

导航坐标系:东-北-天
载体坐标系:右-前-上
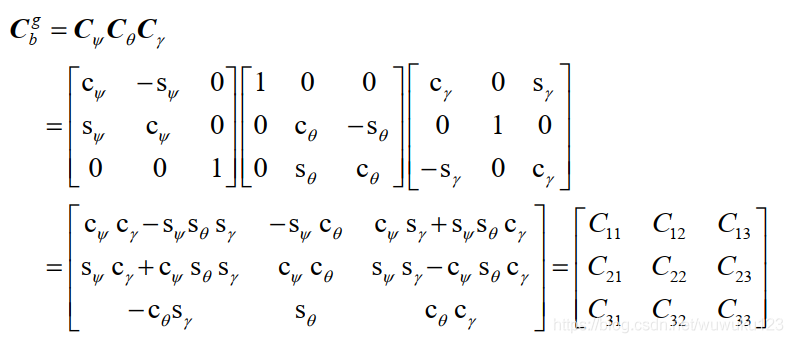
欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角),其中航向角北偏西为正,范围【-pi pi】
一、捷联惯导更新算法
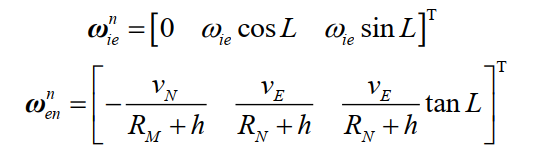
1、导航系相对惯性系旋转(包括两部分)
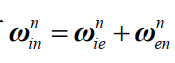
地球自转引起的导航系旋转 和 系统在地球表面移动因地球表面弯曲引起的导航系旋转
2、姿态更新算法:
姿态微分方程如下

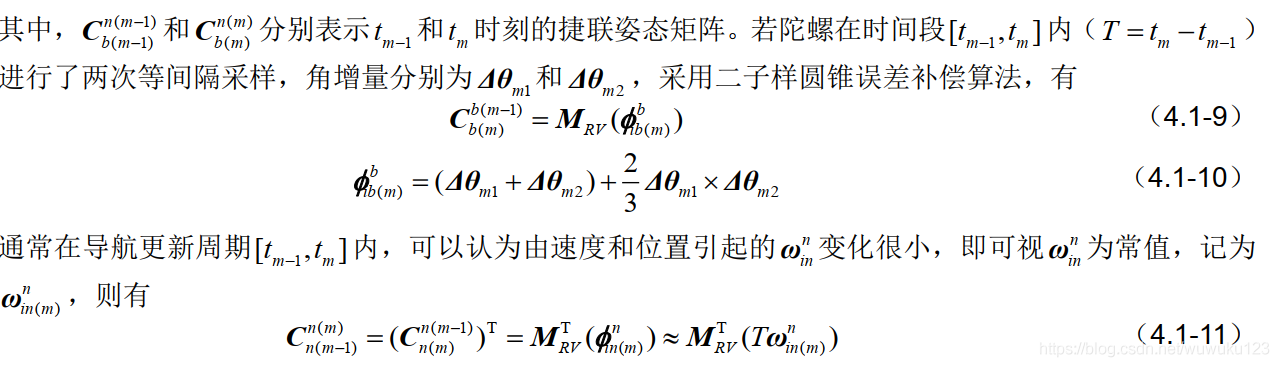
m-1、m时刻,对应的姿态阵在惯性系下面的更新:
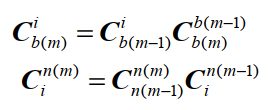

根据矩阵链乘:
既:

3、速度更新算法:
微分方程:

对上式进行积分,得到如下:
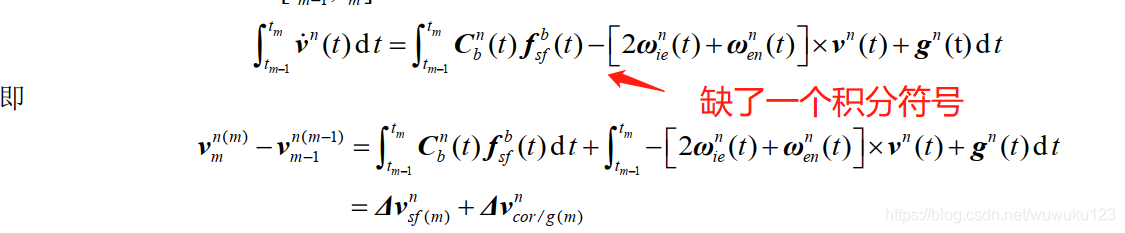
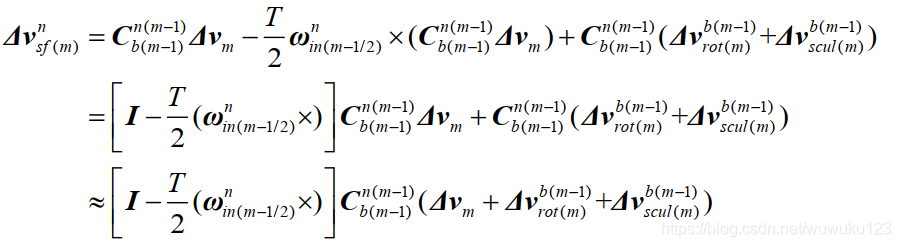
最终为:

