

一、理论分析
1.圆心的求解方法
对于机械臂末端的姿态插补方法与直线规划中所述方法一致,因此,今天我们主要介绍圆弧规划中对于机械臂末端的位置插补。

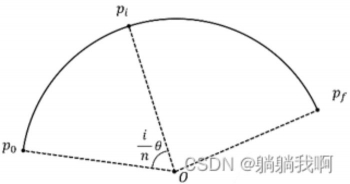
分别为圆弧轨迹的起始点,中间点与目标点,连接三点可构成轨迹所在圆的内接三角形,如下图所示。
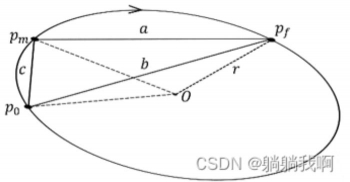
其中,a、b、c 为内接三角形的三边边长,可利用空间中两点间距离公式sqrt((x1-x2)^2+(y1-y2)^2)得到。
设l 为内接三角形的半周长,即(a+b+c)/2 ,则轨迹圆的半径可表示为
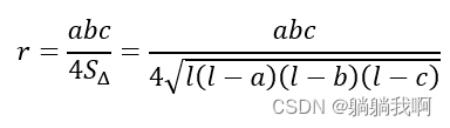
我们设圆心的坐标为O(x,y,z),则满足

以及

对上述几个式子整理,可以得到(后文需要用到)

同时,设轨迹圆所在平面方程为

且平面方程的三个参数可由下式求得(表示为矩阵形式)。
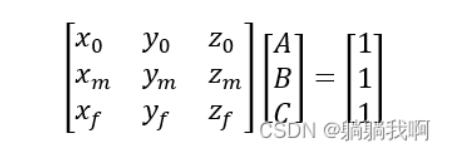
进而将式1与式2同样转为矩阵形式,表示为

此时,通过矩阵运算即可求得圆心坐标。
2.轨迹点的生成
假设我们生成n 个轨迹点,并将圆弧的角度θ 分为n 份,第i 个轨迹点与起始点p_0 所形成弧线的角度为
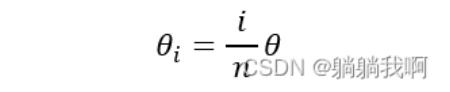
轨迹点i 的位置如下图所示。
我们将轨迹点i 看作由末端执行器从p_0出发,绕经过圆心O且垂直于轨迹平面的轴旋转θ_i 得到的,旋转轴w如下图所示。
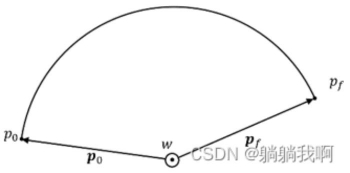
圆弧轨迹旋转轴
与旋转轴同向的单位向量可表示为

