

二、正逆运动学模块的搭建
提示:关于逆运动学的求解方法,本章节不做重点介绍,可以参考一下文章学习求逆解的方法,本章主要讲解如何利用SimMechanics搭建正逆运动学模型,并仿真、验证!
https://www.cnblogs.com/21207-iHome/p/9452896.html
1.正、逆运动学的表达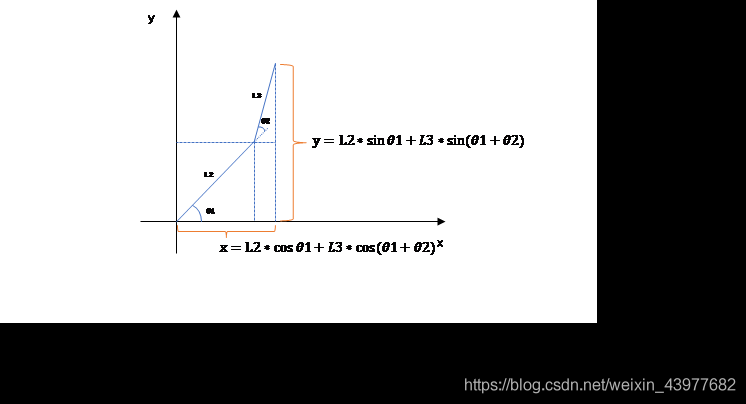
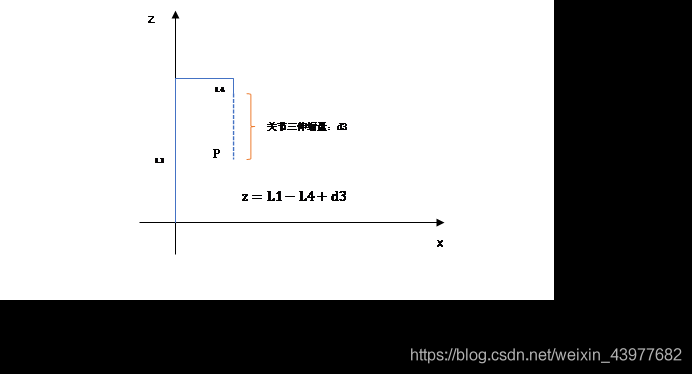
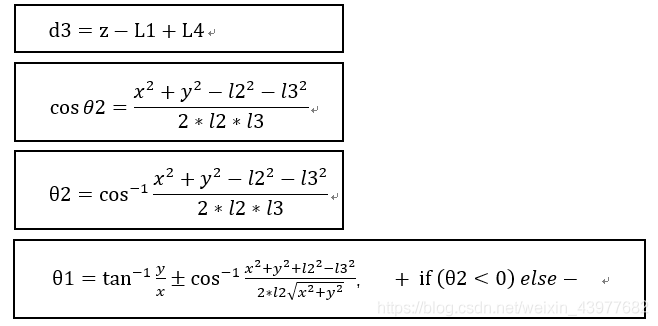
2.Simulink中,相关的数学计算模块。
复杂的表达式是通过简单的四则运算(加减乘除)表达出来的