

1.本篇大纲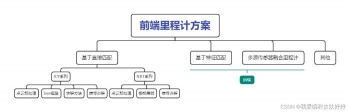
2.前端里程计综述
解决的问题:由原始点云信息求解得到两个关键帧之间的相对位姿约束
输入:原始点云信息
输出:两个时刻之间的位姿关系 P = [R T] (4x4)
主流流程: 点云预处理(提取特征)→建立Loss模型→最优化模型求解→得到P矩阵
3.直接匹配的ICP系列
1)思路:对原始点云进行采样→寻找最近关联点建立Loss模型→求解R,T
2)主要方法框图:
3)模型推导


4.直接匹配的NDT系列
1)思路:点云预处理→空间划分栅格,计算每个栅格内点云的均值+协方差→由联合概率构建Loss函数→求解R,T
思路讲解:NDT的整体思路也是,找到一个位姿关系R,T,使得Y点云在R旋转T平移后和X点云进可能的重合,与ICP不同的是描述重合的Loss函数,NDT用点云分布的概率密度来描述,将联合概率作为Loss函数,举一个简单的一维例子:
10个点云,由四个分布在<0,六个分布>0,如果你求解的RT是对的,那么对应点可以对应上,那么联合概率相当于0.40.4+0.60.6 = 0.52
如果你求解RT正好“完全不对”,那么联合概率相当于0.40.6+0.60.4 = 0.48<0.52
3)模型推导
loss模型




评论(0)
您还未登录,请登录后发表或查看评论