描述该变化过程的旋转矩阵可表示为

二、MATLAB程序仿真
参照上述方法,使用MATLAB对其仿真。为便于观察轨迹形状,选择轨迹起始点(230,60,320)、轨迹中间点(230,60,400)以及轨迹终止点(230,200,410)。
第一步,定义机械臂的DH参数
N = 6;%自由度为6
radian1 = pi/180;
%定义关节角度限制
lim1_min = -170 * radian1; lim1_max = 170 * radian1; %关节1(-170,170)
lim2_min = -132 * radian1; lim2_max = 0 * radian1; %关节2(-132,0)
lim3_min = 1 * radian1; lim3_max = 141 * radian1; %关节3(1,141)
lim4_min = -165 * radian1; lim4_max = 165 * radian1; %关节4(-165,165)
lim5_min = -105 * radian1; lim5_max = 105 * radian1; %关节5(-105,105)
lim6_min = -155 * radian1; lim6_max = 155 * radian1; %关节6(-155,155)
%定义关节旋转范围
lim1 = lim1_max - lim1_min;
lim2 = lim2_max - lim2_min;
lim3 = lim3_max - lim3_min;
lim4 = lim4_max - lim4_min;
lim5 = lim5_max - lim5_min;
lim6 = lim6_max - lim6_min;
%D-H参数表
theta1 = 0; d1 = 169.77; a1 = 64.2; alpha1 = -pi/2; offset1 = 0;
theta2 = 0; d2 = 0; a2 = 305; alpha2 = 0; offset2 = 0;
theta3 = 0; d3 = 0; a3 = 0; alpha3 = pi/2; offset3 = pi/2;
theta4 = 0; d4 = -222.63; a4 = 0; alpha4 = -pi/2; offset4 = 0;
theta5 = 0; d5 = 0; a5 = 0; alpha5 = pi/2; offset5 = 0;
theta6 = 0; d6 = -36.25; a6 = 0; alpha6 = 0; offset6 = -pi;第二步,对机械臂进行运动学建模
L(1) = Link([theta1, d1, a1, alpha1, offset1], 'standard');
L(2) = Link([theta2, d2, a2, alpha2, offset2], 'standard');
L(3) = Link([theta3, d3, a3, alpha3, offset3], 'standard');
L(4) = Link([theta4, d4, a4, alpha4, offset4], 'standard');
L(5) = Link([theta5, d5, a5, alpha5, offset5], 'standard');
L(6) = Link([theta6, d6, a6, alpha6, offset6], 'standard');
% 定义关节范围
L(1).qlim=[lim1_min,lim1_max];
L(2).qlim=[lim2_min,lim2_max];
L(3).qlim=[lim3_min,lim3_max];
L(4).qlim=[lim4_min,lim4_max];
L(5).qlim=[lim5_min,lim5_max];
L(6).qlim=[lim6_min,lim6_max];
robot = SerialLink(L,'name','AR3');第三步,定义轨迹的起始点、中间点、终止点以及轨迹点个数
p_start = [200, 60,320]; %圆弧轨迹起始点
p_mid = [200, 60,400]; %圆弧轨迹中间点
p_final = [230,200,510]; %圆弧轨迹终止点
step = 50; %步数第四步,求取圆弧所在轨迹圆的半径
a = norm(p_final - p_mid); %内接三角形边长a
b = norm(p_final - p_start); %内接三角形边长b
c = norm(p_mid - p_start); %内接三角形边长c
l = (a + b + c) / 2; %内接三角形半周长
r = a*b*c/ 4 / sqrt(l*(l - a)*(l - b)*(l - c)); %轨迹圆半径第五步,求取圆弧所在平面方程的参数
solution = [p_start(1) p_start(2) p_start(3) ; p_mid(1) p_mid(2) p_mid(3) ; p_final(1) p_final(2) p_final(3) ] \ [1;1;1];
%A是一个方阵,A\B与inv(A)* B大致相同第六步,求取圆弧所在轨迹圆圆心
%求取圆弧所在轨迹圆圆心
b1 = a*a * (b*b + c*c - a*a);
b2 = b*b * (a*a + c*c - b*b);
b3 = c*c * (a*a + b*b - c*c);
P1 = [p_start' p_mid' p_final'];
P2 = [b1; b2; b3];
P3 = P1 * P2;
center = P3 ./ (b1 + b2 + b3);
center = center';%转置第七步,求取末端执行器在圆弧上运动的旋转轴,过圆心且垂直圆所在平面
vector_start_big = p_start - center; %由圆心指向起点的向量
vector_start = (p_start - center) ./ norm(p_start - center); %由圆心指向起点的单位向量
vector_final = (p_final - center) ./ norm(p_start - center); %由圆心指向终点的单位向量
rotation_axis = cross(vector_start,vector_final); %旋转轴第八步,求取圆弧角度及每个轨迹点之间的角度
theta = acos(dot(vector_start , vector_final));%弧度制的圆弧角度
%theta = rad2deg(theta);%角度制的圆弧角度
theta_per = theta / step;%角度制的每个轨迹点之间的角度第九步,初始化轨迹点数组
theta_current = 0; %初始化当前路径点与起始点之间的角度
p_current = 0; %初始化轨迹点位置第十步,轨迹规划,生成轨迹点
for t = 1 : step + 1
matrix_current = rotation_matrix(rotation_axis,theta_current); %旋转矩阵的计算
vector_current = matrix_current * (vector_start_big'); %使向量绕旋转轴旋转
p_current = center + vector_current'; %轨迹点坐标
T_current=transl(p_current); %起始点齐次变换矩阵
Tc(:,:,t) = T_current; %保存轨迹点为齐次变化矩阵
theta_current = t * theta_per; %角度变化
end其中,rotation_matrix为自行定义的函数,内容如下方代码段所示
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%2022.5.19%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%定义计算旋转矩阵的函数%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%liutangplease%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function r_matrix=rotation_matrix(axis,theta)
axis = axis / norm(axis); %将旋转轴变为单位向量
theta = theta;
a = cos(theta / 2);
bcd = - axis .* sin(theta / 2);
b = bcd(1);
c = bcd(2);
d = bcd(3);
aa = a^2; bb = b^2; cc = c^2; dd = d^2;
bc = b * c; ad = a * d; ac = a * c; ab = a*b; bd = b * d; cd = c * d;
r_matrix = [(aa + bb - cc - dd) (2 * (bc + ad)) (2 * (bd - ac)) ; (2 * (bc - ad)) (aa + cc - bb - dd) (2 * (cd + ab)) ; (2 * (bd + ac)) (2 * (cd - ab)) (aa + dd - bb - cc)];
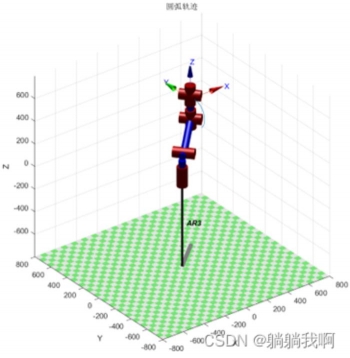
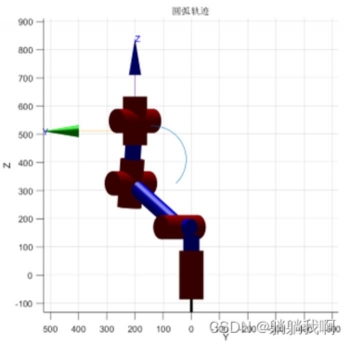
end最终效果如下所示
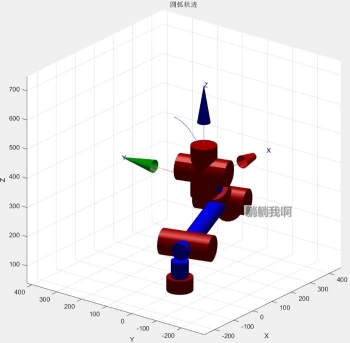

三、编程实现

其中红色圆弧为机械臂运动所得轨迹,蓝色虚线代表轨迹所在的轨迹圆,蓝点为其圆心。




评论(2)
您还未登录,请登录后发表或查看评论