,同样,在Matlab的Simulink中,定义好输出输出端口,通过若干个加减乘除模块组合,来表达出复杂的表达式。 我们主要用到的模块有: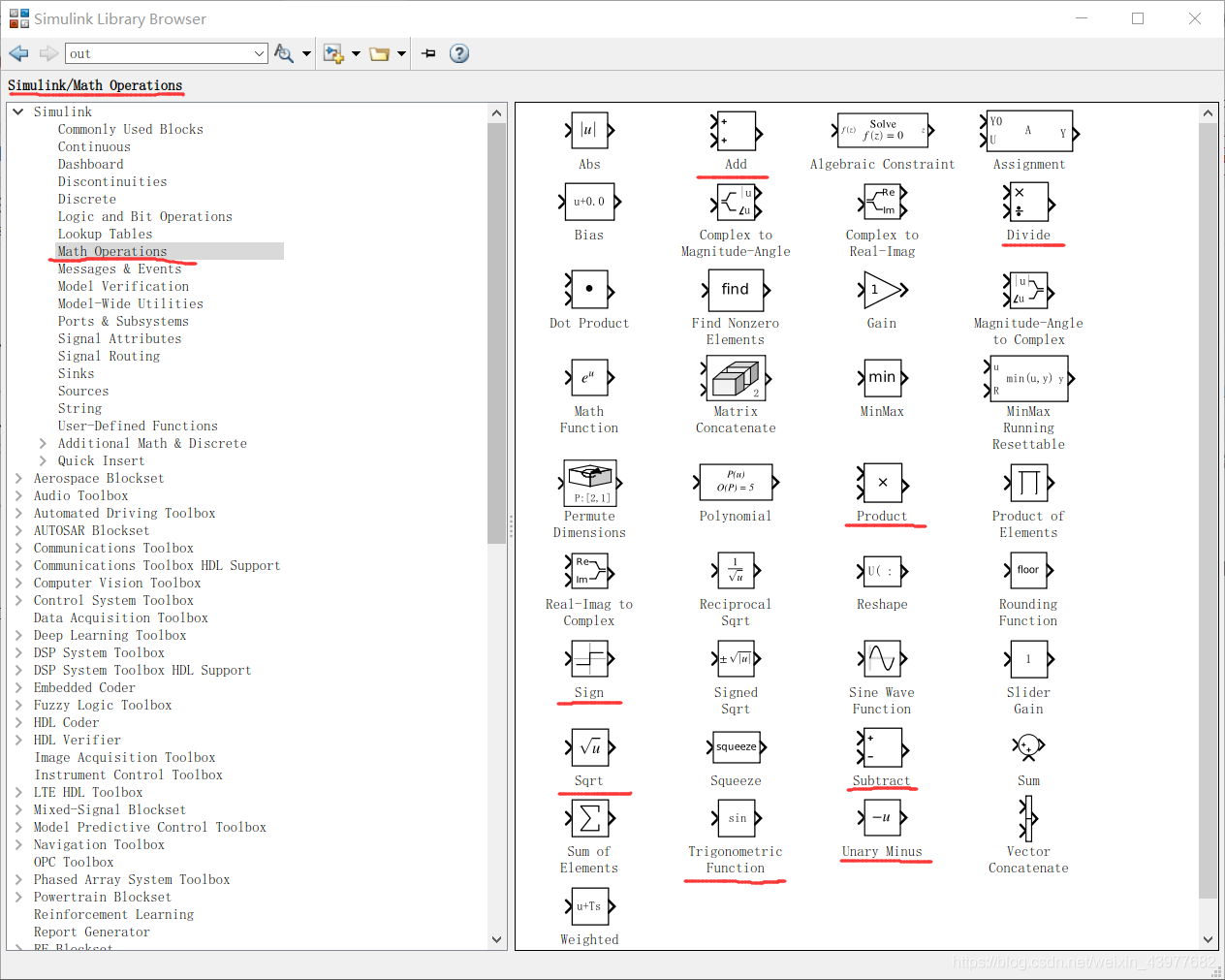
模块的作用,就如同他的名字所表达的意思,不多做介绍。(可以自定义模块的输入端口数量,比如Add,可以做到同时多个输入相加!),在Trigonometric