其中,第一项为前一时刻(m-1)的速度、第二项为导航系比力速度增量、第三项为有害加速度的速度增量;并且,第三项的数值都是缓慢变化量,可以采用中间时刻值近似代替。
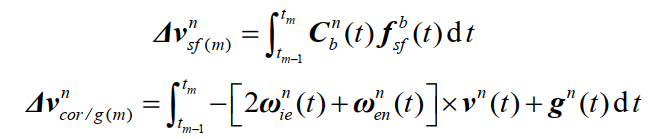
针对第二项,可得:

并且,1、3项对应的旋转矢量如下:

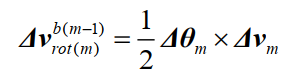
经过简化、分析得:
其中,速度的旋转误差补偿量:

其中,速度的划桨误差补偿量:

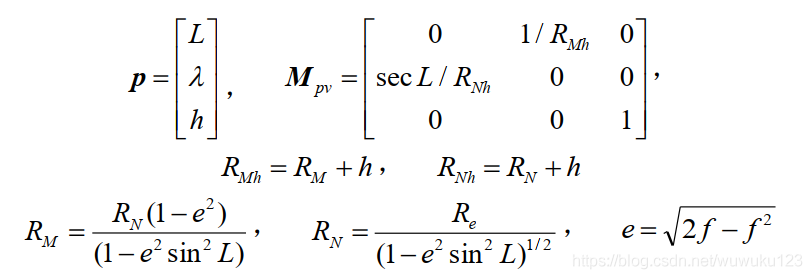
4、位置更新算法:

二、捷联惯导误差方程
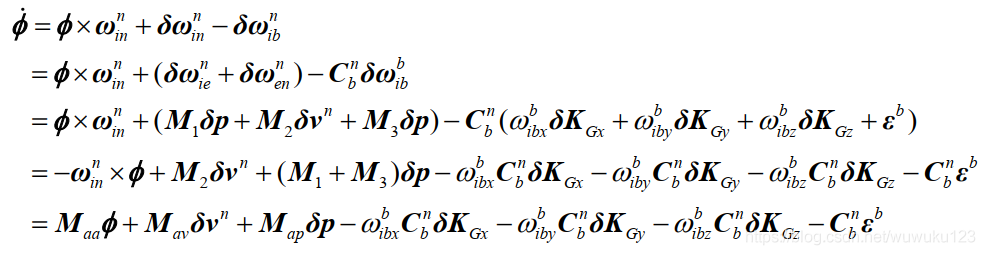
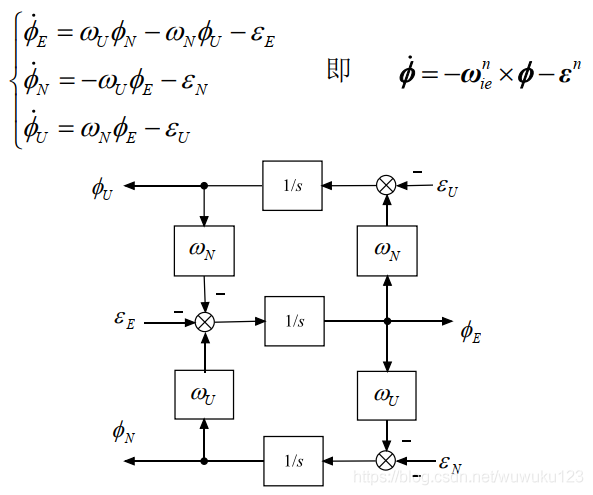
1、姿态误差方程:
n系为导航(参考)坐标系;n'为计算坐标系;从n系到n'系的等效旋转矢量(常称为失准角误差):

既:
![]()
最终为:

