

文章目录
0.引言
在进行ROS开发过程中,会创建许多功能包和源代码文件,这些文件少量时,手动管理还能接受,但当工程变复杂,文件增多后,便不易管理,为了管理ROS文件,可以采用QT加上ROS插件来管理ROS工程。笔者参考现有网络资料,实现QT的安装和管理ROS工程。
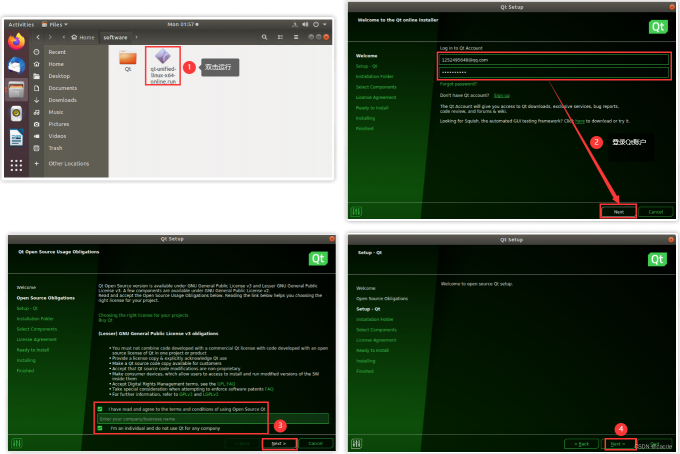
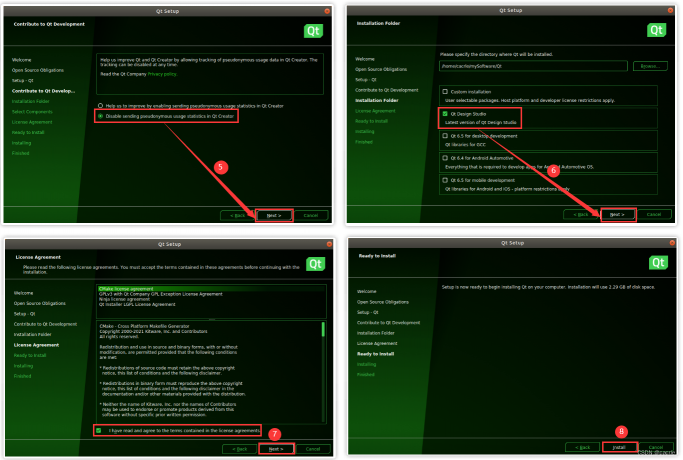
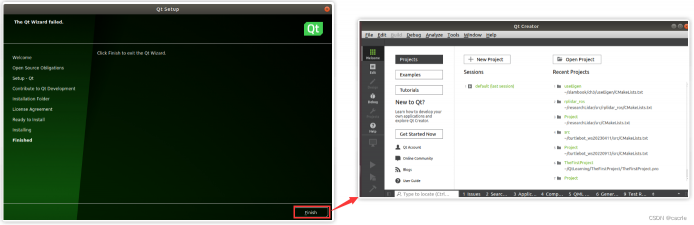
1.安装Qt Creator(带ROS插件)
本文使用Qt5.12,下载地址(百度网盘):QT最新版本下载安装(QT5.15及QT6.X)。
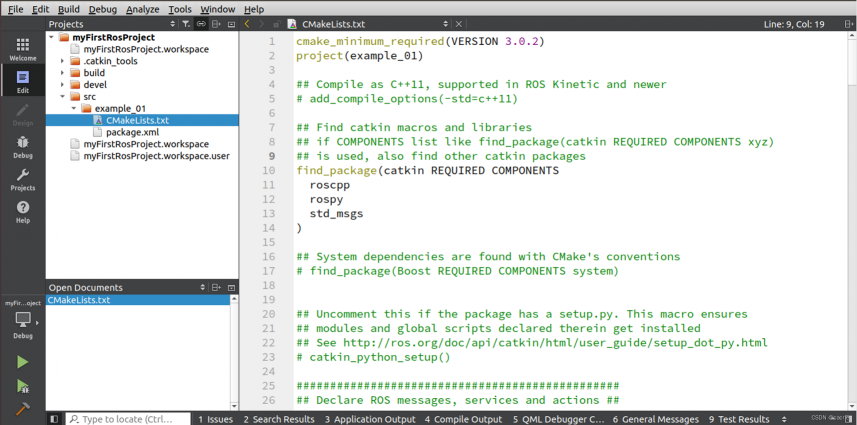
2.创建ROS工程