Function中,可以自定义你所需要的三角函数,包括反三角函数。
3.封装子系统
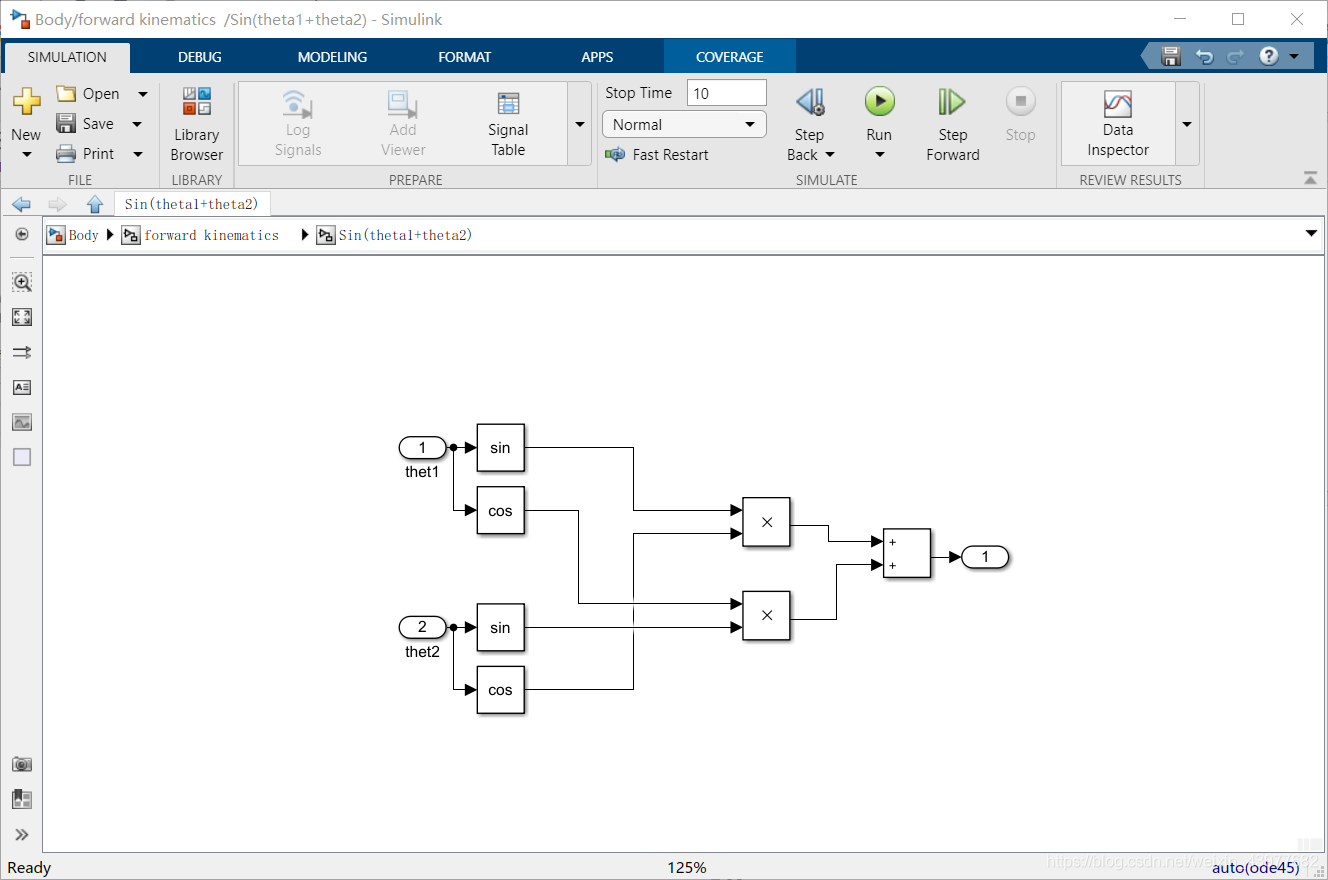
正逆运动学本身就可作为一个子系统存在,但在搭建过程中,例如cos(θ1+θ2),往往需要展开计算,我们可以将这样子函数再