

【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境
【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真
【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型
【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理
【ROS&GAZEBO】多旋翼无人机仿真(五)——位置控制器
【ROS&GAZEBO】多旋翼无人机仿真(六)——SE(3)几何姿态控制器
【ROS&GAZEBO】多旋翼无人机仿真(七)——四元数姿态控制
【ROS&GAZEBO】多旋翼无人机仿真(八)——手把手编写四元数姿态控制器
为什么需要四元数
从直观来看,欧拉角或者姿态角是最直观的能感受到三维旋转的表示方法。因此,在做多旋翼或者其他机器人的姿态控制时,最能够直观接受的方法就是欧拉角姿态控制。可能很多人会觉得,为什么需要那么多花里胡哨的方法呢,控制俯仰-滚转-航向三个姿态角就能够稳定姿态了。但是,用姿态角进行控制是有前提的,那就是小角度假设,如果不满足小角度的条件,那么姿态角控制就不适用。姿态角是存在旋转顺序的,并且存在万向节死锁,具体可以看上一篇【ROS&GAZEBO】多旋翼无人机仿真(六)——SE(3)几何姿态控制器
四元数表示
因此,我们想要一种参数少,并且不存在旋转顺序和死锁的姿态描述方法。因此,四元数表示法就被提出来了,四元数通常表示形式是这样的:
q = [ q 0 q 1 q 2 q 3 ]
采用轴角方式表达如下:
q=[cos2αusin2α]
它对应于绕一个向量v = ( v x , v y , v z ) 为轴旋转θ \thetaθ的操作(右手法则的旋转):
q=cos2/θ+isin2/θ+jsin2/θ+ksin2/θ
四元数旋转
我们知道,姿态矩阵左乘向量即可得到旋转后的向量,四元数同样也可以对向量进行旋转,四元数对三维向量的旋转公式如下:
v ′ = q v q ∗
其中v 为纯四元数:
v=[0v]
v就是三维向量,实部为0,这个公式也是四元数旋转中用得最广泛的一个公式。本篇讲的是如何做四元数误差控制,因此证明过程这里不做讲解
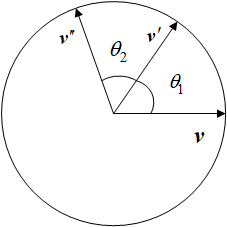
有了这个公式,我们就可以定义四元数的连续旋转。我们来看下面的情况。首先对v 1 进行旋转,这里旋转的四元数是q1
v 1 ′ = q 1 v 1 q 1 ∗
接着用q 2 对v 1 进行旋转:
v ′ ′ = q 2 v ′ q 2 ∗ 可以发现,这里的v ′ ′ \mathbf v''v
′′
是v 1 经过了两次旋转得到的结果,那v ′ ′ 和v 1 的关系是什么样的呢?下面的式子很明显成立
v ′ ′ = q 2 ( q 1 v q 1 ∗ ) q 2 ∗
然后根据单位四元数共轭的性质:
q ∗ = q − 1 可得
v ′ ′ = ( q 2 q 1 ) v ( q 2 q 1 ) ∗ 因此,q 2 q 1 是这两次旋转复合的四元数。也说明了四元数乘法在几何上的意义就是连续的旋转。好了,有了这个性质,我们就可以去计算四元数的姿态误差了。我们来看下面这个图,这个图表示的就是连续旋转两次的意思。
那如果我们把θ 2 换一下,用Δ θ 来表示,v 表示初始水平姿态的向量,v s 表示当前姿态的向量,v d
表示期望姿态的向量。那么连续旋转公式变为:
q d = Δ q ⋅ q s
Δ q 表示的是旋转Δ θ
对应的四元数,q d 表示旋转θ d 对应的四元数,用图来表示如下: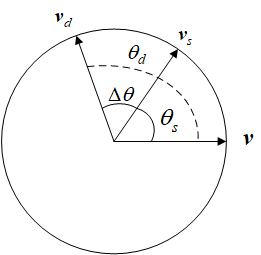
Δq很明显,就是从当前的姿态到期望姿态的误差。那如何得到Δ q 呢?很明显,这不能直接通过减法得到,将上面的式中进行变换:
qd⋅(qs)−1=Δq⋅qs⋅(qs)−1
Δq=qd⋅(qs)−1
终于大功告成,误差四元数计算公式就有了。然后怎么得到各轴误差角度呢?假设期望和当前的误差角很小,那么下式中的s i n θ sin\thetasinθ和θ \thetaθ就可以替换:
q=cos2/θ+isin2/θ+jsin2/θ+ksin2/θ
因此,得到的误差四元数的虚部就是各轴的姿态误差分量,但是还忽略了一个重要的问题,那就是同样的旋转,四元数并不是唯一的,可以通过图来直观的理解一下: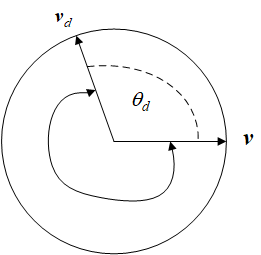
从v 到v d除了虚线表示的θ d 之外,2 π − θ d 很显然也可以达到同样的旋转,这其中就有一个最短旋转角度的问题,但是这两个旋转是有关系的,即2 π − θ d的四元数为− q 。所以,假想一下,飞机从15度回到0度有两种方式,一种是绕轴旋转15度,还有一种是绕轴旋转365度,程序算出来说,哎,我就是玩,我不直接用最小的角度回去,我要绕轴旋转365度回去,,,,好像从原理上来说没毛病,没有错,都可以回到0度,但是实际上没人也不会有人用后面这种方式去这样做吧。。除了谁有十年的脑血栓。
回到正题,我们得到误差的时候也需要去回避这个问题,那怎么去回避呢,上面说过了,− q -\mathbf q−q旋转的角度为2 π − θ d 2\mathrm\pi-\theta_d2π−θ
d
,那就好办了,q的实部q 0 是c o s θ 2 cos\frac\theta2cos
2
θ
,而c o s θ /2 只有在[ − π , π ] 上为正,超过这个范围就为负,那可不可以根据q 0 来判断旋转角是不是最小的呢,答案很明显是的。
因此,只要判断q 0 的正负,就可以判断误差四元数是不是最小的旋转角,如果不是,我们将四元数取反,那最终根据四元数求得到的各轴误差角度分量,误差角度也就是期望的角速度,计算公式就可以整理出来了:
ωd=ksgn(qerr,0)qerr,1:3qerr=qd⋅qs−1
k 是可调节的误差系数,因为是近似的,所以k 可以用来调节误差得到期望角速度的大小。需要注意的是,这里面的乘法是四元数乘法,并且四元数都是单位四元数。
好了,关于四元数姿态控制的内容就讲到这里,下一篇,将介绍如何将四元数控制方法用在四旋翼的仿真中。
最后再讲两句,鄙人也在深入研究四元数、李群和李代数这部分的内容,也深刻体会到四元数误差的推导过程可能会有一点抽象,因为四元数是四维空间的变量,所以并不能很直观的理解,这里需要小伙伴去深入琢磨。此外,四元数是复数的扩展,可能有的小伙伴会说,我连复数都没玩明白,复数其实就可以表示旋转,只不过是2维的旋转,四元数是3维的旋转,因此,复数和四元数有许多相似的性质,讲到这里,是不是感觉有些奇妙和不可思议,这就是数理美妙的所在。欢迎感兴趣的小伙伴添加微信 Reed_UAV 进行交流:





评论(0)
您还未登录,请登录后发表或查看评论