

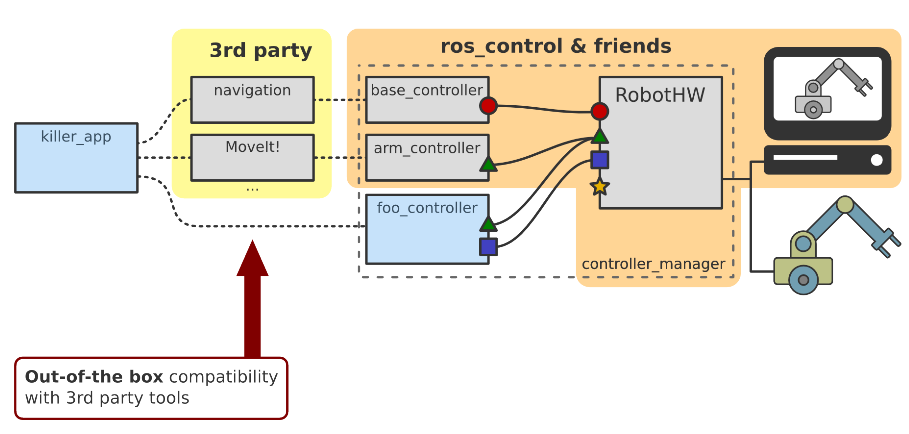
在上一篇中介绍了ros_control的两个应用,但是还没结束,因为规划问题是一个很重要,而且也很有挑战性的问题。好在ROS里提供了一些规划的接口,比如主要用于机械臂规划的MoveIt,其实它也可以用于规划底座,这个只是在Moveit的一个PPT里看见过,是用于PR2的,其他的好像没看见过。这里主要是将上篇的7自由度手臂结合ros_control与Moveit。
1. 关于Moveit的配置
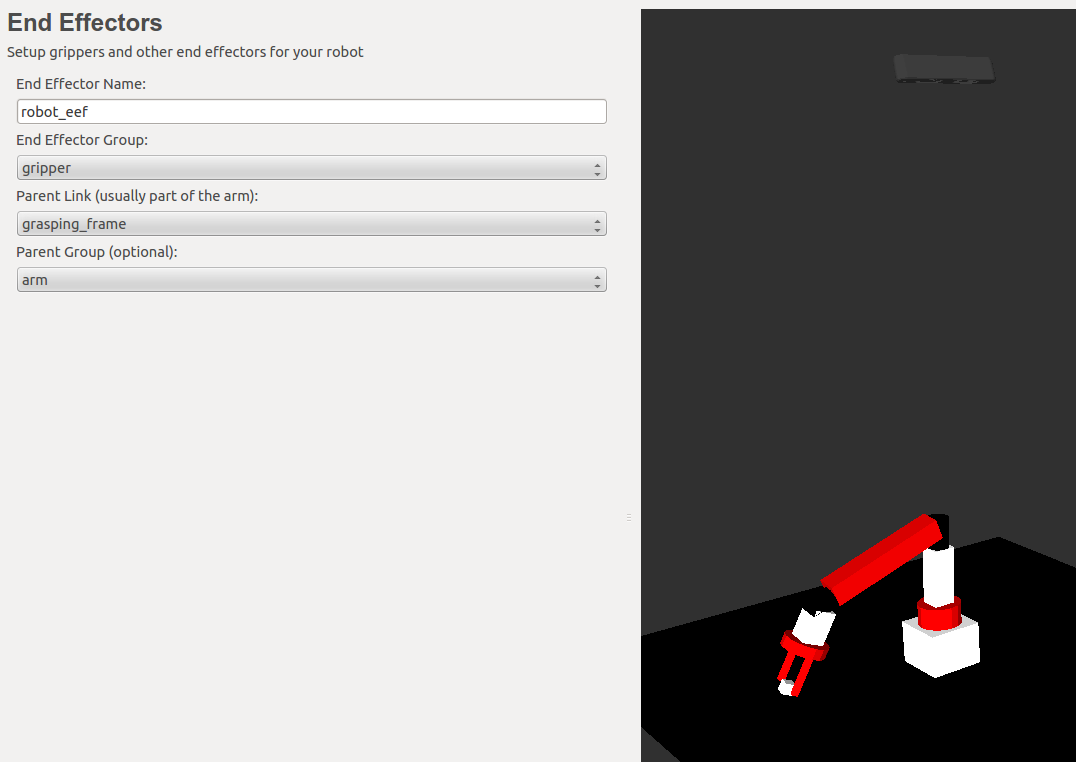
我就不多讲,给出几个关键地方的截图
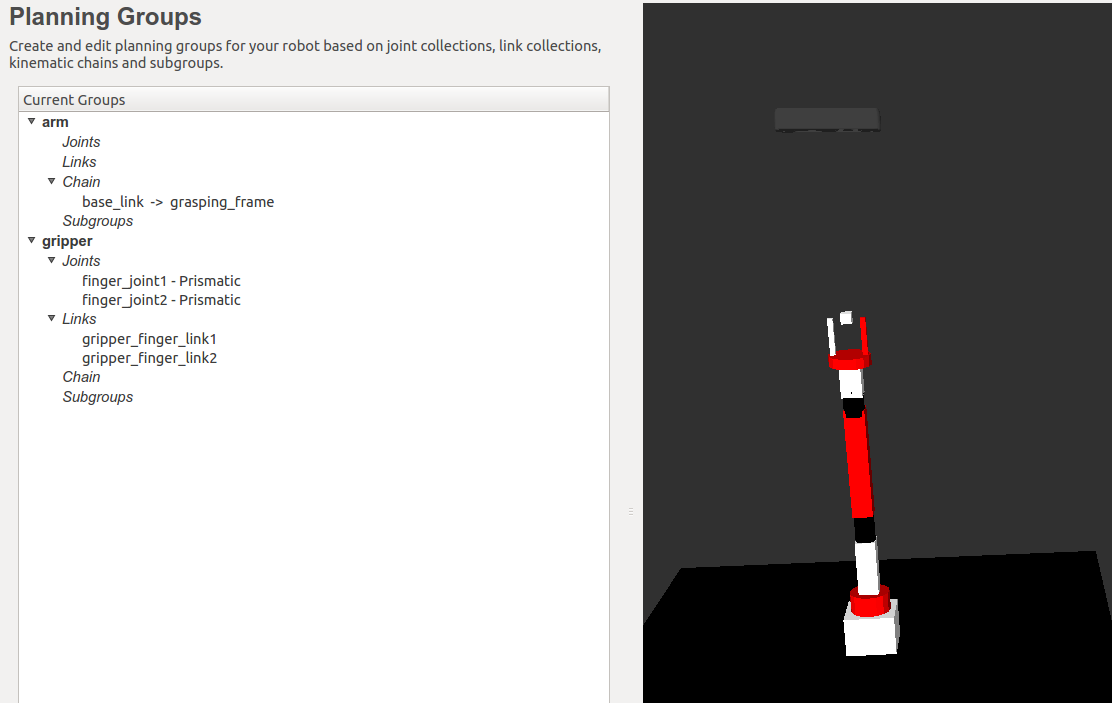
这里的Planning Group比较特别,它的手臂是用的Chain,从base_link到两个夹子中间的grasping_frame
而夹子的那个Group是没有选择KDL求解器的。
这里我感觉对我自己的youBot很有启发,因为我也有一个grasp_frame设在了夹子之间。

2. 配置controller.yaml文件和controller_manager.launch.xml文件
前面那个文件在config文件夹下建立,ros by example上面有详细说明。后面那一个在launch文件夹直接修改。目的是为MoveIt的controller添加配置,因为Moveit的规划完的结果一般是不能直接给到机器人上的,通过action接口作为一个桥梁。
controller.yaml文件如下
controller_manager_ns: controller_manager
controller_list:
- name: seven_dof_arm/seven_dof_arm_joint_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- shoulder_pan_joint
- shoulder_pitch_joint
- elbow_roll_joint
- elbow_pitch_joint
- wrist_roll_joint
- wrist_pitch_joint
- gripper_roll_joint
- name: seven_dof_arm/gripper_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- finger_joint1
- finger_joint2<launch>
<!-- Set the param that trajectory_execution_manager needs to find the controller plugin -->
<arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" />
<param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/>
<!-- load controller_list -->