次封装为一个子系统,降低整个系统的复杂度,提高整洁度。
搭建的cos(θ1+θ2)和sin(θ1+θ2)如图所示: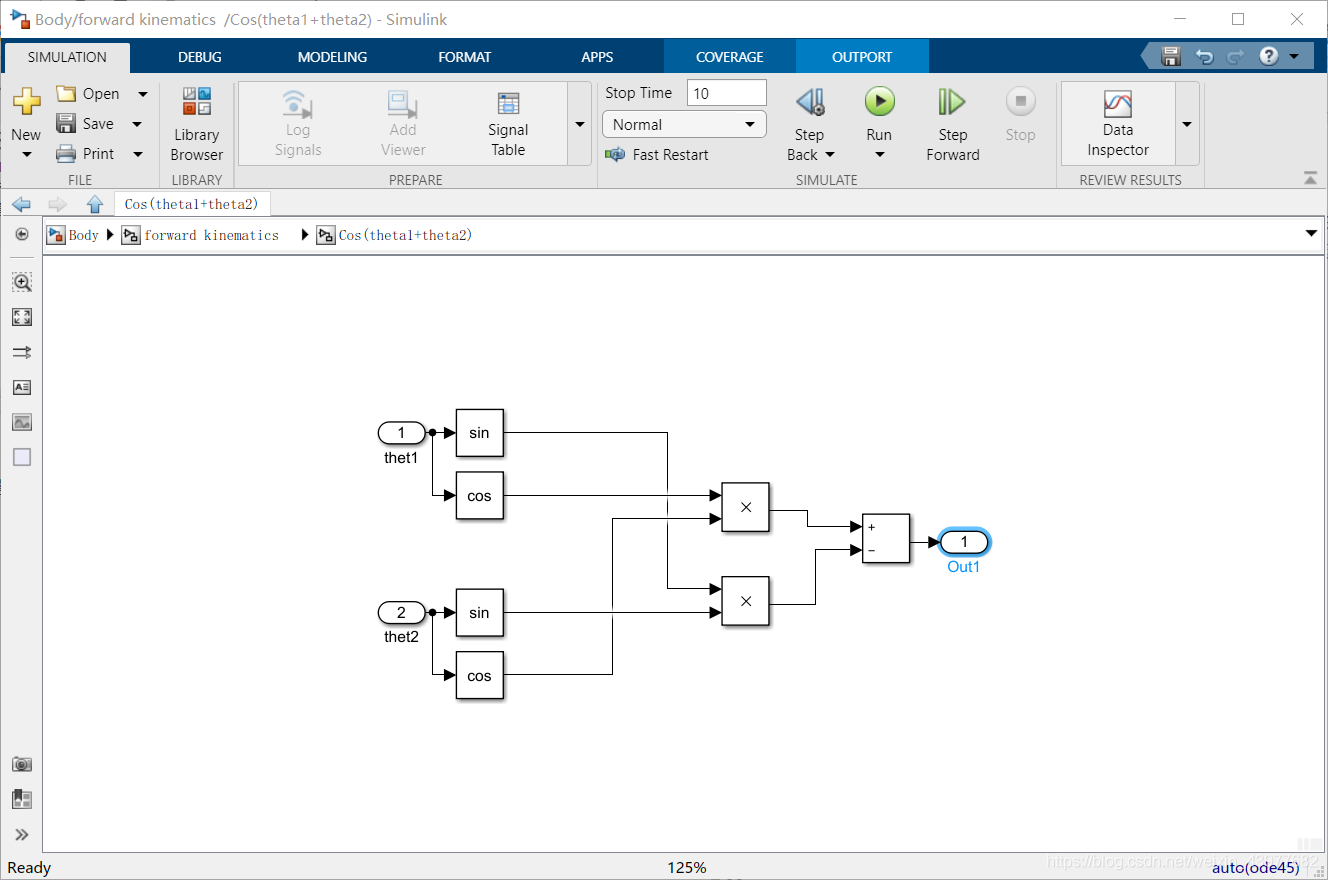
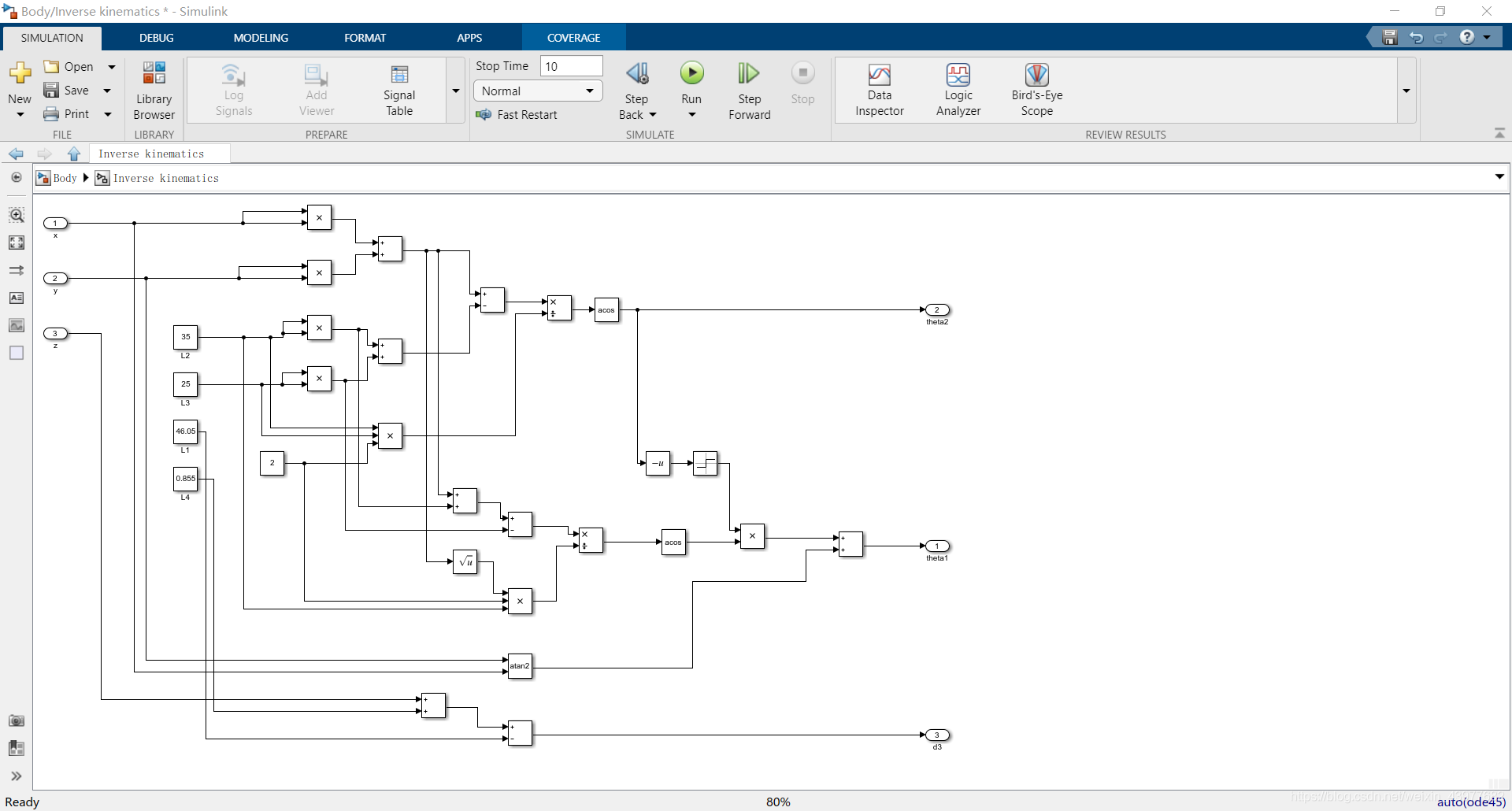
4.搭建正运动学系统,根据之前求出的表达式,一步一步分解搭建即可:
