

GAAS学习(三)简单全局目标追踪
基于KCF简单目标追踪,方法如下:
编译KCF相关库
git clone https://github.com/generalized-intelligence/GAAS-Object-Tracking.git
cd ./KCF
mkdir build
cd build
cmake ..
make -j6
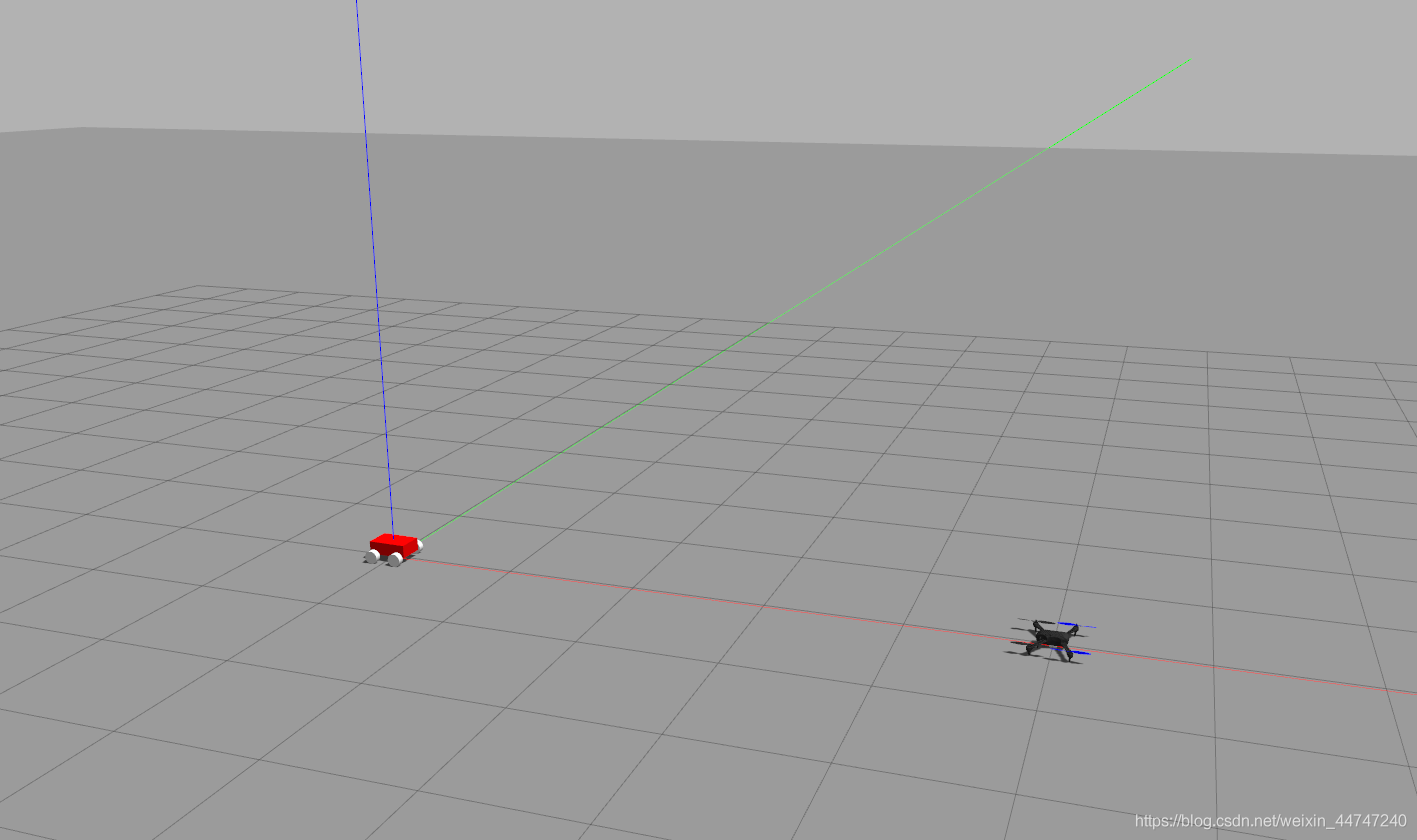