<arg name="use_controller_manager" default="true" />
<param name="use_controller_manager" value="$(arg use_controller_manager)" />
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find seven_dof_arm_config)/config/controllers.yaml"/>
</launch>3. 为Gazebo配置controller
在前面两篇文章中,有配置过gazebo的controller的参数,rrbot中是叫config/rrbot_control.yaml。7自由度手臂也是一个control.yaml其中都是设置了joint_state_controller/JointStateController和effort_controllers/JointPositionController(rrbot)以及position_controllers/JointPositionController(seven_dof_arm)。然后调用一个launch文件读取配置。
这里的controller借助了action,如果你还有印象,一般action都是trajectory相关的,其实在这里为了与Moveit那边连起来,所以还要设置一个trajectory controller。
trajectory_control.yaml 内容如下
seven_dof_arm:
seven_dof_arm_joint_controller:
type: "position_controllers/JointTrajectoryController"
joints:
- shoulder_pan_joint
- shoulder_pitch_joint
- elbow_roll_joint
- elbow_pitch_joint
- wrist_roll_joint
- wrist_pitch_joint
- gripper_roll_joint
gains:
shoulder_pan_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
shoulder_pitch_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
elbow_roll_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
elbow_pitch_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
wrist_roll_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
wrist_pitch_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
gripper_roll_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