注意:根据DH参数表,下图中的L4应为8.55。
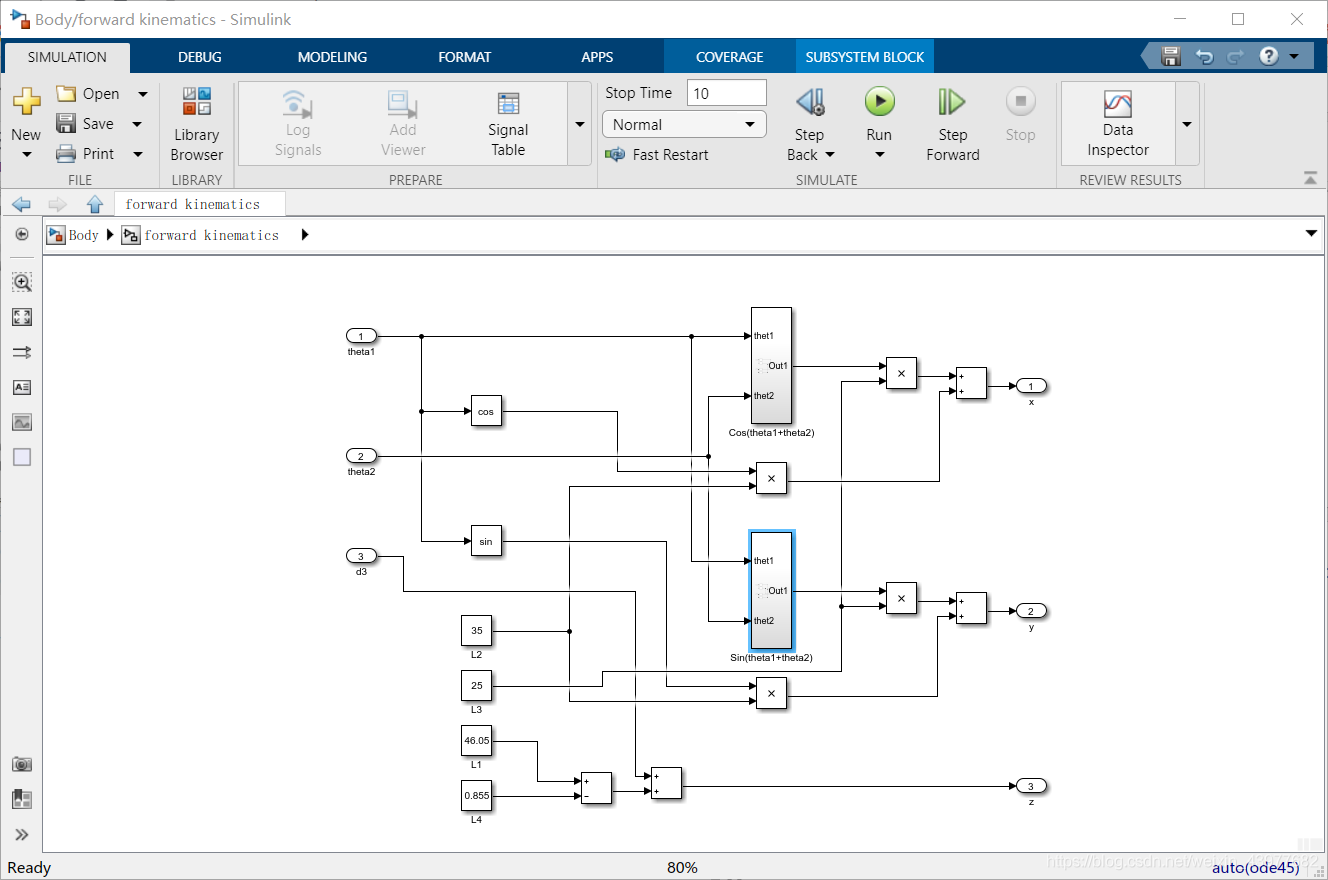
注意:根据DH参数表,下图中的L4应为8.55。
5.系统的仿真并验证
即输入一组[x,y,z]坐标,通过逆运动学求解得到[theta1,theta2,d3],再将逆运动学得到的结果作