1.运行仿真
roslaunch px4 car_tracking.launch
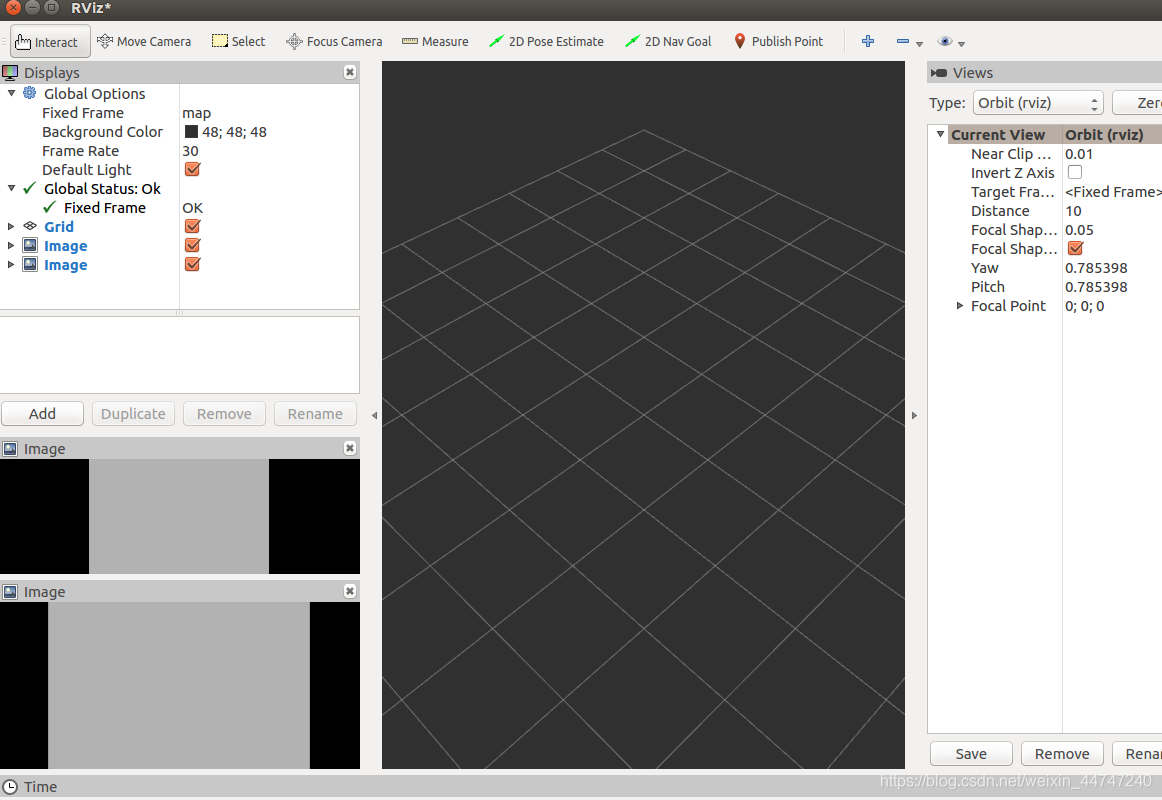
2.运行rviz
rviz
3.悬停三米
python px4_mavros_run.py
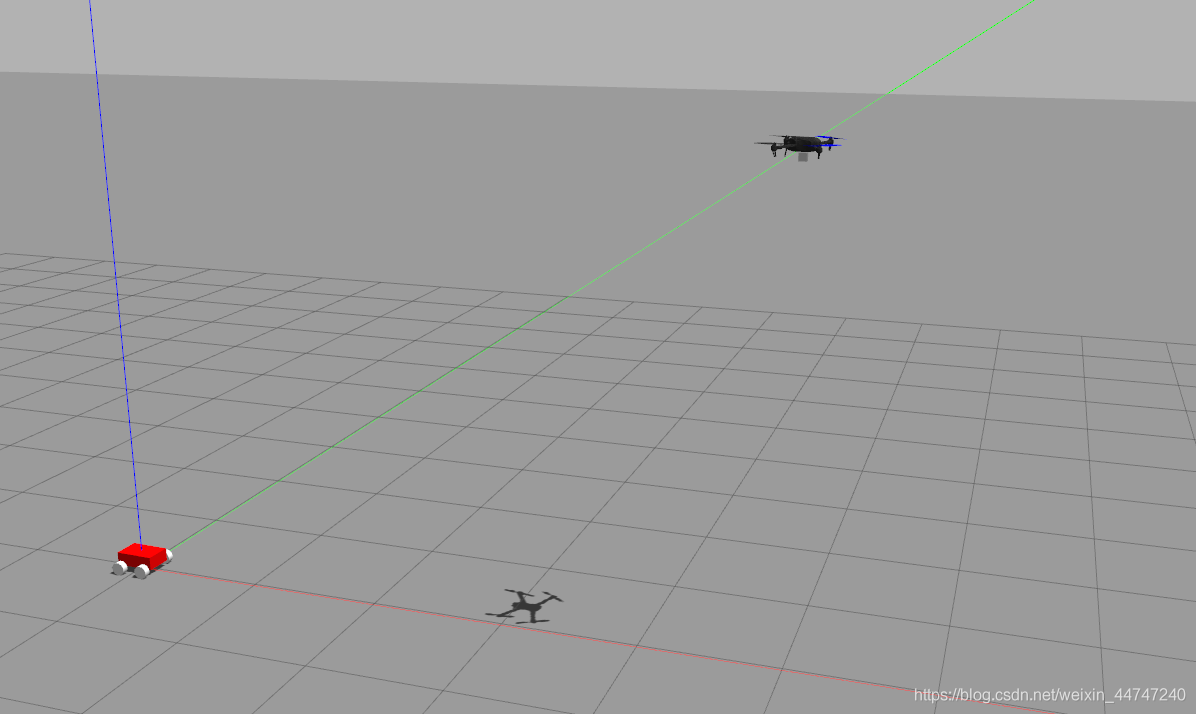
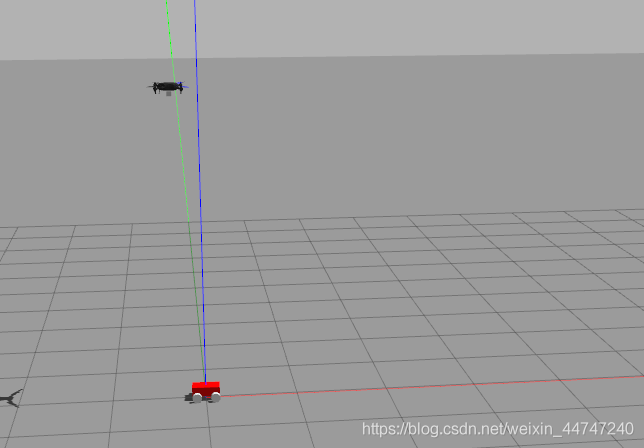