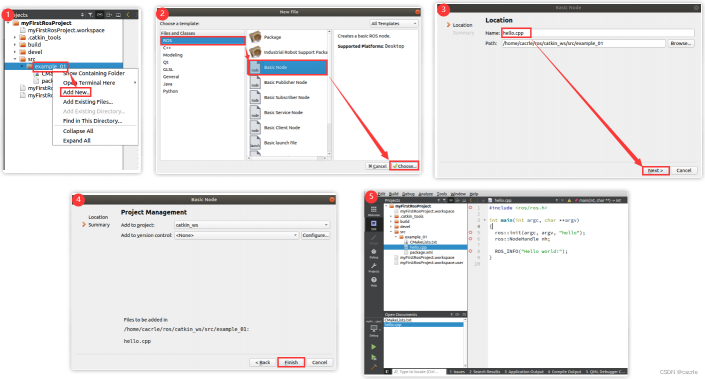
3.创建功能包
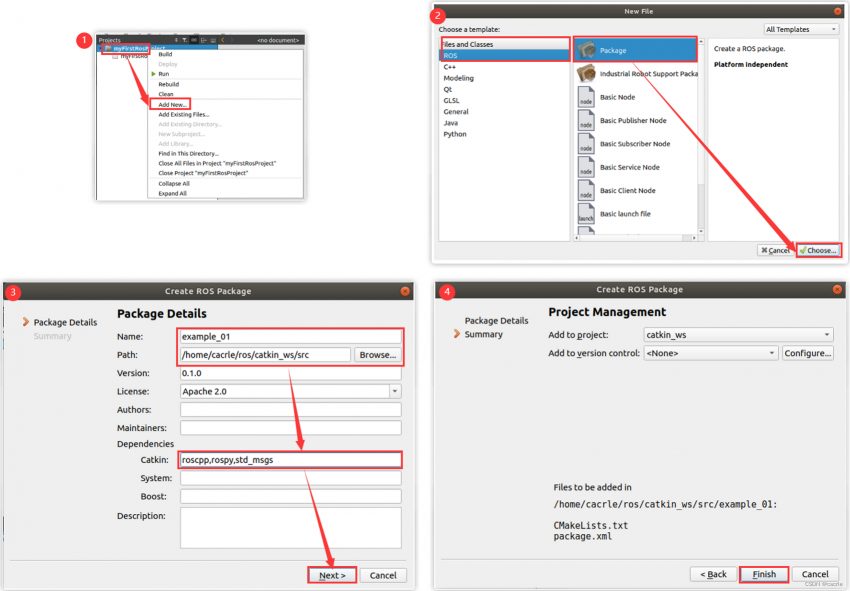
创建完成后,将当前工程关闭后,再重新导入,即可出现新建的功能包。
4.创建节点
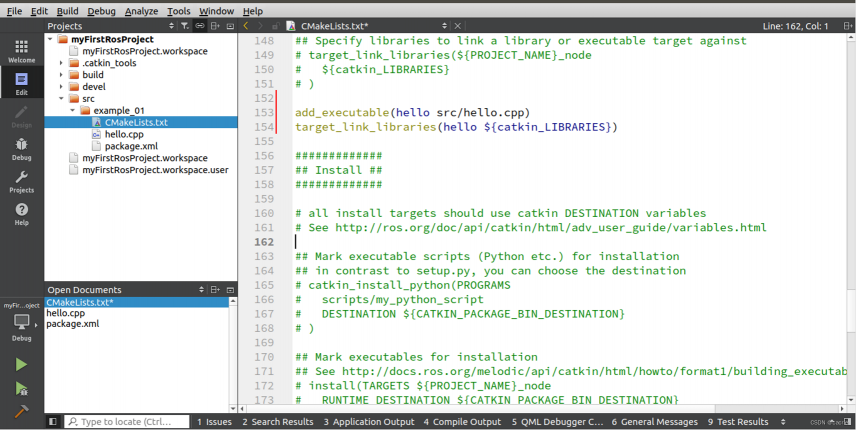
5.添加编译规则
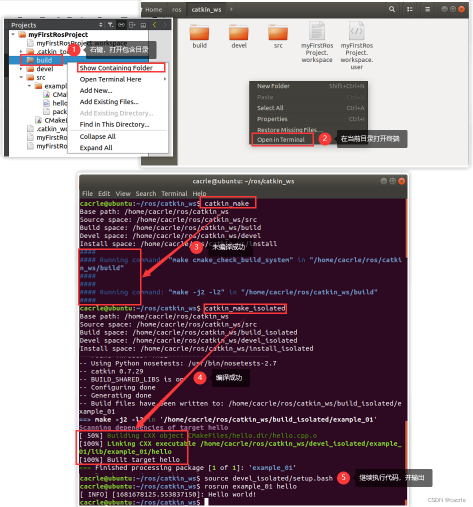
6.编译运行
在笔者的QT系统中直接build编译无法通过,本文采用终端进行手动编译。
参考资料:
[1] 悟道修缘. QT最新版本下载安装(QT5.15及QT6.X); 2022-09-12 [accessed 2023-04-17].
[2] 小小小p鱼. ubuntu18.04 在QT中添加ros环境搭建 亲测可用; 2021-06-21 [accessed 2023-04-17].
[3] xujianjun229. Ubuntu上Qt安装以及配置完整步骤; 2021-07-04 [accessed 2023-04-17].
[4] play with lot. 在ubuntu上搭建qt开发环境; 2020-08-17 [accessed 2023-04-17].
[5] ipfpm. 【ubuntu】如何使用qt creator创建一个ros ui界面; 2019-03-15 [accessed 2023-04-17].
[6] mb5ff2f24b42377 . Ubuntu下Qt编程起步; 2012-05-29 [accessed 2023-04-17].
[7] worthsen. ubuntu下查看Qt的版本; 2017-10-14 [accessed 2023-04-17].
[8] 王亮1. ROS_Kinetic_21 使用Qt Creator Plug in即ros_qtc_plugin; 2016-07-29 [accessed 2023-04-17].
[9] ROS官网. How to Install (Developers); [accessed 2023-04-17].



评论(0)
您还未登录,请登录后发表或查看评论