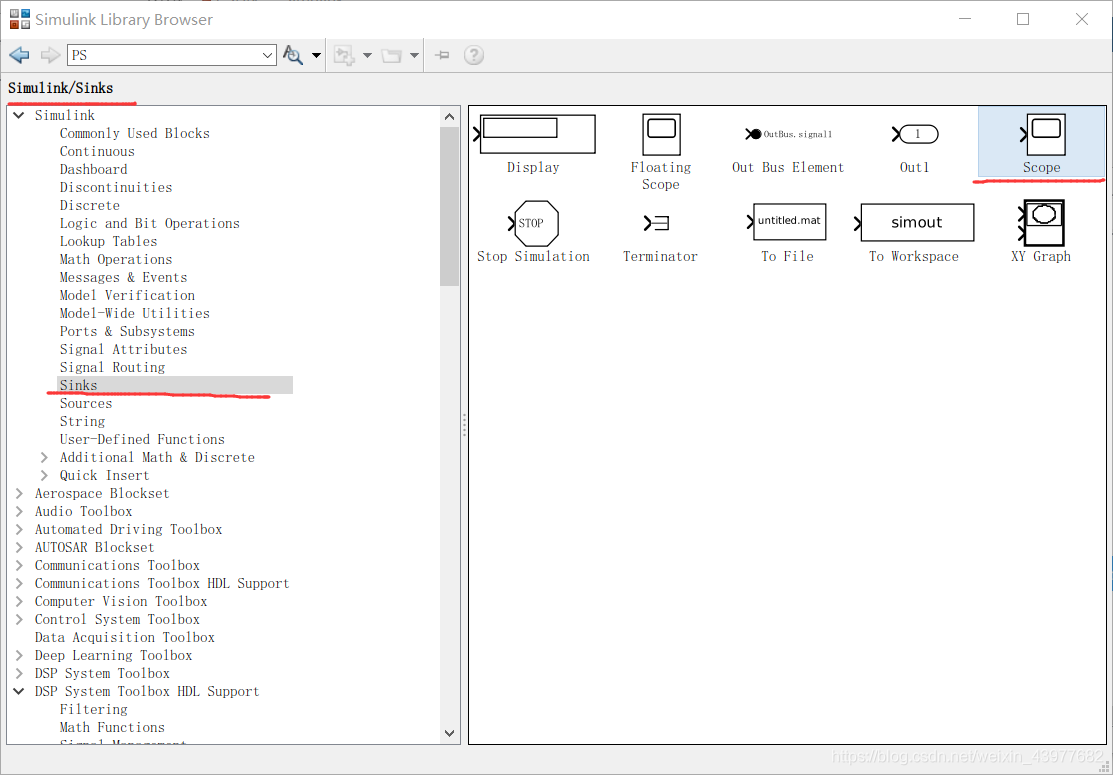
然后需要scope模块将输入量随时间变化的轨迹表达出来:
连线如图所示:
双击scope模块,再点击运行按钮:
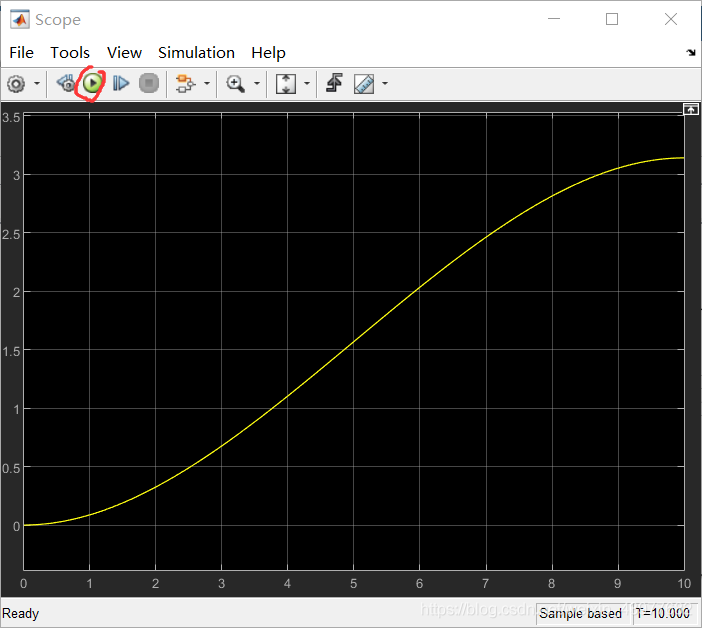
可以看到平滑的曲线已经生成,说明模块没有问题!