4.飞到小车上方
python init_drone.py
5.打开kcf全局追踪算法
cd ./KCF
./bin/startRosService

6.选择追踪初始位置
注意修改kcf路径
python set_init.py
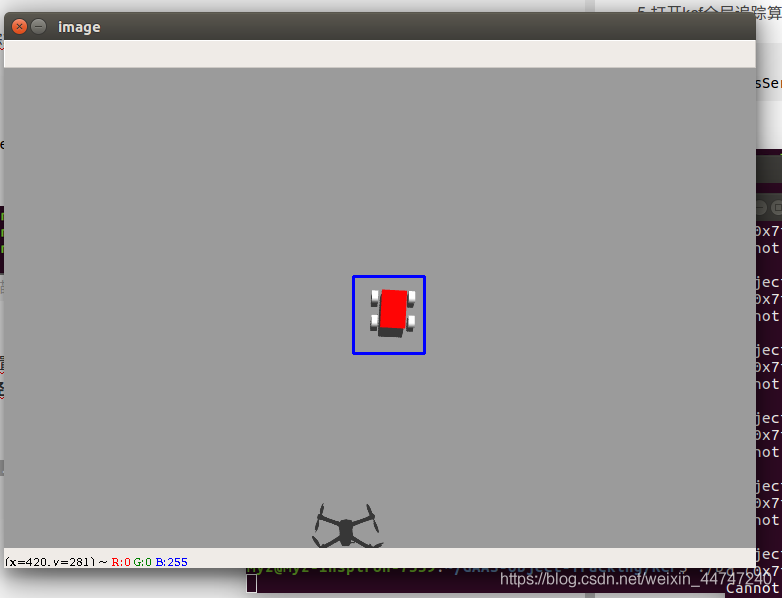
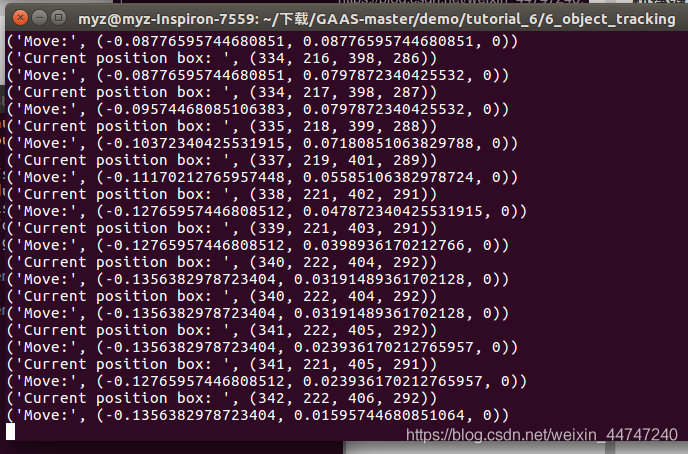
7.启动追踪