为正运动学的输入量,查看正运动学的输出量是否等于一开始自定义的坐标。
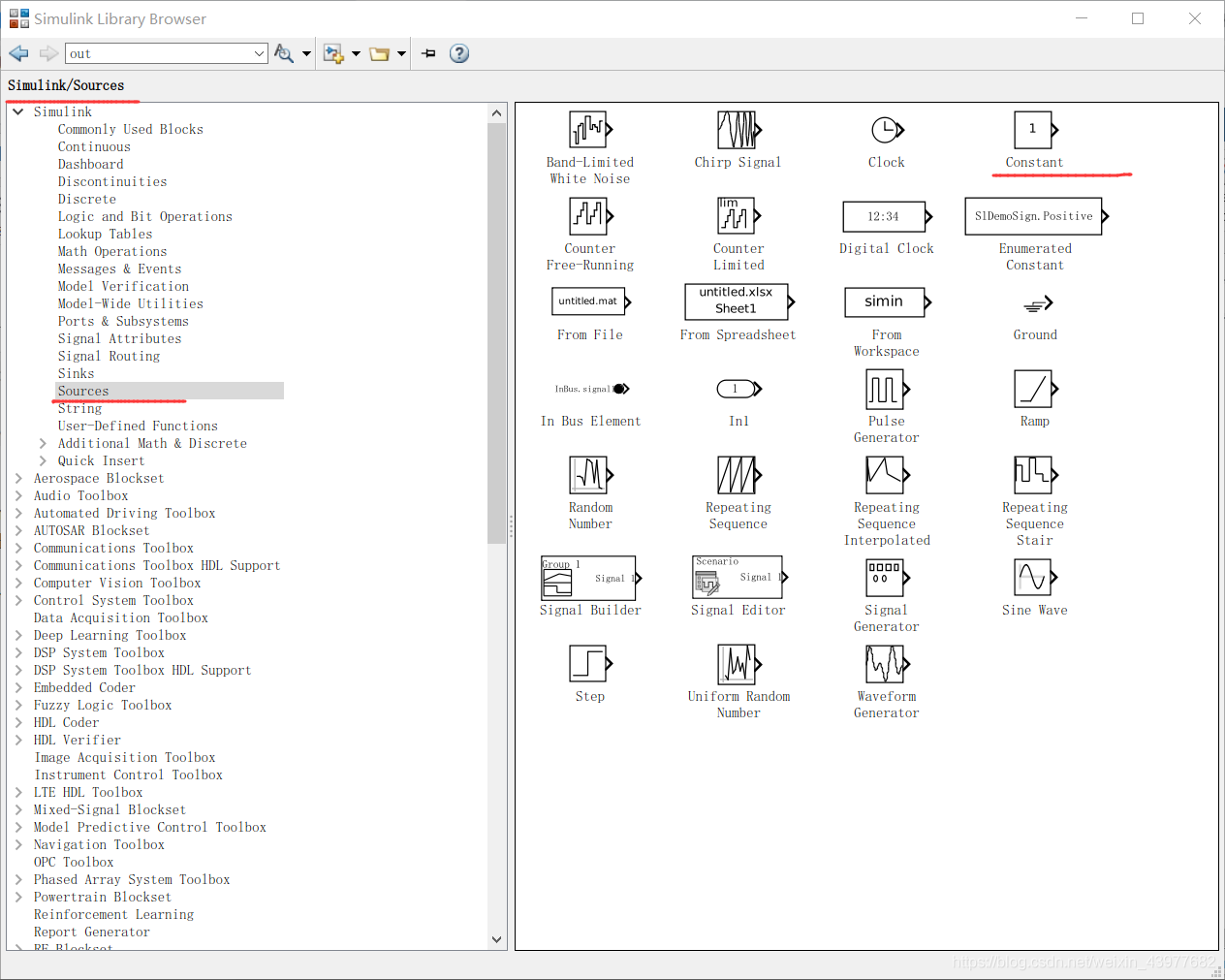
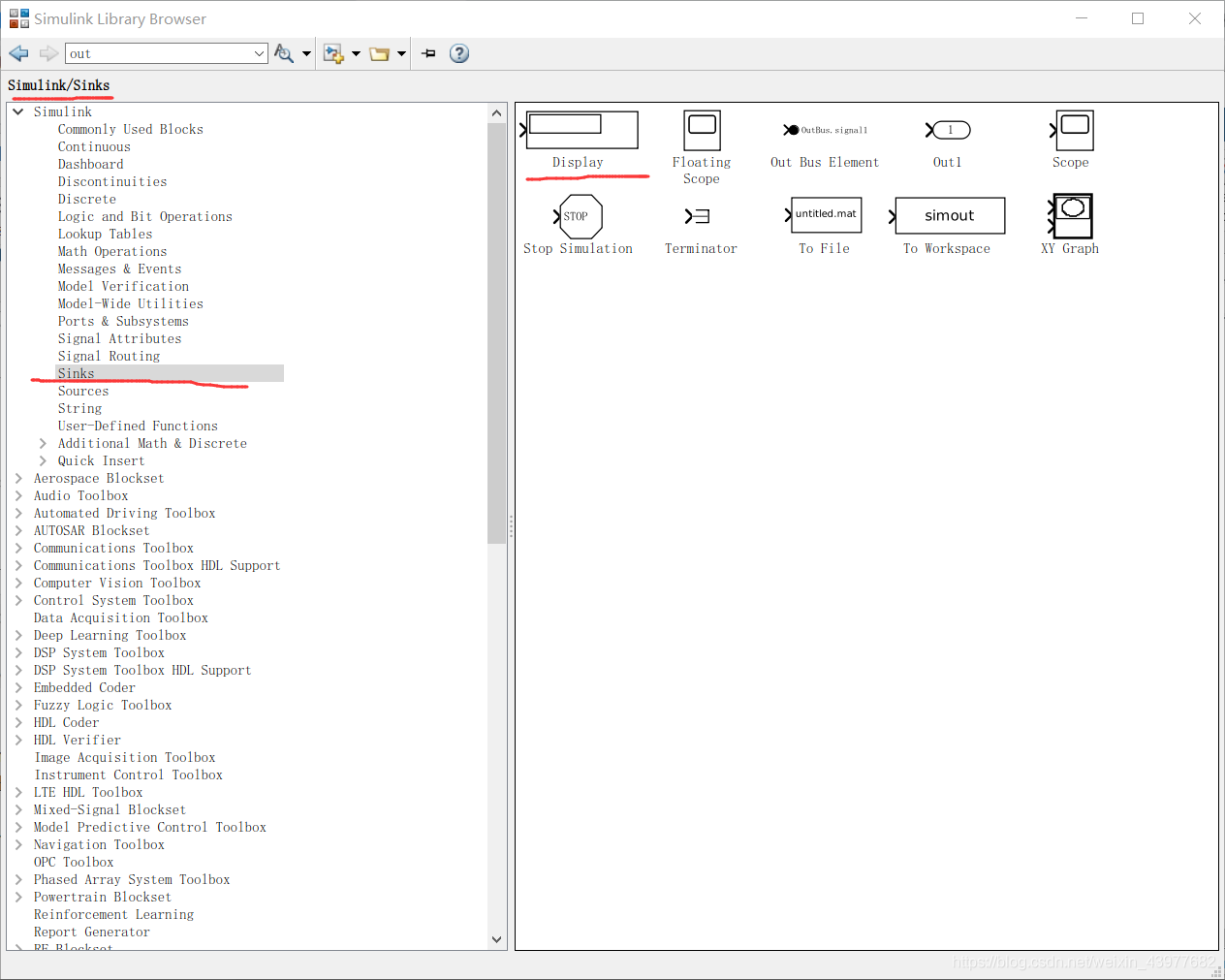
输入量,我们可以用constant模块,可自定义一个常量值作为输出,输出的表示我们用Display模块,可以将输入量直接显示出来。