经过处理之后,细化方程如下:
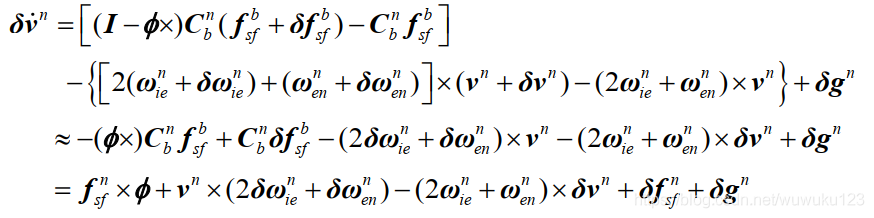
2、速度误差方程:
速度误差是指惯导系统导航计算机中的计算速度与理想速度之间的偏差!![]()
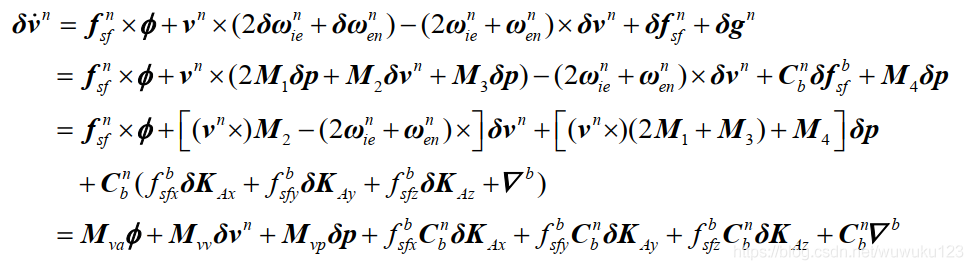
得:
经过处理之后,细化方程如下:
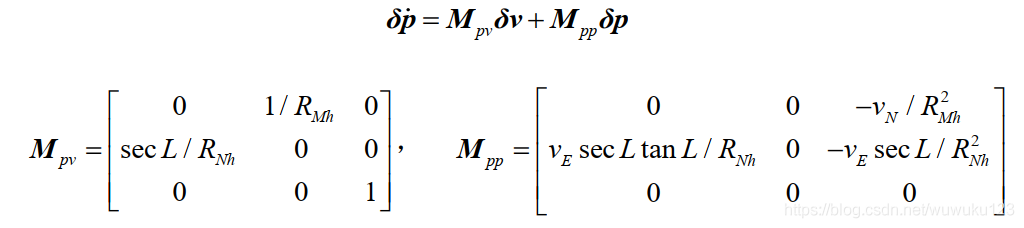
3、位置误差方程:
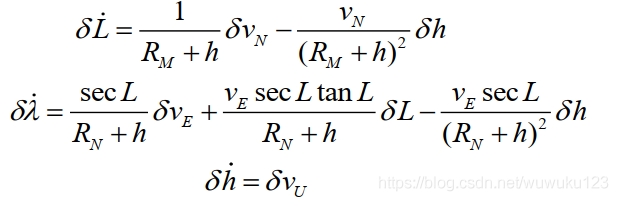
经度误差方程中,含有东向速度误差、纬度误差、高度误差;(含有纬度误差是因为求取卯耰圈时,用到了纬度)
3、位置误差方程:
经度误差方程中,含有东向速度误差、纬度误差、高度误差;(含有纬度误差是因为求取卯耰圈时,用到了纬度)
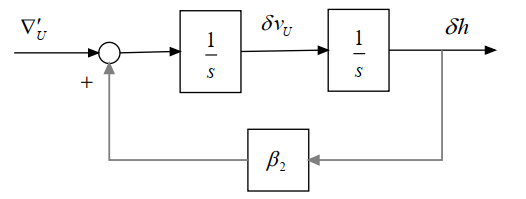
1、高度通道:
纯惯导高度通道发散,是不稳定的!
系统的传递函数含有一个正根;

2、水平通道:
经度误差传播是一个独立过程,仅仅与东向速度误差的一次积分,与其他误差没有关联!

因此,误差状态量仅选取为:【三个姿态角误差、东北向速度误差、纬度误差】
因为,系统是在静止状态下,所以必定是定常系统;
3、简化的水平通道(固定地理位置下的姿态跟踪误差方程)
即:速度误差为0;纬度误差为0;
3.1单纯的失准角误差通道
系统特征方程为:
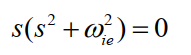
可知,单纯的失准角回路的振荡频率为地球自转频率,周期为24小时。
3.2水平东/北向通道
3.3水平北向及方位通道




评论(0)
您还未登录,请登录后发表或查看评论