python track_and_move.py
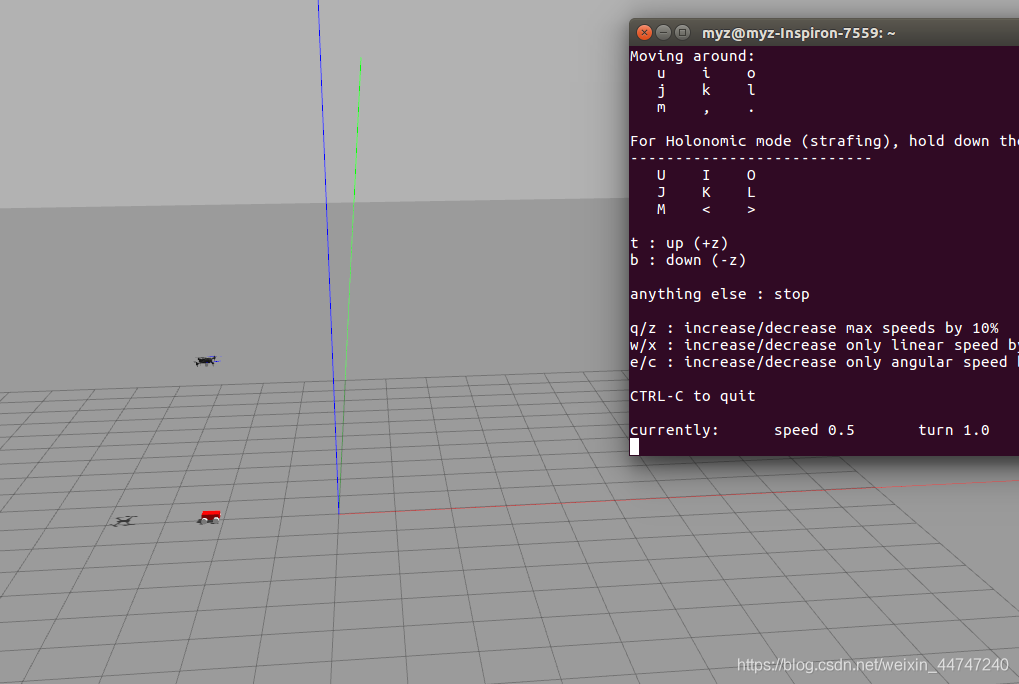
8.控制小车
安装键盘控制插件:
sudo apt install ros-kinetic-teleop-twist-keyboard
运行插件:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
完成
")


评论(0)
您还未登录,请登录后发表或查看评论