如图所示,结果一致。(由于反三角函数的输出值为弧度制,我们在采用逆运动学的输出结果时,忽略了部分小数,导致结果有很小的误差,但是基本一致,说明系统搭建没有问题。)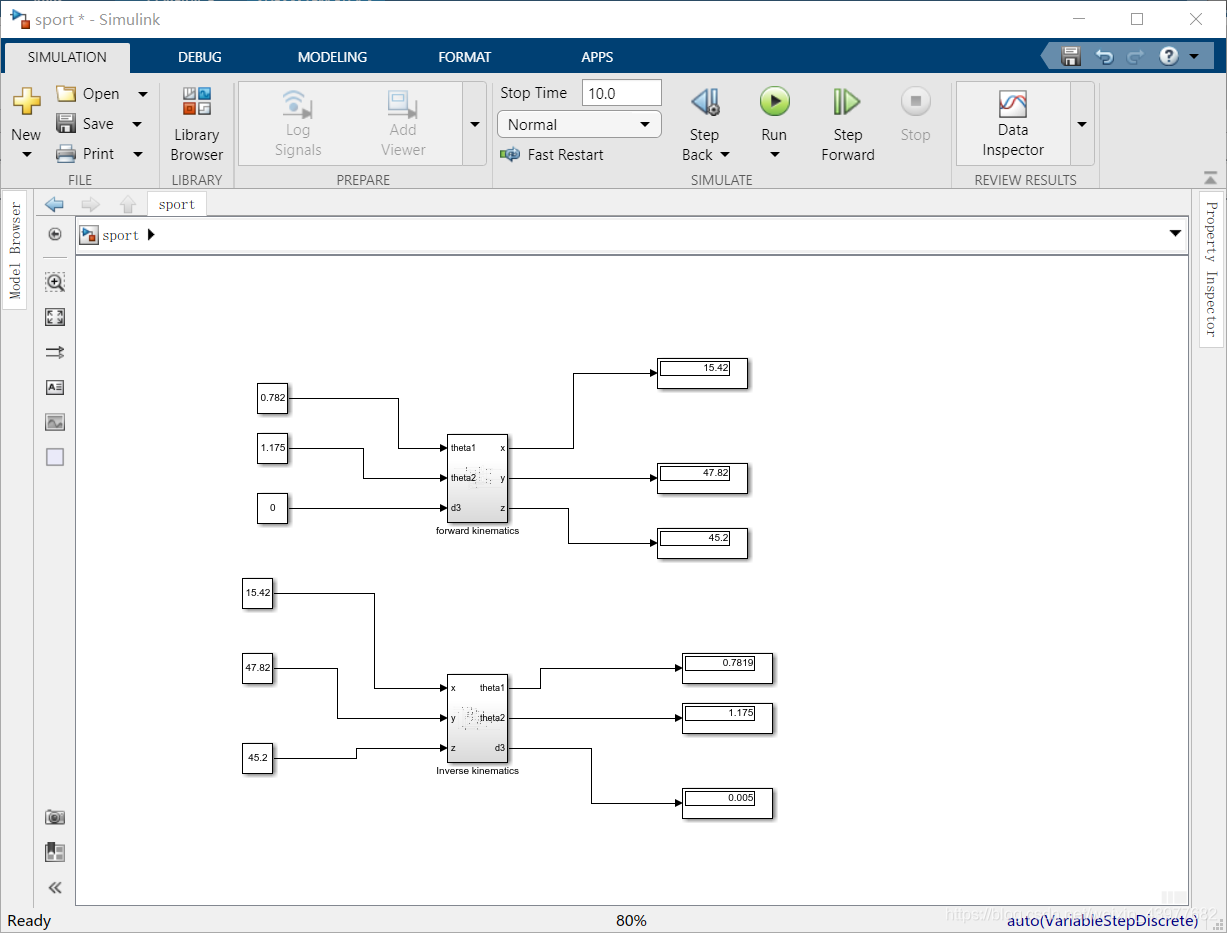




评论(0)
您还未登录,请登录后发表或查看评论