gripper_controller:
type: "position_controllers/JointTrajectoryController"
joints:
- finger_joint1
- finger_joint2
gains:
finger_joint1: {p: 50.0, d: 1.0, i: 0.01, i_clamp: 1.0}
finger_joint2: {p: 50.0, d: 1.0, i: 0.01, i_clamp: 1.0}
seven_dof_arm_trajectory_controller.launch内容如下
<launch>
<rosparam file="$(find seven_dof_arm_gazebo)/config/trajectory_control.yaml" command="load"/>
<node name="seven_dof_arm_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/seven_dof_arm" args="seven_dof_arm_joint_controller gripper_controller"/>
</launch>
4. 启动Gazebo和MoveIt
seven_dof_arm_bringup_gazebo_moveit.launch内容如下<launch>
<!-- load urdf to Gazebo -->
<include file="$(find seven_dof_arm_gazebo)/launch/seven_dof_arm_world.launch" />
<!-- JointStateController and robot state publisher -->
<include file="$(find seven_dof_arm_gazebo)/launch/seven_dof_arm_gazebo_states.launch" />
<!-- ros_control TrajectoryController -->
<include file="$(find seven_dof_arm_gazebo)/launch/seven_dof_arm_trajectory_controller.launch" />
<!-- moveit move group -->
<include file="$(find seven_dof_arm_config)/launch/moveit_planning_execution.launch" />
</launch>
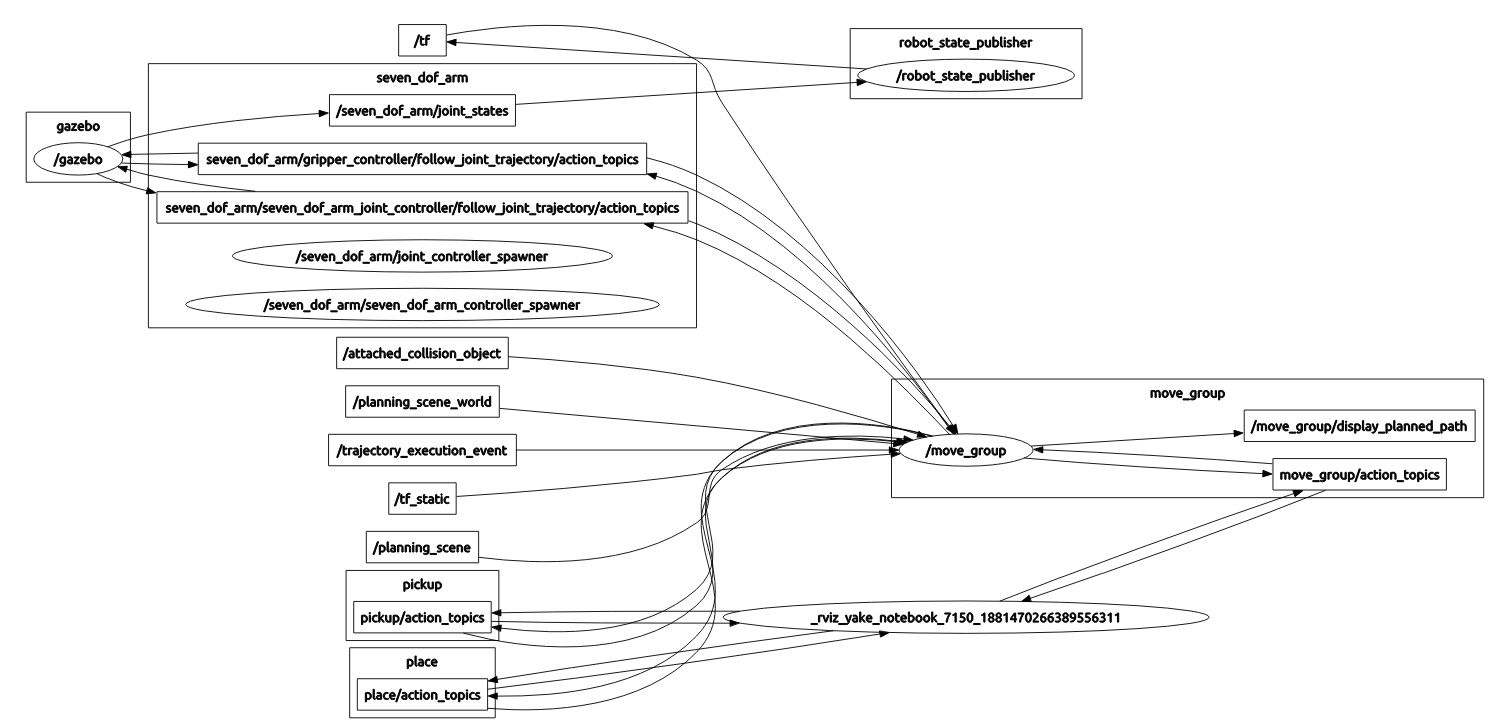
当在rviz中用moveit设置一个目标姿态,然后plan and execute的时候,Gazebo中的模型也动起来了。通过节点关系点图,我们也可以看到,它们之间是通过follow_joint_trajectory/action_topic来进行通讯的。
最后的仿真视频:点击打开视频



评论(1)
您还未登录,请登录后发表或查看评论