将逆运动学模块和轨迹规划模块,关节控制模块结合。其他模块的使用可以查看前几章节的内容。
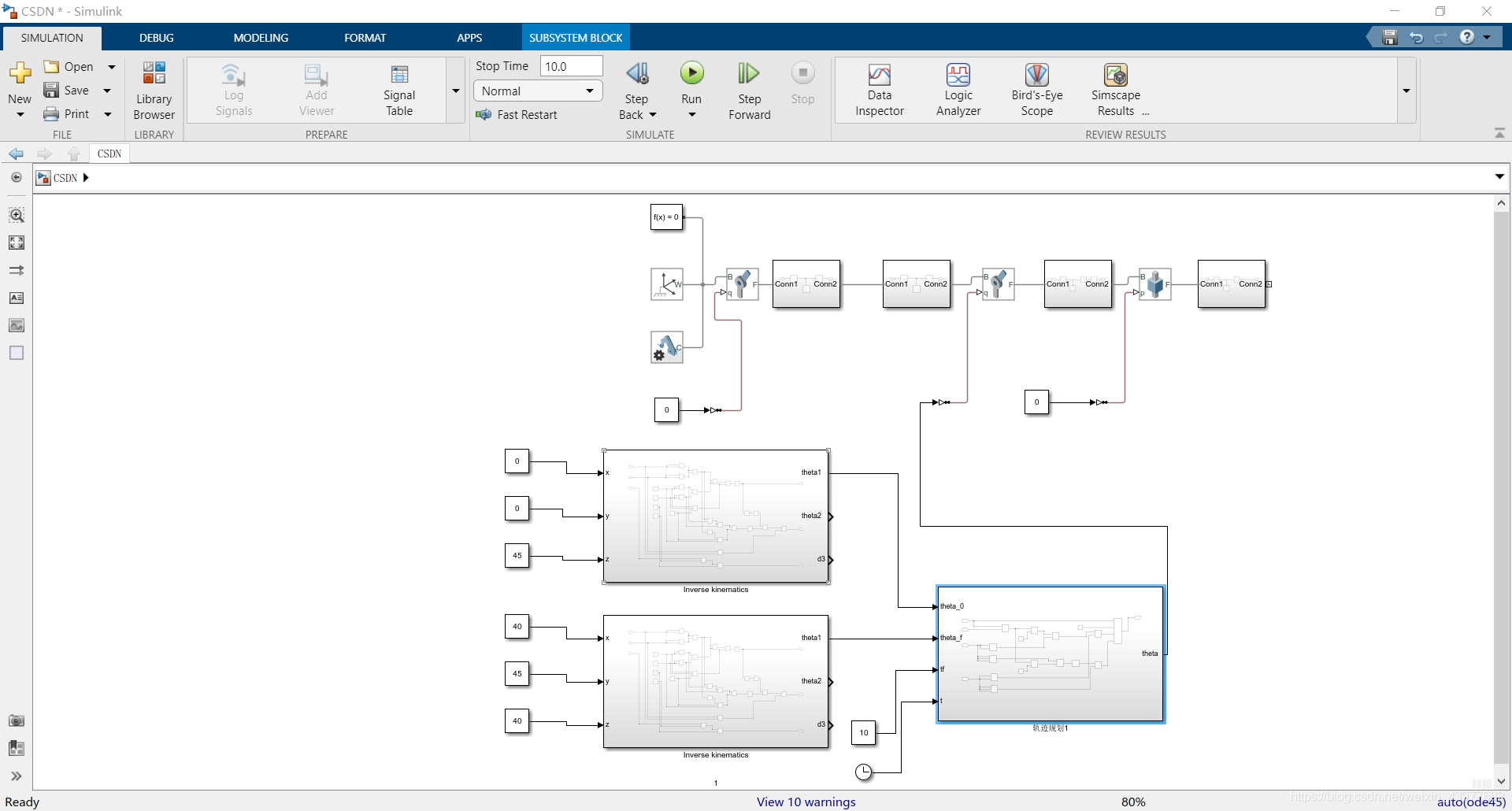
点击运行,即可看到机械臂在缓慢的转动,10s,达到目标点。同样的方法,每个关节添加一个轨迹规划模块,即可完成对每个关节的控制,这部分,这里就不再多加描述。




评论(0)
您还未登录,请登录后发表或查看评论